Kui Apple toodaks jalgrattaid, siis... Lenkstangi keeramine oleks tasuta, pidurdamine aga tasuline. Kummidesse sobiv õhk maksaks 5 eurot, pumbata
|
|
|
- Linda Saare
- 2 aastad tagasi
- Vaatused:
Väljavõte
1 Kui Apple toodaks jalgrattaid, siis... Lenkstangi keeramine oleks tasuta, pidurdamine aga tasuline. Kummidesse sobiv õhk maksaks 5 eurot, pumbata saaks seda ainult spetsiaalse pumbaga, millel oleks spetsiaalne iventiil. Teiste rataste õhk ja pumbad irattale ei sobiks. Pakiraam oleks küll olemas, kuid sellel ei tohi kedagi sõidutada, sest see läheks litsentsitingimustega vastuollu. iratas sõidaks kiiresti, ent pedaale sõtkuda oleks väga raske ja jõudu jätkuks maksimaalselt pooleks päevaks. Uus iratas maksaks kolm korda rohkem kui tavaline ratas, aga hammustatud õuna pildi ja stiilse valge raami eest oleksid inimesed nõus maksma mida iganes. Apple süüdistaks teisi jalgrattatootjaid patendiseaduse rikkumises, sest ka nende sõiduriistadel on ümmargused rattad.

2 MHK0120 SISSEJUHATUS MEHHATROONIKASSE Sügis 2020 Tagasiside, ehk mida mõõdame, seda saame Martin Jaanus NRG Õppetöö : Õppematerjalid :
3 Teemad Negatiivne tagasiside Signaaligraaf Rakendused elektoonikas, mehaanikas, mehhatroonikas Positiivne tagasiside, rakendused Kui tagasisidet lihtsal viisil kasutada ei saa.

.")
4 Tagasiside Tagasiside on süsteemi väljundi toime tema sisendile. Negatiivsel tagasisidel (vastuside) mõjub väljundi suurenemine sisendit vähendavalt. See võimaldab süsteemil tasakaalustuda. (aktsiisid, euribori reguleerimine) Positiivse tagasiside (päriside) korral mõjub väljundi suurenemine sisendit suurendavalt. (ebastabiilsus, generaatorid, lõhkeseadeldised, majanduskasv laenurahaga). Vastusidestatud süsteemi korral Mida mõõdame, seda saame (automaatikute vanasõna) Tahtsime parimat, aga välja kukkus nagu alati. By Lee Jordan - Flickr, CC BY-SA 2.0, By Andy Docker from England - Stampede
5 Näide tavalisest süsteemist See pilt on mõeldud mehhatroonilise süsteemi jaoks Elektrisignaal Andurid Andmed Juhtseade (kontroller,arvuti...) Elektrisignaal Täiturid (elektromehaanika) Mehaaniline mõju Platvorm ( Robot, auto, tootmisliin...)
6 Näide, kuidas tudengid õpivad Inimene Arvuti Inimene (õppejõud,juhendaja ) Inimene Eesmärk Juhendaja Õppija Tulemus Mõõtja Inimene Arvuti Mõõdetakse ära õppurite praktiliste ülesannete lahendamisoskused. Lõppkokkuvõttes tulemus peaks = eesmärk.
7 Negatiivne tagasiside (vastuside) u sisend ( vaba muutuja) y väljund (sõltuv muutuja) K päriahela ülekanne β tagasisideahela ülekanne Võrdluselement u + Ülekanne on defineeritud väljund/sisend - Päriahel K β y Tagasiside ahel Sisend ning väljund ei pruugi olla vaid elektrilised suurused vaid ka mehaanilised, majanduslikud, poliitilised (raha, tehase toodang,ülikooli lõpetajad...) Automaatjuhtimises y teisendatakse tagasi u ga võrreldavasse kujusse ja neid võrreldakse Automaatjuhtimise alus (automaatregulaatori põhiskeem)!
8 Negatiivne tagasiside (vastuside) u sisend ( vaba muutuja) Päriahel y väljund (sõltuv muutuja) u + y - K K päriahela ülekanne β tagasisideahela ülekanne β Kβ >0! Tagasiside ahel Väljundi ja sisendi vahel kehtib järgmine seos : y = K (u yβ) Päriahela sisendis toimub lahutamine! y = Ku Kyβ y + Kyβ = Ku y(1 + Kβ) = Ku K K Võrdluselement y = u y = ja kui Kβ>>1 siis y = 1 1+Kβ u 1+Kβ u β Olulisim efekt - y/u pole tundlik K suhtes kui see on piisavalt suur!
9 Kui tass on piisavalt täis
10 Näide 1 Olgu meil u =100 ( mv, ainepunkt, majandusnäitaja, rad/s...mis iganes) β =1 K võimekus, võimendustegur: u=100 + K=10 (korda) y = 100 = K=100 (korda) y = 100 = K=1000 (korda) y = 100 = K=10000 (korda) y = 100 = Mida suurem on K, seda paremini toimib. Sestap üritatakse teha K võimalikult suur, samas ta võib ta muutuda väga suurtes piirides! - Päriahel y K β=1 Tagasiside ahel
 K=100 (korda) y = 100 = 98.98.. 1+(100 2) 1 K=1000 (korda) y = 100 = 99.89.. 1+(1000 2) 1 K=10000 (korda) y = 100 (1000 2) (10000 2) 1+(10000 2) 1 = 99.99... - K Tagasiside ahel (-2), näiteks vargus Päriahel β=1 y Päriahela võimendus väheneb 2 võrra!")
11 Näide 2 lisame juurde häire Olgu meil u =100 ( mv, ainepunkt, majandusnäitaja, rad/s...mis iganes) β =1 K võimekus, võimendustegur: u= K=10 (korda) y = 100 = (100 2) K=100 (korda) y = 100 = (100 2) 1 K=1000 (korda) y = 100 = (1000 2) 1 K=10000 (korda) y = 100 (1000 2) ( ) 1+( ) 1 = K Tagasiside ahel (-2), näiteks vargus Päriahel β=1 y Päriahela võimendus väheneb 2 võrra! Mida suurem on K, seda rohkem väljundi häireid maha surutakse.
12 Näide 3 valetamine (juurdekirjutus, pluss) Olgu meil u =100 ( mv, ainepunkt, majandusnäitaja, rad/s...mis iganes) β =1 Päriahel K võimekus, võimendustegur: u= K= K=10 (korda) y = 100 = K=100 (korda) y = 100 = (100+2) K=1000 (korda) y = 100 = (1000+2) K=10000 (korda) y = 100 = ( ) 1 β=1 y Tagasiside ahel +2 tegin 2 tk rohkem Väljundi väärtus väheneb, aga K suurenedes mitte oluliselt.
13 Näide 3 valetamine (juurdekirjutus, korda) Olgu meil u =100 ( mv, ainepunkt, majandusnäitaja, rad/s...mis iganes) β =1 Päriahel K võimekus, võimendustegur: u= K= K=10 (korda) y = 100 = K=100 (korda) y = 100 = K=1000 (korda) y = 100 = K=10000 (korda) y = 100 = β = 0. 5 β=2 y Tagasiside ahel Väljundi väärtus sõltub peamiselt β suurusest *2 tegin 2 korda rohkem Järeldus : tuleb valida selline β, et saaksime soovitud tulemuse (soovitud tulemuse pöörduurus kui K on piisavalt suur) Spikerdamisel on siis mõte kui õpitakse emale, vanaemale, sponsorile..
14 Näide 3 valetamine (juurdekirjutus, korda) Olgu meil u =100 ( mv, ainepunkt, majandusnäitaja, rad/s...mis iganes) Päriahel β =1 u=100 + K võimekus, võimendustegur: - K=1000 y K=10 (korda) y = 100 = K=100 (korda) y = 100 = K=1000 (korda) y = 100 = K=10000 (korda) y = 100 = β = 2 β=0.5 Tagasiside ahel 1/2 tegin 2 korda vähem See on tegelikult see, mida me automaatjuhtimisüsteemilt soovime saada, soovitud väljund! β võib olla suvaline tegevus. Valetage, et õppisite 2 x vähem tulemus: teid sunnitakse 2x rohkem õppima ehk saate 2x rohkem targemaks

15 Tagasiside, näiteid reaalelust Milline peab olema sisend u, et y oleks selline, nagu meil vaja? u=y*β Mis seadesuurus tuleb kontrollerile anda, et robot liiguks ühtlase kiirusega 5 m/s? Milline peab olema anduri väljundpinge? Aga ka: Mitu last ma pean tegema, et saada toetust 500 eurot kuus? Mitu punkti ma pean koguma, et saada hinne 5? Kui palju tuleks X aktsiisi kergitada, et teenida riigikassasse y miljonit eurot? Päriahel Valetamine töötab vaid siis kui sihtmärk seda ei tea! u + - K β y Tagasiside ahel
! Sõltuvus nii mingist ainest, tegevusest kui ka isikust https://en.wikipedia.")
16 Positiivne tagasiside (päriside) Generaatorid Trigerid Kogu digitaaltehnika (elektrilised suurused on analoog) Lõhkeained (sotsiaal)meedia?, kuulujutud, lambakari Püramiidskeemid Viirused (Covid 19)! Sõltuvus nii mingist ainest, tegevusest kui ka isikust
17 Positiivne tagasiside (päriside) Väljundi suurenemine mõjub sisendit suurendavalt. Kβ <0! Olgu meil u =100 ( mv, ainepunkt, majandusnäitaja, rad/s...mis iganes) β =-0.01 Päriahel K võimekus, võimendustegur: u= K y β =-0.01 K=10 (korda) y = 100 β =-0.05 K=10 (korda) y = = = = 100 = Jah, see toimib kui β on väike! Suuga teeme suure linna aga edasi.palju hullem, kui K läheb ka suureks ja jõudu on palju! β=-0.01 Tagasiside ahel
18 Positiivne tagasiside (päriside) Väljundi suurenemine mõjub sisendit suurendavalt. Kβ <0!, eriti hull kui 1+ Kβ =0 Olgu meil u =100 ( mv, ainepunkt, majandusnäitaja, rad/s...mis iganes) β =-0.1 Päriahel K võimekus, võimendustegur: K=10 (korda) y = 100 K=100 (korda) y = 100 K=1000 (korda) y = 100 K=10000 (korda) y = = u=100 + = - 0 = ,111.. Sisend on 100 mv, väljund on 11 kv??? K mõju suureneb (mõnikord kasutatakse seda ära ) K β=-0.1 = Tagasiside ahel = y
19 Sisend (V,I) Väljund (V,I) Võimendi Võimendi on seadis, mis välist energiaallikat kasutades tõstab signaali võimsust. Saab käsitleda kui mittepööratavat kaksporti, vajab aktiivkomponenti. Vcc + K Pingevõimendi Vooluvõimendi V-I muundur (ülekanne - juhtivus) I-V muundur (ülekanne - takistus) Ülekanne (võimendus) K V = V out V in, K V db = 20 log(k V ) Võimsusvõimendus K P = P out P in, K P db = 10 log(k P ) K I = I out I in, K I db = 20 log(k I ) K V ei pea = K I Võimsus on võrdeline pinge (ja ka voolu ) ruuduga!
 K on väga suur (kuni 1000 000) Mõõtevõimenditel K fikseeritud Väga universaalne Kui on negatiivselt tagasisidestatud, omandab väljund väärtuse (V või I), et Vin1=Vin2.")
