EESTI MAAÜLIKOOL. Tehnikakolledž. Marten Noorem PNEUMAATILISE RADIAALMOOTORI PROJEKT PNEUMATIC RADIAL MOTOR PROJECT. Rakenduskõrghariduse töö
|
|
|
- Aleksander Kiis
- 1 aastad tagasi
- Vaatused:
Väljavõte

1 EESTI MAAÜLIKOOL Tehnikakolledž Marten Noorem PNEUMAATILISE RADIAALMOOTORI PROJEKT PNEUMATIC RADIAL MOTOR PROJECT Rakenduskõrghariduse töö tehnotroonika erialal Juhendaja: Assistent Tartu 2015
2 ABSTRACT Noorem, M. professional higher education thesis: Pneumatic radial motor project Tartu, Estonian University of Life Sciences, Bookbinding in two copies 54 pages, 27 figures, format A4, 23 constructional drawings. In Estonian language. The aim of the higher education thesis is to design and build a working pneumatic radial motor for the pneumatic vehicle. The motors design must me modular, so failed components could be changed with ease. Also the motor as to use as much standard parts as possible for the modular purpose. Key words: Pneumatics, radial engine, pneumobil, experimental motor. 2
3 SISUKORD ABSTRACT... 2 TÄHISED... 5 SISSEJUHATUS TÖÖ EESMÄRK JA ÜLESANDED Töö eesmärk Nõuded MOOTORI ARVUTUS Mootori projekteerimise tingimused Veeretakistus Õhutakistus Inertsjõud Ülekannete kaod Summaarne takistav jõud Kiirendus Põhipaak Paisupaak Silindrite valik Mootori parameetrid kiirendusel Kestvussõit Kestvusõidul kiirendamine Kestvusõidul kiirenduseta sõitmine Läbitav distants Mootori disain Silindrid Silindrite kinnitamine väntvõllile Silindri kinnitamine mootori raamile Mootori raam Mootori ülekanne Reduktor MOOTORI KATSETAMINE MOOTOR PÄRAST VÕISTLUST KOKKUVÕTE KASUTATUD KIRJANDUS LISAD Lisa A. Lihtlitsents
4 Lisa B. Pneumoskeem Lisa C. Tehnilised joonised
5 TÄHISED µh nurkhammasrataste paaris kaduva võimsuse protsent, 3% µk ketirataste paaris kaduva võimsuse protsent, 2% µkk käigukastis kaduva võimsuse protsent, 6% µl laagrites kaduva võimsuse protsent, 0,005% A masina otsvaate pindala, mm 2 a kiirendus, m/s 2 Ak kolvi pindala, mm 2 A v kolvi varda pindala, mm 2 C d õhutakistuse konfitsent f veerehõõrdetegur, mm F 4s nelja silindri moodustatav jõud, N F a inertsjõud, N Fev esimesele veermikule mõjuv hõõrdejõud, N F N normaaljõud, N F s kolvi maksimaalne lükkav jõud sisseliikumisel, N Ft summaarne takistav jõud, N F tv tagumisele veermikule mõjuv hõõrdejõud, N F v kolvi maksimaalne lükkav jõud väljaliikumisel, N Fvt veeretakistus, N F õhk õhutakistus, N Fü ülekannetes kaduv võimsus, 15% g raskus kiirendus, m/s 2 K s kahepoolse silindri maksimaalne käikude arv 5