20 Operatsioonõimendi Idee 1930 ndatest aastatest, patent Võimendab vaid sisendsignaalide vahet (diferentsiaalvõimendi). Vin1 Vin2 + K - Väljund (V,I) K on väga suur (kuni ) Mõõtevõimenditel K fikseeritud Väga universaalne Kui on negatiivselt tagasisidestatud, omandab väljund väärtuse (V või I), et Vin1=Vin2. Väljundpinge V out =K (Vin1 Vin2) Opvõimendiga saab analoogelektroonikas praktiliselt kõike teha!!! Kõiki difsisendiga võimendeid saab käsitleda OVna (helivõimsusvõimendid) OV-l võivad olla lisaklemmid korrektsioonideks.
21 Operatsioonõimendi Mitteinverteeriv võimendi. Väljundpinge V out =K (Vin1 Vin2) Vin1 Vin2 R1 + K - R2 Vout Anname inverteerivasse sisendisse pinge väljundist läbi pingejaguri R 1 Vin2 = Vout R 1 + R 2 Asendame Vin2 ülemisse valemisse, saame: V out = K (V in1 V out R 1 ) R 1 +R 2 K V out = V in1 1+K R 1 R1+R2 See on jadapingevastuside Kui Kβ >>1,siis K f = 1 β = R1+R2 R1 Mida suurem on K, seda väiksem on selle mõju! Tagasiside (pingejaguri ülekanne) β = 1 + R2 R1
22 Operatsioonvõimendi Inverteeriv võimendi R1 Vin, Iin Vin1=0 Vin2=0 + K - R2 Vout,Iout Opvõim käitub ideaalis sedasi: Vin1=0 -> Vin2=0 K Sisendvool I in =Vin/R1 Saab minna vaid väljundisse V out =R2 I in Paneme kokku Vout = Vin R 2 R 1 K f = R2 R1 virtuaalmaa See on rööppingevastuside Saab tekitada takistuste suhtega teise pinge. Väljund käitub kui pingeallikas.
23 Signaaligraafidest Signal Flow Graph S.J. Mason Lineaarse võrrandisüsteemi kujutus graafide abil Võrrandisüsteemi on võimalik lahendada vahetult signnaaligraafi kasutades Eelnevatel slaididel oli see sisuliselt olemas Võrdluselement Päriahel u 1 ε 0 K y u + ε 0 - K y -1 β x β Tagasiside ahel x
24 Signaaligraafidest Eelised võrreldes võrrandite või maatriksite ees Näitlik Puuduvad nullised kordajad (täielikus võrrandisüsteemis võib olla palju nulle) Hästi nähtavad mõjutused muutujate vahel Signaaligraafi koostamine on kasulik, kuid lahendamine võib olla tülikas suurte süsteemide korral. u 1 ε 0 K y -1 β x
25 Signaaligraafidest Võrrand Kordaja Vaba muutuja Sõltuv muutuja Signaaligraaf Kaar+ülekanne Tipp (allikas) Tipp (neel) Tippu sisenevad kaared annavad vastava tipu võrrandi parema poole: x=b*y+a*z y ja z on sõltumatud muutujad X on sõltuv, a ja b ülekanded y b x c w Selles graafis puuduvad tuurid ehk silmused (tagasiside), praktikas see juhtum praktiliselt puudub! a z w=c*x
26 Signaaligraafidest Tuurid, muutuja väärtus sõltub iseendast (tagasiside) lisab keerukust juurde y on sõltumatu muutuja X on sõltuv, a ja b ülekanded Z sõltub w-st (tekib silmus, tuur, omakorda sõltub ka sellest x) Kuidas sõltub väljund w sisendist y: w=y*b*c+w*a*d y b x c w w= y b c 1 a c d (kui meid ei huvita z ja x väärtused, ei pea me võrrandeid üles kirjutama) X=y*b+z*a Z= w*d a z d Ülesanne võib olla mittelahenduv kui a*c*d=1! Kui a*c*d on lähedane ühele, on lahend väga tundlik.
27 27 Tuurid (silmused) allikas t neelud x a b y y = abx + atbx u + at 2 bx +... = = abx kui t<1 ab ( ) 1+ t + t = x 1 t
28 28 Tuurid (silmused) allikas t neelud x u = y = ax bu + a tu u Lahendus: y = ab x t 1 1 t b See on eraldi võrrand! y
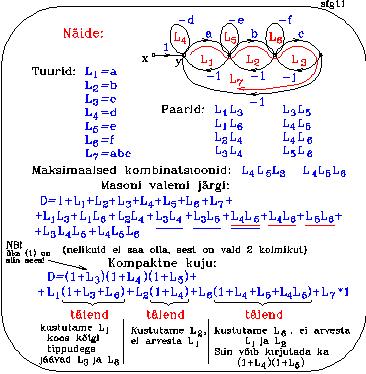
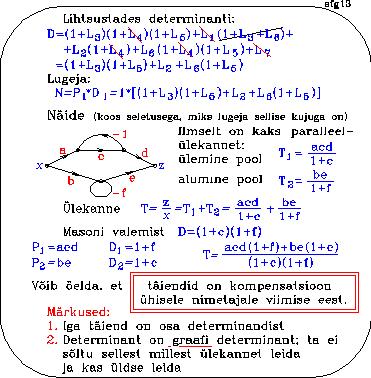
29 Signaaligraafide lahendamine Universaalne võte on kasutada Masoni valemit (näide Vello Kukk, 2004) 29 Ülekanne T = N D Ülekande lugeja (numerator) Süsteemi determinant Põhieeskiri on determinandi leidmiseks! (lugejas võib esineda ainult osa determinandist kuid mitte midagi rohkem!)
30 Determinant (üldkuju) D = 1+ L + L + L L + + L L L n=1 Tuuride ülekanded n=2 n=3 Mitte kokkupuutuvad tuurid! Tuuri ülekanne L=(-1) n * tuuris olevate kaarte korrutis. Kui paaritu miinus ette. Mittepuutuvatel tuuridel ei ole ühiseid tippe.
31 Determinant,näide t L b -a L 2 Kaks silmust: L 1 ja L 2 L L 1 2 = = ( 1) ( a) 1 t = at ( 1) 1 ( b) s = bs s Kaks ühist tippu -1 tuleb ette panna! D =1+ at + bs
32 Lugeja, näide Teekonnad allikast meile vajalikku tippu. (päriahel) Päriahela ülekandes sisalduvad kaarte ülekanded. Teekonna täiend tuurid, mis ei puutu päriahelaga kokku. N = P D k k P k Teekonna ülekanne D k Teekonna täiend Kui ei ole tuure, D=1
33 Näide 1 t L L u D = at = 1+ L b -a L 2 w s 1 P 1 = ab D 1 = 1 2 = bs P 2 = w D 2 = 1 + at N = ab + w 1 + at at + T = y u bs = ab + w 1 + at 1 + at + bs y
34 Näide 2 t L L u 1 2 D = = at bs = 1+ L b -a x L 2 w s at + bs T = x u = a + ws 1 + at + bs P 1 P 2 N = a = ws = a + D 1 D 2 ws = 1 = 1
35 Signaaligraafi koostamine Üldjuhul alustatakse lõpust- näide pingejagur R1 I=0! Milline on Vout/Vin? V in + V + R2 V out K= Vout Vin = R2 R1+R2 I 1 Lisa tipp (mida saada soovime) V out 2 Kuidas sõltub tipu väärtus selle küles olevast elemendist (Võrrand Ohmi seadus) I R2 V out
36 Signaaligraafi koostamine R1 I=0! Milline on Vout/Vin? V in + V + R2 V out I 3. Lisame teise avaldise voolu (I) jaoks V in 1 V R1 I V out 1/R1 R2
37 Signaaligraafi koostamine I R1 I=0! Milline on Vout/Vin? V in + V + R2 V out 4. Pinge VR1 on sisendpinge ja väljundpinge vahe! V in 1 V R1 I V out Ka siin on mängus tagasiside. 1/R1-1 R2
38 Signaaligraafi koostamine V in + I R1 I=0! Milline on Vout/Vin? V + R2 V out N= R2 R1 D = 1 + R2 R1 V in 1 V R1 I V out 1/R1-1 R2 K= R2 R1 1+ R2 R1 = 1 = 1 R1 R2 (1+R2 R1 ) 1+ R1 R2 = 1 R2 R2 +R1 R2 = 1 R1+R2 R2 = R2 R1+R2
39 Signaaligraafide lahendamine (slaidid,näide Vello Kukk, 1992)
40 Signaaligraafide lahendamine
41 Signaaligraafide lahendamine


 Mehaaniline tagasiside")

42 Mehaaniline tagasiside Näide aurumasin Aurumasinate suur probleem ebastabiilsus 1781 Mehaaniline tagasiside (kiiruse stabilisaator, James Watt, patent) Mehaaniline tagasiside pöörlemiskiiruse stabilisaator Pildid: wikipedia ja
43 Tagasiside ja mehhatroonika Probleem: Kõik ei toimu hetkega!, mängu tuleb aeg ja dünaamika. Kõik, mis esmapilgul lihtne, võib osutuda keeruliseks. Elektrisignaal Sensorid Andmed Juhtseade (kontroller,arvuti...) Elektrisignaal Täiturid (elektromehaanika) Mehaaniline mõju Platvorm ( Robot, auto, tootmisliin...)


44 Näide -servomootor Servomootori sees Mikrokontrolleri sees Signaaligraaf annab väga ülevaatliku pildi By Constant314 - Own work, CC0,
45 Aeg ja tagasiside (stabiilsus ajas) Dünaamika, inertsiga (mehaaniline, elektriline, aga ka majanduslik...poliitiline) kaasnevad tagasisidega ebameeldivused, eelkõige mittestabiilsus. Näide K=2, β=1, ülekanne on 2/(1+2)=2/3, juhul kui kõik toimuks hetkega Oletame, et aeg on diskreetne (tänapäeva süsteemides valdavalt see on) ja väljundisse jõuab signaal üks takt hiljem! Vaatluse hetkel väljund=y=0.66, viga 1% Sisendis ette antud suurus 1 x u=1 1 K=2 y -1 β=1

46 Aeg ja tagasiside (stabiilsus ajas) x u=1 1 K=2 y -1 β=1 t u y x 0 10,66 1-0,66=0, x0,34=0,68 1-0,68=0, x0,32=0,64 1-0,64=0, x0,36= ,72=0, x0,28=0,56 1-0,56=0, x0,44=0,88 1-0,88= x0,12=0,24 1-0,24=0, x0,76=1,52 1-1,52=-0, *0,52=-1,04 1-(-1,04)=2,04 Pilt ja näide: Vello Kukk (2004)
 Näide: tõsta kraanaga objekt võimalikult kiiresti ühest kohast teise kohta.")
47 Kui (üldist) tagasisidet kasutada ei saa Objekt ole jälgitav ei ole võimalik täpset mõõturit paigaldada Tuleb teha päriahel hästi täpne! Isejuhtivad sõidukid (eelkõige ümbruse tajumine) Näide: tõsta kraanaga objekt võimalikult kiiresti ühest kohast teise kohta. Probleemid: objekt hakkab võnkuma (kiikuma), tekivad painded, mehaanika loksub jne...
ISS0050 Mõõtmine
 MHK0120 SISSEJUHATUS MEHHATROONIKASSE Sügis 2018 Tagasiside Martin Jaanus U02-308 (hetkel veel) martin.jaanus@ttu.ee 620 2110, 56 91 31 93 Õppetöö : http://isc.ttu.ee Õppematerjalid : http://isc.ttu.ee/martin
MHK0120 SISSEJUHATUS MEHHATROONIKASSE Sügis 2018 Tagasiside Martin Jaanus U02-308 (hetkel veel) martin.jaanus@ttu.ee 620 2110, 56 91 31 93 Õppetöö : http://isc.ttu.ee Õppematerjalid : http://isc.ttu.ee/martin
DE_loeng5
 Digitaalelektroonika V loeng loogikalülitused KMOP transistoridega meeldetuletus loogikalülitused TTL baasil baaslülitus inverteri tunnusjooned ja hilistumine LS lülitus kolme olekuga TTL ja avatud kollektoriga
Digitaalelektroonika V loeng loogikalülitused KMOP transistoridega meeldetuletus loogikalülitused TTL baasil baaslülitus inverteri tunnusjooned ja hilistumine LS lülitus kolme olekuga TTL ja avatud kollektoriga
Automaatjuhtimise alused Automaatjuhtimissüsteemi kirjeldamine Loeng 2
 Automaatjuhtimise alused Automaatjuhtimissüsteemi kirjeldamine Loeng 2 Laplace'i teisendus Diferentsiaalvõrrandite lahendamine ilma tarkvara toeta on keeruline Üheks lahendamisvõtteks on Laplace'i teisendus
Automaatjuhtimise alused Automaatjuhtimissüsteemi kirjeldamine Loeng 2 Laplace'i teisendus Diferentsiaalvõrrandite lahendamine ilma tarkvara toeta on keeruline Üheks lahendamisvõtteks on Laplace'i teisendus
Matemaatilised meetodid loodusteadustes. I Kontrolltöö I järeltöö I variant 1. On antud neli vektorit: a = (2; 1; 0), b = ( 2; 1; 2), c = (1; 0; 2), d
, b = ( 2; 1; 2), c = (1; 0; 2), d") Matemaatilised meetodid loodusteadustes I Kontrolltöö I järeltöö I variant On antud neli vektorit: a (; ; ), b ( ; ; ), c (; ; ), d (; ; ) Leida vektorite a ja b vaheline nurk α ning vekoritele a, b ja
Matemaatilised meetodid loodusteadustes I Kontrolltöö I järeltöö I variant On antud neli vektorit: a (; ; ), b ( ; ; ), c (; ; ), d (; ; ) Leida vektorite a ja b vaheline nurk α ning vekoritele a, b ja
B120_10 estonian.cdr
 Alati seal, et teid aidata Registreerige oma toode ja otsige abi koduleheküljelt www.philips.com/welcome B120 Beebimonitor Küsimus? Kontakteeruge Philipsiga Eestikeelne kasutusjuhend 2 Valgussensor USB
Alati seal, et teid aidata Registreerige oma toode ja otsige abi koduleheküljelt www.philips.com/welcome B120 Beebimonitor Küsimus? Kontakteeruge Philipsiga Eestikeelne kasutusjuhend 2 Valgussensor USB
DIGITAALTEHNIKA DIGITAALTEHNIKA Arvusüsteemid Kümnendsüsteem Kahendsüsteem Kaheksandsüsteem Kuueteistkü
 DIGITAALTEHNIKA DIGITAALTEHNIKA... 1 1. Arvusüsteemid.... 2 1.1.Kümnendsüsteem....2 1.2.Kahendsüsteem.... 2 1.3.Kaheksandsüsteem.... 2 1.4.Kuueteistkümnendsüsteem....2 1.5.Kahendkodeeritud kümnendsüsteem
DIGITAALTEHNIKA DIGITAALTEHNIKA... 1 1. Arvusüsteemid.... 2 1.1.Kümnendsüsteem....2 1.2.Kahendsüsteem.... 2 1.3.Kaheksandsüsteem.... 2 1.4.Kuueteistkümnendsüsteem....2 1.5.Kahendkodeeritud kümnendsüsteem
Antennide vastastikune takistus
 Antennide vastastikune takistus Eelmises peatükis leidsime antenni kiirgustakistuse arvestamata antenni lähedal teisi objekte. Teised objektid, näiteks teised antennielemendid, võivad aga mõjutada antenni
Antennide vastastikune takistus Eelmises peatükis leidsime antenni kiirgustakistuse arvestamata antenni lähedal teisi objekte. Teised objektid, näiteks teised antennielemendid, võivad aga mõjutada antenni
Sissejuhatus mehhatroonikasse MHK0120
 Sissejuhatus mehhatroonikasse MHK0120 5. nädala loeng Raavo Josepson raavo.josepson@ttu.ee Pöördliikumine Kulgliikumine Kohavektor Ԧr Kiirus Ԧv = d Ԧr dt Kiirendus Ԧa = dv dt Pöördliikumine Pöördenurk
Sissejuhatus mehhatroonikasse MHK0120 5. nädala loeng Raavo Josepson raavo.josepson@ttu.ee Pöördliikumine Kulgliikumine Kohavektor Ԧr Kiirus Ԧv = d Ԧr dt Kiirendus Ԧa = dv dt Pöördliikumine Pöördenurk
TTÜ Robotiklubi
 Robot Igaühele Robootika ja elektroonika põhitõed Programmeerimine, Arduino Roboti disain ja ehituse algus Roboti ehitus ja jootmine Robotite programmeerimine Ülesande lahendamine Lõppvõistlus Sissejuhatus
Robot Igaühele Robootika ja elektroonika põhitõed Programmeerimine, Arduino Roboti disain ja ehituse algus Roboti ehitus ja jootmine Robotite programmeerimine Ülesande lahendamine Lõppvõistlus Sissejuhatus
Microsoft Word - Sobitusahelate_projekteerimine.doc
 Sobitusahelate projekteerimine Vaatleme 3 erinevat meetodit: koondparameetitega elementidel sobitamine häälestusribaga sobitamine veerandlainelõiguga sobitamine Sobitust võib vaadelda koormustakistuse
Sobitusahelate projekteerimine Vaatleme 3 erinevat meetodit: koondparameetitega elementidel sobitamine häälestusribaga sobitamine veerandlainelõiguga sobitamine Sobitust võib vaadelda koormustakistuse
Praks 1
 Biomeetria praks 6 Illustreeritud (mittetäielik) tööjuhend Eeltöö 1. Avage MS Excel is ankeedivastuseid sisaldav andmestik, 2. lisage uus tööleht, nimetage see ümber leheküljeks Praks6 ja 3. kopeerige
Biomeetria praks 6 Illustreeritud (mittetäielik) tööjuhend Eeltöö 1. Avage MS Excel is ankeedivastuseid sisaldav andmestik, 2. lisage uus tööleht, nimetage see ümber leheküljeks Praks6 ja 3. kopeerige
Mida me teame? Margus Niitsoo
 Mida me teame? Margus Niitsoo Tänased teemad Tagasisidest Õppimisest TÜ informaatika esmakursuslased Väljalangevusest Üle kogu Ülikooli TÜ informaatika + IT Kokkuvõte Tagasisidest NB! Tagasiside Tagasiside
Mida me teame? Margus Niitsoo Tänased teemad Tagasisidest Õppimisest TÜ informaatika esmakursuslased Väljalangevusest Üle kogu Ülikooli TÜ informaatika + IT Kokkuvõte Tagasisidest NB! Tagasiside Tagasiside
prakt8.dvi
 Diskreetne matemaatika 2012 8. praktikum Reimo Palm Praktikumiülesanded 1. Kas järgmised graafid on tasandilised? a) b) Lahendus. a) Jah. Vahetades kahe parempoolse tipu asukohad, saame graafi joonistada
Diskreetne matemaatika 2012 8. praktikum Reimo Palm Praktikumiülesanded 1. Kas järgmised graafid on tasandilised? a) b) Lahendus. a) Jah. Vahetades kahe parempoolse tipu asukohad, saame graafi joonistada
Praks 1
 Biomeetria praks 6 Illustreeritud (mittetäielik) tööjuhend Eeltöö 1. Avage MS Excel is oma kursuse ankeedivastuseid sisaldav andmestik, 2. lisage uus tööleht, nimetage see ümber leheküljeks Praks6 ja 3.
Biomeetria praks 6 Illustreeritud (mittetäielik) tööjuhend Eeltöö 1. Avage MS Excel is oma kursuse ankeedivastuseid sisaldav andmestik, 2. lisage uus tööleht, nimetage see ümber leheküljeks Praks6 ja 3.
Microsoft PowerPoint - IRZ0020_praktikum4.pptx
 IRZ0020 Kodeerimine i ja krüpteerimine praktikum 4 Julia Berdnikova, julia.berdnikova@ttu.ee www.lr.ttu.ee/~juliad l 1 Infoedastussüsteemi struktuurskeem Saatja Vastuvõtja Infoallikas Kooder Modulaator
IRZ0020 Kodeerimine i ja krüpteerimine praktikum 4 Julia Berdnikova, julia.berdnikova@ttu.ee www.lr.ttu.ee/~juliad l 1 Infoedastussüsteemi struktuurskeem Saatja Vastuvõtja Infoallikas Kooder Modulaator
Võrguinverterite valik ja kasutusala päikeseelektrijaamades Robert Mägi insener
 Võrguinverterite valik ja kasutusala päikeseelektrijaamades Robert Mägi insener Robert Mägi o Õpingud: Riga Technical University o Haridus: MSc (Electrical Engineering) MSc (Automatic Telecommunications)
Võrguinverterite valik ja kasutusala päikeseelektrijaamades Robert Mägi insener Robert Mägi o Õpingud: Riga Technical University o Haridus: MSc (Electrical Engineering) MSc (Automatic Telecommunications)
VL1_praks6_2010k
 Biomeetria praks 6 Illustreeritud (mittetäielik) tööjuhend Eeltöö 1. Avage MS Excel is oma kursuse ankeedivastuseid sisaldav andmestik, 2. lisage uus tööleht (Insert / Lisa -> Worksheet / Tööleht), nimetage
Biomeetria praks 6 Illustreeritud (mittetäielik) tööjuhend Eeltöö 1. Avage MS Excel is oma kursuse ankeedivastuseid sisaldav andmestik, 2. lisage uus tööleht (Insert / Lisa -> Worksheet / Tööleht), nimetage
Eesti keele võõrkeelena olümpiaadi lõppvoor 2013 Kõik ülesanded on siin lühendatult. Valikus on küsimusi mõlema vanuserühma töödest. Ülesanne 1. Kirju
 Eesti keele võõrkeelena olümpiaadi lõppvoor 2013 Kõik ülesanded on siin lühendatult. Valikus on küsimusi mõlema vanuserühma töödest. Ülesanne 1. Kirjuta sõna vastandsõna ehk antonüüm, nii et sõna tüvi
Eesti keele võõrkeelena olümpiaadi lõppvoor 2013 Kõik ülesanded on siin lühendatult. Valikus on küsimusi mõlema vanuserühma töödest. Ülesanne 1. Kirjuta sõna vastandsõna ehk antonüüm, nii et sõna tüvi
vv05lah.dvi
 IMO 05 Eesti võistkonna valikvõistlus 3. 4. aprill 005 Lahendused ja vastused Esimene päev 1. Vastus: π. Vaatleme esiteks juhtu, kus ringjooned c 1 ja c asuvad sirgest l samal pool (joonis 1). Olgu O 1
IMO 05 Eesti võistkonna valikvõistlus 3. 4. aprill 005 Lahendused ja vastused Esimene päev 1. Vastus: π. Vaatleme esiteks juhtu, kus ringjooned c 1 ja c asuvad sirgest l samal pool (joonis 1). Olgu O 1
Uudiseid k-meride abil bakterite leidmisest [Compatibility Mode]
![Uudiseid k-meride abil bakterite leidmisest [Compatibility Mode]](/thumbs/88/116394963.jpg "Uudiseid k-meride abil bakterite leidmisest [Compatibility Mode]") Uudiseid k-meride abil bakterite leidmisest CLARK: fast and accurate classification of metagenomic and genomic sequences using discriminative k-mers(2015) Rachid Ounit, Steve Wanamaker, Timothy J. Close
Uudiseid k-meride abil bakterite leidmisest CLARK: fast and accurate classification of metagenomic and genomic sequences using discriminative k-mers(2015) Rachid Ounit, Steve Wanamaker, Timothy J. Close
Microsoft Word - DB2_TECEfloor Raumthermostat Analog_EN_est
 1 TECEfloori toatermostaat Analog (RT-A ja RT-A HK) TECEfloori toatermostaat Analog on kvaliteetne toatermostaat ruumi temperatuuri registreerimiseks ja muuutmiseks ning pakub maksimaalset kasutusmugavust.