6 m mass, kg M mootori arendatav pöördemoment, Nm P mootori arendatav kasulik võimsus, kw p rõhk, bar p amb pneumosilindri normaal rõhk (1 bar), bar Pv vajalik võimsus, kw Pvü ülekandest tekkiv võimsus vajadus, kw Q õhuvool silindrisse paisupaagist, l/min Qm mootorite vastuvõetav voolu hulk normaalliitrites minuti kohta, Nl/min Qr reduktori pealevool normaalliitrites minutis, Nl/min Q s kahetoimelise silindri õhukulu, l Q1 õhuvool, 600 Nl/min Q 2 õhuvool, 95 Nl/min r väntvõlli raadius, mm re esimese ratta raadius, mm r t tagumise ratta raadius, mm s kolvi käigu pikkus, mm s1 kiirenduse läbimiseks kuluv teepikkus s 2 ilma kiirenduseta läbitav teepikkus, m s k kogu raja pikkus, m t aeg, mille kestel kiirendus toimub (leitud katse teel, 24 sekundit), s t 1 kiirenduseks kuluv aeg, s t2 ilma kiirenduseta liikumiseks kuluv aeg, s t2 kiirenduseta läbitavale teepikkusele kuluv aeg, s 6
7 v kiirus, m/s v 0 algkiirus, (0) m/s V1 kiirenduse puhul kasutatava õhu maht, l v1 minimaalne keskmine kiirus, m/s V 2 ilma kiirenduseta läbitava tee jooksul kulutatav õhu maht, l vmax maksimaalne kiirus distantssõidul (17 km/h), m/s Vp paisupaagi maht, l V pp põhipaagi õhu hulk ümber arvestatuna 1 bar keskkonda, l vs kolvi sisseliikumise kiirus, m/s vv kolvi liikumise kiirus, m/s η pneumaatilise silindri kasutegur ρ õhutihedus, kg/m 3 ω mootori arendatav nurkkiirus, rad/s 7
8 SISSEJUHATUS Käesolev töö annab ülevaate pneumaatilise radiaalmootori projekteerimisest ja valmistamisest. Mootori projekteerimisel on ammutatud inspiratsiooni radiaal-sisepõlemismootorist, kuid seda on täiustatud, kasutades ära pneumaatiliste silindrite kahepoolset liikumist. Antud mootorit kasutati suruõhusõiduki ajamina, mis ehitati VIII. International Aventics Pneumobile Competition võistluse tarbeks. Maaülikooli meeskond võtttis võistlusest osa juba teist korda ning väljakutse esitamiseks teistele meeskondadele konstruktsiooni kategoorias oli tarvis originaalset mootori tehnilist lahendust, milleks oli radiaalmootor. Eesti meeskond saavutas 54 meeskonna seast konstruktsiooni kategoorias kolmanda koha. Mootorit projekteerides oli oluline rõhk modulaarsusel võimalusel purunenud ning mitte töötavaid komponente kiiresti välja vahetada. Mootor on projekteeritud vastavalt võistlustingimustele ja ülikooli piiratud ressurssidele. Mootori projekteerimise ja valmistamise põhietapid: 1. Mootori arvutus 2. Mootori mudeli loomine 3. Standardiseerimine 4. Mootori koostamine Töö koosneb viiest põhijaotisest. Esimeses põhijaotis on kirjeldatud projekteerimise piiravad tegurid ning nõuded. Teises põhijaotises on mootori arvutus. Kolmandas põhijaotises mootori koostamine. Neljandas põhijaotises mootori katsetamine. Viiendas põhijaotises mootori ja sõiduki sooritus võistlusel. 8
9 1. TÖÖ EESMÄRK JA ÜLESANDED 1.1 Töö eesmärk Töö eesmärgiks on disainida ning valmis ehitada töötav pneumaatiliste silindritega radiaalmootor, selle katsetamine koormuseta ja koormusega. Töö eesmärgi täitmiseks on püstitatud järgmised ülesanded: 1. Võistlusreeglite läbitöötamine. 2. Pneumaatikaalase informatsiooniga tutvumine. 3. Esialgse mootori mudeli loomine. 4. Standardiseerimine. 5. Mootori lõplik modelleerimine ning tööjooniste tegemine. 6. Mootori detailide valmistamine/tellimine. 7. Mootori komplekteerimine ning testimine. 