1 TECEfloori toatermostaat Analog (RT-A ja RT-A HK) TECEfloori toatermostaat Analog on kvaliteetne toatermostaat ruumi temperatuuri registreerimiseks ja muuutmiseks ning pakub maksimaalset kasutusmugavust.
raamat5_2013.pdf
 Peatükk 5 Prognoosiintervall ja Usaldusintervall 5.1 Prognoosiintervall Unustame hetkeks populatsiooni parameetrite hindamise ja pöördume tagasi üksikvaatluste juurde. On raske ennustada, milline on huvipakkuva
Peatükk 5 Prognoosiintervall ja Usaldusintervall 5.1 Prognoosiintervall Unustame hetkeks populatsiooni parameetrite hindamise ja pöördume tagasi üksikvaatluste juurde. On raske ennustada, milline on huvipakkuva
Slide 1
 ERAÜ XVII TALVEPÄEV 2015 Uue põlvkonna LDMOS transistorvõimendid 14.veebruar 2015 Mart Tagasaar, ES2NJ Sissejuhatus Alates 2010.aastast on turule ilmunud uue põlvkonna LDMOS transistorid võimsusega 600-1400W,
ERAÜ XVII TALVEPÄEV 2015 Uue põlvkonna LDMOS transistorvõimendid 14.veebruar 2015 Mart Tagasaar, ES2NJ Sissejuhatus Alates 2010.aastast on turule ilmunud uue põlvkonna LDMOS transistorid võimsusega 600-1400W,
Infix Operaatorid I Infix operaatorid (näiteks +) ja tüübid (näiteks ->) kirjutatakse argumentide vahele, mitte argumentide ette. Näiteks: 5 + 2, 2*pi
 ja tüübid (näiteks ->) kirjutatakse argumentide vahele, mitte argumentide ette. Näiteks: 5 + 2, 2*pi") Infix Operaatorid I Infix operaatorid (näiteks +) ja tüübid (näiteks ->) kirjutatakse argumentide vahele, mitte argumentide ette. Näiteks: 5 + 2, 2*pi*r^2, Float -> Int Infixoperaatori kasutamiseks prefix-vormis
Infix Operaatorid I Infix operaatorid (näiteks +) ja tüübid (näiteks ->) kirjutatakse argumentide vahele, mitte argumentide ette. Näiteks: 5 + 2, 2*pi*r^2, Float -> Int Infixoperaatori kasutamiseks prefix-vormis
3D mänguarenduse kursus (MTAT ) Loeng 3 Jaanus Uri 2013
 Loeng 3 Jaanus Uri 2013") 3D mänguarenduse kursus (MTAT.03.283) Loeng 3 Jaanus Uri 2013 Teemad Tee leidmine ja navigatsioon Andmete protseduuriline genereerimine Projektijuhtimine Tee leidmine Navigatsiooni võrgustik (navigation
3D mänguarenduse kursus (MTAT.03.283) Loeng 3 Jaanus Uri 2013 Teemad Tee leidmine ja navigatsioon Andmete protseduuriline genereerimine Projektijuhtimine Tee leidmine Navigatsiooni võrgustik (navigation
(10. kl. I kursus, Teisendamine, kiirusega, kesk.kiirusega \374lesanded)
") TEISENDAMINE Koostanud: Janno Puks 1. Massiühikute teisendamine Eesmärk: vajalik osata teisendada tonne, kilogramme, gramme ja milligramme. Teisenda antud massiühikud etteantud ühikusse: a) 0,25 t = kg
TEISENDAMINE Koostanud: Janno Puks 1. Massiühikute teisendamine Eesmärk: vajalik osata teisendada tonne, kilogramme, gramme ja milligramme. Teisenda antud massiühikud etteantud ühikusse: a) 0,25 t = kg
Abiarstide tagasiside 2016 Küsimustikule vastas 137 tudengit, kellest 81 (60%) olid V kursuse ning 56 (40%) VI kursuse tudengid. Abiarstina olid vasta
 olid V kursuse ning 56 (40%) VI kursuse tudengid. Abiarstina olid vasta") Abiarstide tagasiside 2016 Küsimustikule vastas 137 tudengit, kellest 81 (60%) olid V kursuse ning 56 (40%) VI kursuse tudengid. Abiarstina olid vastanutest töötanud 87 tudengit ehk 64%, kellest 79 (91%)
Abiarstide tagasiside 2016 Küsimustikule vastas 137 tudengit, kellest 81 (60%) olid V kursuse ning 56 (40%) VI kursuse tudengid. Abiarstina olid vastanutest töötanud 87 tudengit ehk 64%, kellest 79 (91%)
Matemaatiline analüüs IV 1 3. Mitme muutuja funktsioonide diferentseerimine 1. Mitme muutuja funktsiooni osatuletised Üleminekul ühe muutuja funktsioo
 Matemaatiline analüüs IV 1 3. Mitme muutuja funktsioonide diferentseerimine 1. Mitme muutuja funktsiooni osatuletised Üleminekul üe muutuja funktsioonidelt m muutuja funktsioonidele, kus m, 3,..., kerkib
Matemaatiline analüüs IV 1 3. Mitme muutuja funktsioonide diferentseerimine 1. Mitme muutuja funktsiooni osatuletised Üleminekul üe muutuja funktsioonidelt m muutuja funktsioonidele, kus m, 3,..., kerkib
QUANTUM SPIN-OFF - Experiment UNIVERSITEIT ANTWERPEN
 1 Kvantfüüsika Tillukeste asjade füüsika, millel on hiiglaslikud rakendusvõimalused 3. osa: PRAKTILISED TEGEVUSED Elektronide difraktsioon Projekti Quantum Spin-Off rahastab Euroopa Liit programmi LLP
1 Kvantfüüsika Tillukeste asjade füüsika, millel on hiiglaslikud rakendusvõimalused 3. osa: PRAKTILISED TEGEVUSED Elektronide difraktsioon Projekti Quantum Spin-Off rahastab Euroopa Liit programmi LLP
Praks 1
 Biomeetria praks 3 Illustreeritud (mittetäielik) tööjuhend Eeltöö 1. Avage MS Excel is oma kursuse ankeedivastuseid sisaldav andmestik, 2. lisage uus tööleht, 3. nimetage see ümber leheküljeks Praks3 ja
Biomeetria praks 3 Illustreeritud (mittetäielik) tööjuhend Eeltöö 1. Avage MS Excel is oma kursuse ankeedivastuseid sisaldav andmestik, 2. lisage uus tööleht, 3. nimetage see ümber leheküljeks Praks3 ja
8.klass 4 tundi nädalas, kokku 140 tundi Hulkliikmed ( 45 tundi) Õppesisu Hulkliige. Hulkliikmete liitmine ja lahutamine ning korrutamine ja jagamine
 Õppesisu Hulkliige. Hulkliikmete liitmine ja lahutamine ning korrutamine ja jagamine") 8.klass 4 tundi nädalas, kokku 140 tundi Hulkliikmed ( 45 tundi) Hulkliige. Hulkliikmete liitmine ja lahutamine ning korrutamine ja jagamine üksliikmega. Hulkliikme tegurdamine ühise teguri sulgudest väljatoomisega.
8.klass 4 tundi nädalas, kokku 140 tundi Hulkliikmed ( 45 tundi) Hulkliige. Hulkliikmete liitmine ja lahutamine ning korrutamine ja jagamine üksliikmega. Hulkliikme tegurdamine ühise teguri sulgudest väljatoomisega.
HCB_hinnakiri2017_kodukale
 Betooni baashinnakiri Hinnakiri kehtib alates 01.04.2016 Töödeldavus S3 Töödeldavus S4 / m 3 /m 3 km-ga / m 3 /m 3 km-ga C 8/10 69 83 71 85 C 12/15 73 88 75 90 C 16/20 75 90 77 92 C 20/25 78 94 80 96 C
Betooni baashinnakiri Hinnakiri kehtib alates 01.04.2016 Töödeldavus S3 Töödeldavus S4 / m 3 /m 3 km-ga / m 3 /m 3 km-ga C 8/10 69 83 71 85 C 12/15 73 88 75 90 C 16/20 75 90 77 92 C 20/25 78 94 80 96 C
HCB_hinnakiri2018_kodukale
 Betooni baashinnakiri Hinnakiri kehtib alates 01.01.2018 Töödeldavus S3 Töödeldavus S4 / m 3 /m 3 km-ga / m 3 /m 3 km-ga C 8/10 73 87 75 89 C 12/15 77 92 79 94 C 16/20 79 94 81 96 C 20/25 82 98 84 100
Betooni baashinnakiri Hinnakiri kehtib alates 01.01.2018 Töödeldavus S3 Töödeldavus S4 / m 3 /m 3 km-ga / m 3 /m 3 km-ga C 8/10 73 87 75 89 C 12/15 77 92 79 94 C 16/20 79 94 81 96 C 20/25 82 98 84 100
P9_10 estonian.cdr
 Registreerige oma toode ja saage abi kodulehelt www.philips.com/welcome P9/10 Eestikeelne kasutusjuhend 2 Ühendage P9 kõlar Bluetooth ühenduse kaudu oma Bluetooth seadmega, nagu näiteks ipadiga, iphone'iga,
Registreerige oma toode ja saage abi kodulehelt www.philips.com/welcome P9/10 Eestikeelne kasutusjuhend 2 Ühendage P9 kõlar Bluetooth ühenduse kaudu oma Bluetooth seadmega, nagu näiteks ipadiga, iphone'iga,
Õppimine Anne Villems, Margus Niitsoo ja Konstantin Tretjakov
 Õppimine Anne Villems, Margus Niitsoo ja Konstantin Tretjakov Kava Kuulame Annet Essed ja Felder Õppimise teooriad 5 Eduka õppe reeglit 5 Olulisemat oskust Anne Loeng Mida uut saite teada andmebaasidest?
Õppimine Anne Villems, Margus Niitsoo ja Konstantin Tretjakov Kava Kuulame Annet Essed ja Felder Õppimise teooriad 5 Eduka õppe reeglit 5 Olulisemat oskust Anne Loeng Mida uut saite teada andmebaasidest?
Tarkvaraline raadio Software defined radio (SDR) Jaanus Kalde 2017
 Jaanus Kalde 2017") Tarkvaraline raadio Software defined radio (SDR) Jaanus Kalde 2017 Sissejuhatus Raadiosidest üldiselt Tarkvaraline raadio Kuidas alustada 2 Raadioside Palju siinussignaale õhus Info edastamiseks moduleerid
Tarkvaraline raadio Software defined radio (SDR) Jaanus Kalde 2017 Sissejuhatus Raadiosidest üldiselt Tarkvaraline raadio Kuidas alustada 2 Raadioside Palju siinussignaale õhus Info edastamiseks moduleerid
6 tsooniga keskus WFHC MASTER RF 868MHz & 4 või 6 tsooniga alaseade SLAVE RF KASUTUSJUHEND 6 tsooniga WFHC RF keskus & 4 või 6 tsooniga alaseade SLAVE
 6 tsooniga keskus WFHC MASTER RF 868MHz & 4 või 6 tsooniga alaseade SLAVE RF KASUTUSJUHEND 6 tsooniga WFHC RF keskus & 4 või 6 tsooniga alaseade SLAVE RF 868MHz 3-6 EE 1. KASUTUSJUHEND 6 tsooniga WFHC
6 tsooniga keskus WFHC MASTER RF 868MHz & 4 või 6 tsooniga alaseade SLAVE RF KASUTUSJUHEND 6 tsooniga WFHC RF keskus & 4 või 6 tsooniga alaseade SLAVE RF 868MHz 3-6 EE 1. KASUTUSJUHEND 6 tsooniga WFHC
Statistiline andmetöötlus
 Biomeetria Kahe arvtuuse ühie käitumie, regressiooaalüüs Lieaare regressiooaalüüs Millal kasutada ja mida äitab? Kasutatakse progoosimaks ühe arvtuuse väärtusi teis(t)e järgi. Rümba hid, EEK/kg ( y ) Regressiooivõrrad:
Biomeetria Kahe arvtuuse ühie käitumie, regressiooaalüüs Lieaare regressiooaalüüs Millal kasutada ja mida äitab? Kasutatakse progoosimaks ühe arvtuuse väärtusi teis(t)e järgi. Rümba hid, EEK/kg ( y ) Regressiooivõrrad:
PÄRNU TÄISKASVANUTE GÜMNAASIUM ESITLUSE KOOSTAMISE JUHEND Pärnu 2019
 PÄRNU TÄISKASVANUTE GÜMNAASIUM ESITLUSE KOOSTAMISE JUHEND Pärnu 2019 SISUKORD 1. SLAIDIESITLUS... 3 1.1. Esitlustarkvara... 3 1.2. Slaidiesitluse sisu... 3 1.3. Slaidiesitluse vormistamine... 4 1.3.1 Slaidid...
PÄRNU TÄISKASVANUTE GÜMNAASIUM ESITLUSE KOOSTAMISE JUHEND Pärnu 2019 SISUKORD 1. SLAIDIESITLUS... 3 1.1. Esitlustarkvara... 3 1.2. Slaidiesitluse sisu... 3 1.3. Slaidiesitluse vormistamine... 4 1.3.1 Slaidid...
Tallinna Ülikool/ Haridusteaduste instituut/ Üliõpilase eneseanalüüsi vorm õpetajakutse taotlemiseks (tase 7) ÜLIÕPILASE PÄDEVUSPÕHINE ENESEANALÜÜS Ül
 ÜLIÕPILASE PÄDEVUSPÕHINE ENESEANALÜÜS Ül") ÜLIÕPILASE PÄDEVUSPÕHINE ENESEANALÜÜS Üliõpilase nimi: Kuupäev: Pädevus Hindamiskriteerium Eneseanalüüs koos näidetega (sh vajadusel viited teoreetilistel ainekursustel tehtule) B.2.1 Õpi- ja õpetamistegevuse
ÜLIÕPILASE PÄDEVUSPÕHINE ENESEANALÜÜS Üliõpilase nimi: Kuupäev: Pädevus Hindamiskriteerium Eneseanalüüs koos näidetega (sh vajadusel viited teoreetilistel ainekursustel tehtule) B.2.1 Õpi- ja õpetamistegevuse
Õppekava arendus
 Õppekava arendus Ülle Liiber Õppekava kui kokkulepe ja ajastu peegeldus Riiklik õppekava on peegeldus sellest ajast, milles see on koostatud ja kirjutatud valitsevast mõtteviisist ja inimkäsitusest, pedagoogilistest
Õppekava arendus Ülle Liiber Õppekava kui kokkulepe ja ajastu peegeldus Riiklik õppekava on peegeldus sellest ajast, milles see on koostatud ja kirjutatud valitsevast mõtteviisist ja inimkäsitusest, pedagoogilistest
6
 TALLINNA ÕISMÄE GÜMNAASIUMI ÕPPESUUNDADE KIRJELDUSED JA NENDE TUNNIJAOTUSPLAAN GÜMNAASIUMIS Õppesuundade kirjeldused Kool on valikkursustest kujundanud õppesuunad, võimaldades õppe kolmes õppesuunas. Gümnaasiumi
TALLINNA ÕISMÄE GÜMNAASIUMI ÕPPESUUNDADE KIRJELDUSED JA NENDE TUNNIJAOTUSPLAAN GÜMNAASIUMIS Õppesuundade kirjeldused Kool on valikkursustest kujundanud õppesuunad, võimaldades õppe kolmes õppesuunas. Gümnaasiumi
PowerPoint Presentation
 Marek Alliksoo Export Sales Manager 01 November 2018 Targa linna lahendused linnaplaneerimises Tark linn Tark asjade internet (Tark Pilv) Tark automatiseeritus Tark energia Tark juhtimine Tark kodanik
Marek Alliksoo Export Sales Manager 01 November 2018 Targa linna lahendused linnaplaneerimises Tark linn Tark asjade internet (Tark Pilv) Tark automatiseeritus Tark energia Tark juhtimine Tark kodanik
lvk04lah.dvi
 Lahtine matemaatikaülesannete lahendamise võistlus. veebruaril 004. a. Lahendused ja vastused Noorem rühm 1. Vastus: a) jah; b) ei. Lahendus 1. a) Kuna (3m+k) 3 7m 3 +7m k+9mk +k 3 3M +k 3 ning 0 3 0,
Lahtine matemaatikaülesannete lahendamise võistlus. veebruaril 004. a. Lahendused ja vastused Noorem rühm 1. Vastus: a) jah; b) ei. Lahendus 1. a) Kuna (3m+k) 3 7m 3 +7m k+9mk +k 3 3M +k 3 ning 0 3 0,
Elisa Ring Elisa Ringi mobiilirakendus Versioon
 Elisa Ring Elisa Ringi mobiilirakendus Versioon 1.0.85 15.01.2019 1 Elisa Ring... 1 1. Ülevaade... 3 1.1. Kirjeldus... 3 1.2. Tehnilised tingimused... 3 1.3. Kasutuselevõtt ja sisselogimine... 3 2. Rakenduse
Elisa Ring Elisa Ringi mobiilirakendus Versioon 1.0.85 15.01.2019 1 Elisa Ring... 1 1. Ülevaade... 3 1.1. Kirjeldus... 3 1.2. Tehnilised tingimused... 3 1.3. Kasutuselevõtt ja sisselogimine... 3 2. Rakenduse
Microsoft Word - Suure thermori pass2.doc
 PAIGALDAMINE KASUTAMINE HOOLDUS SUUREMAHULISED 500-3000 L VEEBOILERID Need on sukel-ja keraamilise küttekehaga elektrilised veesoojendid. Võimalikud on variandid kus täiendavalt küttekehale on ka kesküttesüsteemiga
PAIGALDAMINE KASUTAMINE HOOLDUS SUUREMAHULISED 500-3000 L VEEBOILERID Need on sukel-ja keraamilise küttekehaga elektrilised veesoojendid. Võimalikud on variandid kus täiendavalt küttekehale on ka kesküttesüsteemiga
Tootmine_ja_tootlikkus
 TOOTMINE JA TOOTLIKKUS Juhan Lehepuu Leiame vastused küsimustele: Mis on sisemajanduse koguprodukt ja kuidas seda mõõdetakse? Kuidas mõjutavad sisemajanduse koguprodukti muutused elatustaset? Miks sõltub
TOOTMINE JA TOOTLIKKUS Juhan Lehepuu Leiame vastused küsimustele: Mis on sisemajanduse koguprodukt ja kuidas seda mõõdetakse? Kuidas mõjutavad sisemajanduse koguprodukti muutused elatustaset? Miks sõltub
Ruutvormid Denitsioon 1. P n Ütleme, et avaldis i;j=1 a ijx i x j ; kus a ij = a ji ; a ij 2 K ja K on korpus, on ruutvorm üle korpuse K muutujate x 1
 Ruutvormid Denitsioon. P n Ütleme, et avaldis i;j= a ijx i x j ; kus a ij = a ji ; a ij K ja K on korus, on ruutvorm üle koruse K muutujate x ;;x n suhtes. Maatriksit =(a ij ) nimetame selle ruutvormi
Ruutvormid Denitsioon. P n Ütleme, et avaldis i;j= a ijx i x j ; kus a ij = a ji ; a ij K ja K on korus, on ruutvorm üle koruse K muutujate x ;;x n suhtes. Maatriksit =(a ij ) nimetame selle ruutvormi
efo09v2pke.dvi
 Eesti koolinoorte 56. füüsikaolümpiaad 17. jaanuar 2009. a. Piirkondlik voor. Põhikooli ülesanded 1. (VÄRVITILGAD LAUAL) Ühtlaselt ja sirgjooneliselt liikuva horisontaalse laua kohal on kaks paigalseisvat
Eesti koolinoorte 56. füüsikaolümpiaad 17. jaanuar 2009. a. Piirkondlik voor. Põhikooli ülesanded 1. (VÄRVITILGAD LAUAL) Ühtlaselt ja sirgjooneliselt liikuva horisontaalse laua kohal on kaks paigalseisvat
ITI Loogika arvutiteaduses
 Predikaatloogika Predikaatloogika on lauseloogika tugev laiendus. Predikaatloogikas saab nimetada asju ning rääkida nende omadustest. Väljendusvõimsuselt on predikaatloogika seega oluliselt peenekoelisem
Predikaatloogika Predikaatloogika on lauseloogika tugev laiendus. Predikaatloogikas saab nimetada asju ning rääkida nende omadustest. Väljendusvõimsuselt on predikaatloogika seega oluliselt peenekoelisem
Eesti koolinoorte LIII matemaatikaolümpiaad 28. jaanuar 2006 Piirkonnavoor Hindamisjuhised Lp hindaja! 1. Juhime Teie tähelepanu sellele, et alljärgne
 Eesti koolinoorte LIII matemaatikaolümpiaad 28. jaanuar 2006 Piirkonnavoor Hindamisjuhised Lp hindaja! 1. Juhime Teie tähelepanu sellele, et alljärgnevas on 7. 9. klasside olümpiaadi I osa (testi) ning
Eesti koolinoorte LIII matemaatikaolümpiaad 28. jaanuar 2006 Piirkonnavoor Hindamisjuhised Lp hindaja! 1. Juhime Teie tähelepanu sellele, et alljärgnevas on 7. 9. klasside olümpiaadi I osa (testi) ning
Kuidas vahetada esimesi suspensiooni vedrusid autol VOLKSWAGEN TOURAN 1
 Sooritage asendamine järgnevas järjekorras: 1 Vahetage Volkswagen Touran 1 vedrud paarikaupa. 2 Pingutage seisupiduri hooba. 3 Asetage tõkiskingad tagumiste rataste taha. Lõdvendage ratta kinnituspolte.
Sooritage asendamine järgnevas järjekorras: 1 Vahetage Volkswagen Touran 1 vedrud paarikaupa. 2 Pingutage seisupiduri hooba. 3 Asetage tõkiskingad tagumiste rataste taha. Lõdvendage ratta kinnituspolte.
Treeningvõistlus Balti tee 2014 võistkonnale Tartus, 4. novembril 2014 Vastused ja lahendused 1. Vastus: 15, 18, 45 ja kõik 0-ga lõppevad arvud. Olgu
 Treeningvõistlus Balti tee 014 võistkonnale Tartus, 4. novembril 014 Vastused ja lahendused 1. Vastus: 15, 18, 45 ja kõik 0-ga lõppevad arvud. Olgu b arvu k üheliste number ning a arv, mille saame arvust
Treeningvõistlus Balti tee 014 võistkonnale Tartus, 4. novembril 014 Vastused ja lahendused 1. Vastus: 15, 18, 45 ja kõik 0-ga lõppevad arvud. Olgu b arvu k üheliste number ning a arv, mille saame arvust
Ppt [Read-Only]
![Ppt [Read-Only]](/thumbs/98/138481535.jpg "Ppt [Read-Only]") EL 2020 strateegia eesmärkidest, mis puudutab varajast koolist väljalangemist ja selle vähendamist EL 2020 strateegia eesmärkidest, mis puudutab madala haridustasemega noorte osakaalu vähendamist Madal
EL 2020 strateegia eesmärkidest, mis puudutab varajast koolist väljalangemist ja selle vähendamist EL 2020 strateegia eesmärkidest, mis puudutab madala haridustasemega noorte osakaalu vähendamist Madal
SQL
 SQL Kuues loeng 3GL inside 4GL Protseduurid Funktsioonid Tavalised Funktsioonid (üks väljund) Ilma väljundita Protseduurid Viitargumentide kasutamise võimalus Tabel-väljundiga Protseduurid Create function
SQL Kuues loeng 3GL inside 4GL Protseduurid Funktsioonid Tavalised Funktsioonid (üks väljund) Ilma väljundita Protseduurid Viitargumentide kasutamise võimalus Tabel-väljundiga Protseduurid Create function
Manuals Generator
 Sooritage asendamine järgnevas järjekorras: 1 Vahetage vedrud paarikaupa. Pingutage seisupiduri hooba. 2 3 Asetage tõkiskingad tagumiste rataste taha. Lõdvendage ratta kinnituspolte. 4 5 Tõstke esimest
Sooritage asendamine järgnevas järjekorras: 1 Vahetage vedrud paarikaupa. Pingutage seisupiduri hooba. 2 3 Asetage tõkiskingad tagumiste rataste taha. Lõdvendage ratta kinnituspolte. 4 5 Tõstke esimest
Õppematerjalide esitamine Moodle is (alustajatele) seminar sarjas Lõunatund e-õppega 12. septembril 2017 õppedisainerid Ly Sõõrd (LT valdkond) ja Dian
 seminar sarjas Lõunatund e-õppega 12. septembril 2017 õppedisainerid Ly Sõõrd (LT valdkond) ja Dian") Õppematerjalide esitamine Moodle is (alustajatele) seminar sarjas Lõunatund e-õppega 12. septembril 2017 õppedisainerid Ly Sõõrd (LT valdkond) ja Diana Lõvi (SV valdkond) Järgmised e-lõunad: 10. oktoober
Õppematerjalide esitamine Moodle is (alustajatele) seminar sarjas Lõunatund e-õppega 12. septembril 2017 õppedisainerid Ly Sõõrd (LT valdkond) ja Diana Lõvi (SV valdkond) Järgmised e-lõunad: 10. oktoober
Kuidas ärgitada loovust?
 Harjumaa ettevõtluspäev äriideed : elluviimine : edulood : turundus : eksport Äriideede genereerimine Harald Lepisk OPPORTUNITYISNOWHERE Ideed on nagu lapsed Kas tead kedagi, kelle vastsündinud laps on
Harjumaa ettevõtluspäev äriideed : elluviimine : edulood : turundus : eksport Äriideede genereerimine Harald Lepisk OPPORTUNITYISNOWHERE Ideed on nagu lapsed Kas tead kedagi, kelle vastsündinud laps on
Word Pro - digiTUNDkaug.lwp
 / näide: \ neeldumisseadusest x w x y = x tuleneb, et neeldumine toimub ka näiteks avaldises x 2 w x 2 x 5 : x 2 w x 2 x 5 = ( x 2 ) w ( x 2 ) [ x 5 ] = x 2 Digitaalskeemide optimeerimine (lihtsustamine)
/ näide: \ neeldumisseadusest x w x y = x tuleneb, et neeldumine toimub ka näiteks avaldises x 2 w x 2 x 5 : x 2 w x 2 x 5 = ( x 2 ) w ( x 2 ) [ x 5 ] = x 2 Digitaalskeemide optimeerimine (lihtsustamine)
IMO 2000 Eesti võistkonna valikvõistlus Tartus, aprillil a. Ülesannete lahendused Esimene päev 1. Olgu vaadeldavad arvud a 1, a 2, a 3,
 IMO 000 Eesti võistkonna valikvõistlus Tartus, 19. 0. aprillil 000. a. Ülesannete lahendused Esimene päev 1. Olgu vaadeldavad arvud a 1, a, a 3, a 4, a 5. Paneme tähele, et (a 1 + a + a 3 a 4 a 5 ) (a
IMO 000 Eesti võistkonna valikvõistlus Tartus, 19. 0. aprillil 000. a. Ülesannete lahendused Esimene päev 1. Olgu vaadeldavad arvud a 1, a, a 3, a 4, a 5. Paneme tähele, et (a 1 + a + a 3 a 4 a 5 ) (a
XV kursus
 KORDAMINE RIIGIEKSAMIKS VI FUNKTSIOONID JA NENDE GRAAFIKUD. TULETISE RAKENDUSED.. Funktsiooni määramispiirkonna ( X ) moodustavad argumendi () väärtused, mille korral funktsiooni väärtus (y) on eeskirjaga
KORDAMINE RIIGIEKSAMIKS VI FUNKTSIOONID JA NENDE GRAAFIKUD. TULETISE RAKENDUSED.. Funktsiooni määramispiirkonna ( X ) moodustavad argumendi () väärtused, mille korral funktsiooni väärtus (y) on eeskirjaga
E-õppe ajalugu
 Koolituskeskkonnad MTAT.03.142 avaloeng Anne Villems September 2014.a. Põhiterminid Koolituskeskkonnad (Learning environments) IKT hariduses (ICT in education) E-õpe (e-learning) Kaugõpe (distance learning)
Koolituskeskkonnad MTAT.03.142 avaloeng Anne Villems September 2014.a. Põhiterminid Koolituskeskkonnad (Learning environments) IKT hariduses (ICT in education) E-õpe (e-learning) Kaugõpe (distance learning)
Relatsiooniline andmebaaside teooria II. 6. Loeng
 Relatsiooniline andmebaaside teooria II. 5. Loeng Anne Villems ATI Loengu plaan Sõltuvuste pere Relatsiooni dekompositsioon Kadudeta ühendi omadus Sõltuvuste pere säilitamine Kui jõuame, siis ka normaalkujud
Relatsiooniline andmebaaside teooria II. 5. Loeng Anne Villems ATI Loengu plaan Sõltuvuste pere Relatsiooni dekompositsioon Kadudeta ühendi omadus Sõltuvuste pere säilitamine Kui jõuame, siis ka normaalkujud
Microsoft PowerPoint - Kindlustuskelmus [Compatibility Mode]
![Microsoft PowerPoint - Kindlustuskelmus [Compatibility Mode]](/thumbs/88/116492434.jpg "Microsoft PowerPoint - Kindlustuskelmus [Compatibility Mode]") Olavi-Jüri Luik Vandeadvokaat Advokaadibüroo LEXTAL 21.veebruar 2014 i iseloomustab Robin Hood ilik käitumine kindlustus on rikas ja temalt raha võtmine ei ole kuritegu. Näiteks näitavad Saksamaal ja USA-s
Olavi-Jüri Luik Vandeadvokaat Advokaadibüroo LEXTAL 21.veebruar 2014 i iseloomustab Robin Hood ilik käitumine kindlustus on rikas ja temalt raha võtmine ei ole kuritegu. Näiteks näitavad Saksamaal ja USA-s
1 / loeng Tekstitöötlus Sisend/väljund Teksti lugemine Sõnad
 1 / 16 7. loeng Tekstitöötlus Sisend/väljund Teksti lugemine Sõnad 2 / 16 Sisend/väljund vaikimisi: Termid: read, write?-read(x). : 2+3. X = 2+3.?-write(2+3). 2+3 true. Jooksva sisendi vaatamine: seeing?-
1 / 16 7. loeng Tekstitöötlus Sisend/väljund Teksti lugemine Sõnad 2 / 16 Sisend/väljund vaikimisi: Termid: read, write?-read(x). : 2+3. X = 2+3.?-write(2+3). 2+3 true. Jooksva sisendi vaatamine: seeing?-
Matemaatika ainekava 8.klass 4 tundi nädalas, kokku 140 tundi Kuu Õpitulemus Õppesisu Algebra (65 t.) Geomeetria (60 t.) Ajavaru kordamiseks (15 õppet
 Geomeetria (60 t.) Ajavaru kordamiseks (15 õppet") Matemaatika ainekava 8.klass 4 tundi nädalas, kokku 140 tundi Algebra (65 t.) Geomeetria (60 t.) Ajavaru kordamiseks (15 õppetundi) septembernovember korrastab hulkliikmeid Hulkliige. Tehted liidab, lahutab
Matemaatika ainekava 8.klass 4 tundi nädalas, kokku 140 tundi Algebra (65 t.) Geomeetria (60 t.) Ajavaru kordamiseks (15 õppetundi) septembernovember korrastab hulkliikmeid Hulkliige. Tehted liidab, lahutab
Microsoft Word - Pt4.doc
 4 OSTSILLOGRAAF 4.1 STRUKTUUR Ossillograaf seade elekrivõnkumise (pinge) ajalise kuju jälgimiseks ja mõõmiseks. Liigius: analoogossillograafid ja digiaalossillograafid. a) Analoogossillograaf S CRT S&K
4 OSTSILLOGRAAF 4.1 STRUKTUUR Ossillograaf seade elekrivõnkumise (pinge) ajalise kuju jälgimiseks ja mõõmiseks. Liigius: analoogossillograafid ja digiaalossillograafid. a) Analoogossillograaf S CRT S&K
normaali
 AS TEEKARU T-2 Tallinn-Tartu-Võru Luhamaa mnt kiirustabloode mõõtetulemused enne ja pärast märgi aktiveerimist. Vahearuanne Tallinn 2 AS TEEKARU LIIKLUSOSAKOND T-2 Tallinn-Tartu-Võru Luhamaa mnt kiirustabloode
AS TEEKARU T-2 Tallinn-Tartu-Võru Luhamaa mnt kiirustabloode mõõtetulemused enne ja pärast märgi aktiveerimist. Vahearuanne Tallinn 2 AS TEEKARU LIIKLUSOSAKOND T-2 Tallinn-Tartu-Võru Luhamaa mnt kiirustabloode
sojateadlane_4.indd
 KAITSEVÄE ÜHENDATUD ÕPPEASUTUSTE PÕHIKURSUSTE KADETTIDE KOGEMUSED, USKUMUSED JA ETTEPANEKUD SEOSES NUTIVAHENDITE KASUTAMISEGA ÕPPETEGEVUSES 1 Triinu Soomere, Liina Lepp, Marvi Remmik, Äli Leijen Võtmesõnad:
KAITSEVÄE ÜHENDATUD ÕPPEASUTUSTE PÕHIKURSUSTE KADETTIDE KOGEMUSED, USKUMUSED JA ETTEPANEKUD SEOSES NUTIVAHENDITE KASUTAMISEGA ÕPPETEGEVUSES 1 Triinu Soomere, Liina Lepp, Marvi Remmik, Äli Leijen Võtmesõnad:
(Microsoft Word - Matsalu Veev\344rk AS aktsion\344ride leping \(Lisa D\) Valemid )
 Valemid )") 1(6) 1. Vee- ja kanalisatsiooniteenuse hinna kujundamise põhimõtted Aktsiaselts tegevuskulude arvestuse aluseks on auditeeritud ja kinnitatud aastaaruanne. Hinnakujunduse analüüsis kasutatakse Aktsiaseltsi
1(6) 1. Vee- ja kanalisatsiooniteenuse hinna kujundamise põhimõtted Aktsiaselts tegevuskulude arvestuse aluseks on auditeeritud ja kinnitatud aastaaruanne. Hinnakujunduse analüüsis kasutatakse Aktsiaseltsi
Microsoft PowerPoint - TEUK ettekanne pptx
 Hinnanguliselt on võimalik rajada kaugkütte baasil koostootmisjaamu võimsusega 2...3 MW Viljandis, Kuressaares, Võrus, Haapsalus, Paides, Rakveres, Valgas, Jõgeval, Tartuskokku ca 20 MW Tööstusettevõtete
Hinnanguliselt on võimalik rajada kaugkütte baasil koostootmisjaamu võimsusega 2...3 MW Viljandis, Kuressaares, Võrus, Haapsalus, Paides, Rakveres, Valgas, Jõgeval, Tartuskokku ca 20 MW Tööstusettevõtete
X Window System tuntud kui: X11, X, X-Windows akendussüsteem/akendesüsteem rastergraafikat toetavatele ekraanidele UNIX-maailmas väga levinud mitmesug
 X Window System tuntud kui: X11, X, X-Windows akendussüsteem/akendesüsteem rastergraafikat toetavatele ekraanidele UNIX-maailmas väga levinud mitmesugused realisatsioonid ka Windowsile erinevad realisatsioonid
X Window System tuntud kui: X11, X, X-Windows akendussüsteem/akendesüsteem rastergraafikat toetavatele ekraanidele UNIX-maailmas väga levinud mitmesugused realisatsioonid ka Windowsile erinevad realisatsioonid
(Microsoft PowerPoint - Investeerimishoius_Uus_Maailm_alusvara_\374levaadeToim.ppt)
") 02 6 Investeerimishoius Uus Maailm Aktsiainvesteeringu tootlus, hoiuse turvalisus 1 Investeerimishoius UUS MAAILM Müügiperiood 07.05.2008 02.06.2008 Hoiuperiood 03.06.2008 14.06.2011 Hoiuvaluuta Eesti
02 6 Investeerimishoius Uus Maailm Aktsiainvesteeringu tootlus, hoiuse turvalisus 1 Investeerimishoius UUS MAAILM Müügiperiood 07.05.2008 02.06.2008 Hoiuperiood 03.06.2008 14.06.2011 Hoiuvaluuta Eesti
Microsoft Word - 1-1_toojuhend.doc
 1.1. ELEKTROSTAATILISE VÄLJA UURIMINE 1. Tööülesanne Erineva kujuga elektroodide elektrostaatilise välja ekvipotentsiaalpindade leidmine elektrolüüdivanni meetodil. Potentsiaali jaotuse leidmine arvutil
1.1. ELEKTROSTAATILISE VÄLJA UURIMINE 1. Tööülesanne Erineva kujuga elektroodide elektrostaatilise välja ekvipotentsiaalpindade leidmine elektrolüüdivanni meetodil. Potentsiaali jaotuse leidmine arvutil
PowerPoint Presentation
 TeaMe programm 2009-2015 7. mai 2015 Eesmärgid Suurendada noorte huvi teaduse ja tehnoloogia ning nendega seotud elukutsete vastu Laiendada Eesti teadusmeedia arenguvõimalusi Levitada täppis- ja loodusteaduslikku
TeaMe programm 2009-2015 7. mai 2015 Eesmärgid Suurendada noorte huvi teaduse ja tehnoloogia ning nendega seotud elukutsete vastu Laiendada Eesti teadusmeedia arenguvõimalusi Levitada täppis- ja loodusteaduslikku
ÕPETAJATE OSKUSED PIAAC ANDMETE BAASIL Aune Valk PIAAC (Programme for the International Assessment of Adult Competencies) uuringu raames va
 uuringu raames va") ÕPETAJATE OSKUSED PIAAC ANDMETE BAASIL 10.12.2013 Aune Valk PIAAC (Programme for the International Assessment of Adult Competencies) uuringu raames valmis väga rikas andmebaas, mis annab võimaluse uurida
ÕPETAJATE OSKUSED PIAAC ANDMETE BAASIL 10.12.2013 Aune Valk PIAAC (Programme for the International Assessment of Adult Competencies) uuringu raames valmis väga rikas andmebaas, mis annab võimaluse uurida
E-õppe tehnoloogiad kõrgkoolis E-learning Technologies in Higher Education MTAT
 Interaktiivsusest e-õppes Anne Villems Seneca (4.-56.a. m.a.j.) Mitte sellepärast me ei söanda uusi asju katsetada, et asjad on keerulised, vaid kuna me ei söanda neid katsetada, on nad keerulised. It
Interaktiivsusest e-õppes Anne Villems Seneca (4.-56.a. m.a.j.) Mitte sellepärast me ei söanda uusi asju katsetada, et asjad on keerulised, vaid kuna me ei söanda neid katsetada, on nad keerulised. It
TELE2 SEADMEKINDLUSTUSE tingimused TH-TELE Vaata lisaks TELE2 SEADMEKINDLUSTUSE TINGIMUSED TH-TELE
 TELE2 SEADMEKINDLUSTUSE tingimused TH-TELE2 20191 Vaata lisaks www.tele2.ee TELE2 SEADMEKINDLUSTUSE TINGIMUSED TH-TELE2 20191 1 Tele2 seadmekindlustuse tingimused TH-TELE2 20191 TINGIMUSTE KASUTAMINE 1.
TELE2 SEADMEKINDLUSTUSE tingimused TH-TELE2 20191 Vaata lisaks www.tele2.ee TELE2 SEADMEKINDLUSTUSE TINGIMUSED TH-TELE2 20191 1 Tele2 seadmekindlustuse tingimused TH-TELE2 20191 TINGIMUSTE KASUTAMINE 1.
Matemaatiline analüüs III 1 4. Diferentseeruvad funktsioonid 1. Diferentseeruvus antud punktis. Olgu funktsiooni f : D R määramispiirkond D R selles p
 Matemaatiline analüüs III 4. Diferentseeruvad funktsioonid. Diferentseeruvus antud punktis. Olgu funktsiooni f : D R määramispiirkond D R selles paragravis mingi (lõplik või lõpmatu) intervall ning olgu
Matemaatiline analüüs III 4. Diferentseeruvad funktsioonid. Diferentseeruvus antud punktis. Olgu funktsiooni f : D R määramispiirkond D R selles paragravis mingi (lõplik või lõpmatu) intervall ning olgu
Remote Desktop Redirected Printer Doc
 VI OSA, 10. klass füüsika Ühtlaselt muutuv liikumine ja kiirendus Ühtlaselt muutuv liikumine on mitteühtlase liikumise eriliik. Ühtlaselt muutuv liikumine on selline liikumine, mille puhul keha kiirus
VI OSA, 10. klass füüsika Ühtlaselt muutuv liikumine ja kiirendus Ühtlaselt muutuv liikumine on mitteühtlase liikumise eriliik. Ühtlaselt muutuv liikumine on selline liikumine, mille puhul keha kiirus
Microsoft Word - ref - Romet Piho - Tutorial D.doc
 Tartu Ülikool Andmetöötluskeel "Tutorial D" realisatsiooni "Rel" põhjal Referaat aines Tarkvaratehnika Romet Piho Informaatika 2 Juhendaja Indrek Sander Tartu 2005 Sissejuhatus Tänapäeval on niinimetatud
Tartu Ülikool Andmetöötluskeel "Tutorial D" realisatsiooni "Rel" põhjal Referaat aines Tarkvaratehnika Romet Piho Informaatika 2 Juhendaja Indrek Sander Tartu 2005 Sissejuhatus Tänapäeval on niinimetatud
7 KODEERIMISTEOORIA 7.1 Sissejuhatus Me vaatleme teadete edastamist läbi kanali, mis sisaldab müra ja võib seetõttu moonutada lähteteadet. Lähteteade
 7 KODEERIMISTEOORIA 7.1 Sissejuhatus Me vaatleme teadete edastamist läbi kanali, mis sisaldab müra ja võib seetõttu moonutada lähteteadet. Lähteteade kodeeritakse, st esitatakse sümbolite kujul, edastatakse
7 KODEERIMISTEOORIA 7.1 Sissejuhatus Me vaatleme teadete edastamist läbi kanali, mis sisaldab müra ja võib seetõttu moonutada lähteteadet. Lähteteade kodeeritakse, st esitatakse sümbolite kujul, edastatakse
Õppekavarühm Õppekava nimetus Õppekava kood EHIS-es KEHTNA KUTSEHARIDUSKESKUSE ÕPPEKAVA Mootorliikurid, laevandus ja lennundustehnika Liikurmas
 Õppekavarühm Õppekava nimetus Õppekava kood EHIS-es 199780 KEHTNA KUTSEHARIDUSKESKUSE ÕPPEKAVA Mootorliikurid, laevandus ja lennundustehnika Liikurmasinadiagnostik Vehicle technician, level 5 техник по
Õppekavarühm Õppekava nimetus Õppekava kood EHIS-es 199780 KEHTNA KUTSEHARIDUSKESKUSE ÕPPEKAVA Mootorliikurid, laevandus ja lennundustehnika Liikurmasinadiagnostik Vehicle technician, level 5 техник по
Tarvikud _ Puhurid ja vaakumpumbad INW külgkanaliga Air and Vacuum Components in-eco.co.ee
 Tarvikud _ Puhurid ja vaakumpumbad INW külgkanaliga Air and Vacuum Components in-eco.co.ee IN-ECO, spol. s r.o. Radlinského 13 T +421 44 4304662 F +421 44 4304663 E info@in-eco.sk Õhufiltrid integreeritud
Tarvikud _ Puhurid ja vaakumpumbad INW külgkanaliga Air and Vacuum Components in-eco.co.ee IN-ECO, spol. s r.o. Radlinského 13 T +421 44 4304662 F +421 44 4304663 E info@in-eco.sk Õhufiltrid integreeritud
VANASÕIDUKIKS TUNNUSTAMISE AKT Nr 62 Sõiduki olulised andmed Sõiduki mark Husqvarna Vanasõiduki klass Mudel ja modifikatsioon 282E Silverpil Värvus hõ
 VANASÕIDUKIKS TUNNUSTAMISE AKT Nr 62 Sõiduki olulised andmed Sõiduki mark Husqvarna Vanasõiduki klass Mudel ja modifikatsioon 282E Silverpil Värvus hõbehall Tehasetähis (VINkood) Valmistajamaa Rootsi Esmane
VANASÕIDUKIKS TUNNUSTAMISE AKT Nr 62 Sõiduki olulised andmed Sõiduki mark Husqvarna Vanasõiduki klass Mudel ja modifikatsioon 282E Silverpil Värvus hõbehall Tehasetähis (VINkood) Valmistajamaa Rootsi Esmane
Microsoft Word - Errata_Andmebaaside_projekteerimine_2013_06
 Andmebaaside projekteerimine Erki Eessaar Esimene trükk Teadaolevate vigade nimekiri seisuga 24. juuni 2013 Lehekülg 37 (viimane lõik, teine lause). Korrektne lause on järgnev. Üheks tänapäeva infosüsteemide
Andmebaaside projekteerimine Erki Eessaar Esimene trükk Teadaolevate vigade nimekiri seisuga 24. juuni 2013 Lehekülg 37 (viimane lõik, teine lause). Korrektne lause on järgnev. Üheks tänapäeva infosüsteemide
RK-2001AT2-ENG_AC22.kmd
 KASUTUSJUHEND RK-2001AT2 TAHKEKÜTUSEL TÖÖTAVA KATLA TEMPERATUURIKONTROLLER Versioon AC22 Toote ajalugu: Kuupäev Versioon Muudatused 2010-08-03 A803 Suitsugaaside termostaat on vaid kütuse lõppemise tuvastamiseks
KASUTUSJUHEND RK-2001AT2 TAHKEKÜTUSEL TÖÖTAVA KATLA TEMPERATUURIKONTROLLER Versioon AC22 Toote ajalugu: Kuupäev Versioon Muudatused 2010-08-03 A803 Suitsugaaside termostaat on vaid kütuse lõppemise tuvastamiseks
MAHUTITE HINNAKIRI 2STORE TRANSPORDIMAHUTID (mahutitel on ADR luba ja CE sertifikaat) 01-FUEL 01-FUEL12 02-POWER 2STORE 420L HDPE mahuti diiselkütuste
 01-FUEL 01-FUEL12 02-POWER 2STORE 420L HDPE mahuti diiselkütuste") 2STORE TRANSPORDIMAHUTID (mahutitel on ADR luba ja CE sertifikaat) 01-FUEL 01-FUEL12 02-POWER 2STORE 420L HDPE mahuti diiselkütustele ja õlidele mis on mõeldud masinatele ja agregaatidele millel on oma
2STORE TRANSPORDIMAHUTID (mahutitel on ADR luba ja CE sertifikaat) 01-FUEL 01-FUEL12 02-POWER 2STORE 420L HDPE mahuti diiselkütustele ja õlidele mis on mõeldud masinatele ja agregaatidele millel on oma
VRB 2, VRB 3
 Tehniline andmeleht Sadulventiilid (PN 6) VR - tee ventiil, sise- ja väliskeere 3-tee ventiil, sise- ja väliskeere Kirjeldus Omadused Mullikindel konstruktsioon Mehaaniline snepperühendus täiturmootoriga
Tehniline andmeleht Sadulventiilid (PN 6) VR - tee ventiil, sise- ja väliskeere 3-tee ventiil, sise- ja väliskeere Kirjeldus Omadused Mullikindel konstruktsioon Mehaaniline snepperühendus täiturmootoriga
Microsoft Word - essee_CVE ___KASVANDIK_MARKKO.docx
 Tartu Ülikool CVE-2013-7040 Referaat aines Andmeturve Autor: Markko Kasvandik Juhendaja : Meelis Roos Tartu 2015 1.CVE 2013 7040 olemus. CVE 2013 7040 sisu seisneb krüptograafilises nõrkuses. Turvaaugu
Tartu Ülikool CVE-2013-7040 Referaat aines Andmeturve Autor: Markko Kasvandik Juhendaja : Meelis Roos Tartu 2015 1.CVE 2013 7040 olemus. CVE 2013 7040 sisu seisneb krüptograafilises nõrkuses. Turvaaugu
Microsoft PowerPoint - Niitmise_tuv_optiline_ja_radar.pptx
 Ettekanne ESTGIS aastakonverentsil 30.11.2012 Niidetud alade tuvastamine multispektraalsete ja radarsatelliidipiltide põhjal Kaupo Voormansik Sisukord 1. Eksperiment 2012 suvel multispektraalsete mõõtmiste
Ettekanne ESTGIS aastakonverentsil 30.11.2012 Niidetud alade tuvastamine multispektraalsete ja radarsatelliidipiltide põhjal Kaupo Voormansik Sisukord 1. Eksperiment 2012 suvel multispektraalsete mõõtmiste
VaadePõllult_16.02
 OLARI TAAL KES JULGEB EESTIT REFORMIDA? VAADE PÕLLULT Illustratsioonid: Ebba Parviste SKP (miljard USD) RAHVAARV (miljon inimest) SOOME 267 5,5 LÄTI 31 2 majandusvõimsuse vahe 8,6 korda rahvaarvu vahe
OLARI TAAL KES JULGEB EESTIT REFORMIDA? VAADE PÕLLULT Illustratsioonid: Ebba Parviste SKP (miljard USD) RAHVAARV (miljon inimest) SOOME 267 5,5 LÄTI 31 2 majandusvõimsuse vahe 8,6 korda rahvaarvu vahe
KEHTNA KUTSEHARIDUSKESKUS KÄSKKIRI Kehtnas nr 2-1/8 Kehtna Kutsehariduskeskuse täiskasvanuhariduse ja täiendkoolituste läbiviimise eeskirja
 KEHTNA KUTSEHARIDUSKESKUS KÄSKKIRI Kehtnas nr 2-1/8 Kehtna Kutsehariduskeskuse täiskasvanuhariduse ja täiendkoolituste läbiviimise eeskirja kinnitamine 1. Kinnitan täiskasvanuhariduse ja täiendkoolituste
KEHTNA KUTSEHARIDUSKESKUS KÄSKKIRI Kehtnas nr 2-1/8 Kehtna Kutsehariduskeskuse täiskasvanuhariduse ja täiendkoolituste läbiviimise eeskirja kinnitamine 1. Kinnitan täiskasvanuhariduse ja täiendkoolituste
Eesti Ettevõtluskõrgkool Mainor rakenduskõrghariduse õppekava ROBOOTIKATARKVARA ARENDUS Õppekava nimetus Õppekava nimetus inglise keeles Kõrgharidusta
 Eesti Ettevõtluskõrgkool Mainor rakenduskõrghariduse õppekava ROBOOTIKATARKVARA ARENDUS Õppekava nimetus Õppekava nimetus inglise keeles Kõrgharidustaseme õpe Õppevorm(id) Õppeasutus Õppekava maht (EAP)
Eesti Ettevõtluskõrgkool Mainor rakenduskõrghariduse õppekava ROBOOTIKATARKVARA ARENDUS Õppekava nimetus Õppekava nimetus inglise keeles Kõrgharidustaseme õpe Õppevorm(id) Õppeasutus Õppekava maht (EAP)
loeng7.key
 Grammatikate elustamine JFLAPiga Vesal Vojdani (TÜ Arvutiteaduse Instituut) Otse Elust: Java Spec https://docs.oracle.com/javase/specs/jls/se8/html/ jls-14.html#jls-14.9 Kodutöö (2. nädalat) 1. Avaldise
Grammatikate elustamine JFLAPiga Vesal Vojdani (TÜ Arvutiteaduse Instituut) Otse Elust: Java Spec https://docs.oracle.com/javase/specs/jls/se8/html/ jls-14.html#jls-14.9 Kodutöö (2. nädalat) 1. Avaldise
Microsoft Word - 03_ausus lisaylesanded.doc
 ÕPL LS 3 LSÜLSNDD USUS ML eemat usus (sh teisi teemasid) saab sisse juhatada ka HHK- (H HLB KSULK) meetodil. Näiteks: Miks on ausus hea? Miks on ausus halb? Miks on ausus kasulik? H: Hoiab ära segadused
ÕPL LS 3 LSÜLSNDD USUS ML eemat usus (sh teisi teemasid) saab sisse juhatada ka HHK- (H HLB KSULK) meetodil. Näiteks: Miks on ausus hea? Miks on ausus halb? Miks on ausus kasulik? H: Hoiab ära segadused
Taskuprinter KASUTUSJUHEND
 Taskuprinter KASUTUSJUHEND Täname, et ostsite taskuprinteri Polaroid Mint. Käesoleva kasutusjuhendi eesmärk on anda teile juhiseid toote ohutuks kasutamiseks ja et see ei kujutaks endast kasutajale mingit
Taskuprinter KASUTUSJUHEND Täname, et ostsite taskuprinteri Polaroid Mint. Käesoleva kasutusjuhendi eesmärk on anda teile juhiseid toote ohutuks kasutamiseks ja et see ei kujutaks endast kasutajale mingit
12. Marek Kolk, Kõrgem matemaatika, Tartu Ülikool, Algfunktsioon ja määramata integraal Sisukord 12 Algfunktsioon ja määramata integraal 1
 2. Marek Kolk, Kõrgem matemaatika, Tartu Ülikool, 203-. 2 Algfunktsioon ja määramata integraal Sisukord 2 Algfunktsioon ja määramata integraal 9 2. Sissejuhatus................................... 50 2.2
2. Marek Kolk, Kõrgem matemaatika, Tartu Ülikool, 203-. 2 Algfunktsioon ja määramata integraal Sisukord 2 Algfunktsioon ja määramata integraal 9 2. Sissejuhatus................................... 50 2.2
STECA PÄIKESEPANEELIDE KONTROLLERID Steca Tarom MPPT 6000, 6000-M Steca Tarom MPPT laadimiskontroller on seade, mis loob uusi kasutusstandardeid. Kont
 STECA PÄIKESEPANEELIDE KONTROLLERID Steca Tarom MPPT 6000, 6000-M Steca Tarom MPPT laadimiskontroller on seade, mis loob uusi kasutusstandardeid. Kontrolleri laialdased kasutusvõimalused on tagatud tänu
STECA PÄIKESEPANEELIDE KONTROLLERID Steca Tarom MPPT 6000, 6000-M Steca Tarom MPPT laadimiskontroller on seade, mis loob uusi kasutusstandardeid. Kontrolleri laialdased kasutusvõimalused on tagatud tänu