8. Mootori testimine koormusega 9. Järelduste tegemine. 1.2 Nõuded Mootori disaini piiravad võistlusel VIII. International Aventics Pneumobile Competition ette antud reeglid [1]: 1. Peab kasutama võistluste korraldaja Bosch Rexroth pneumaatilisi komponente. 2. Lineaarne liikumine tuleb muuta pöördliikumiseks. 3. Maksimaalne silindrite arv: Maksimaalne süsteemi töörõhk 10 bar. 5. Maksimaalne silindrite läbimõõt: 100 mm. 6. Maksimaalne puhveranumate suurus on kokku 100l. 7. Maksimaalne kasutatav energia: 10l lämmastiku, 200 bar. 9
10 2. MOOTORI ARVUTUS 2.1 Mootori projekteerimise tingimused Mootori projekteerimisel on püstitatud eesmärgiks saavutada sõiduki maksimaalne kiirus 65km/h mitte rohkem kui 25 sekundiga. Selleks tuleb tagada mootori väljundvõimsuse efektiivne rakendamine püstitatud eesmärkide täitmisel, arvestades, et mootori kasulikku väljundvõimsust vähendavad: 1. veeretakistus; 2. õhutakistus; 3. kaod mehaanilistes ülekannetes; 4. inertsjõud Veeretakistus Diferentsiaali ning neljanda ratta arvelt kaalu säästmiseks on sõidukil kolm ratast. Esimesel teljel on kaks 508mm läbimõõduga ratas ning tagumise veermiku moodustab üks 660mm läbimõõduga ratas. Summaarne hõõrdejõud sõltub normaaljõust (F N), materjalipaarist (f) ja ratta raadiusest. Veerehõõrdejõu masina esimesele veermikule (Fev) ja tagumisele veerimikule (Ftv) leiab valemist (2.1; 2.2) [2]: F F f F = r 2.5mm *1726N = 508mm N ev = r f F = r kus f veerehõõrdetegur [3], mm; F N normaaljõud, N; r er esimese ratta raadius, mm; rtr tagumise ratta raadius, mm. 2.5mm *1726N = 660mm N tv = r N, (2.1) N, (2.2) 10
11 Normaaljõud (FN) kirjeldab masinale mõjuvat gravitatsiooni jõudu (2.3): F N = m g= 176kg *9.8m / s = 1726N, (2.3) kus m masina ning piloodi kaal, kg; g raskus kiirendus, m/s 2. Masinal on sildadel erineva läbimõõduga rattad, seega tuleb valemit vormistades arvestada, et see kirjeldaks kahte silda. Kogu veerehõõrdejõudu leidmiseks tuleb valemis arvestada kahe esimese ratta hõõrdejõuga ning ühe tagumise ratta hõõrdejõuga ja jagada see rataste arvuga. Koormuse saab jagada kolme ratta vahel, sest masina raskuskese on kahe veermiku keskpunktis. Veeretakistust masina veermikule (F vt) leiab valemist (2.4) : F 2 Fev + F = 3 2*16.7N N = 3 tv vt = kus F ev esimesele veermikule mõjuv hõõrdejõud, N; F tv tagumisele veermikule mõjuv hõõrdejõud, N. N, (2.4) 11
12 2.1.2 Õhutakistus Õhutakistus sõltub lihtsustatud kujul masina eestvaate pindalast, õhutihedusest, õhutakistuse koefitsiendist ja kiirusest. Õhutakistust masinale (F õhk) leiab valemist (2.5) [4]: kus F A Cd ρ v = 2 0.6m = *0.4*1.20 kg 2 *(18m / s) m 2 2 õhk = 47 A masina otsvaate pindala, mm 2 ; C d õhutakistuse koefitsient [4]; ρ õhutihedus, kg/m 3, [5]; v kiirus, m/s. 2 N, (2.5) Inertsjõud Masina kiirendamisel soovitud maksimaalse kiiruseni 65 km/h on inertsjõud olulise tähtsusega. Pärast selle kiiruseni jõudmist, muutub arvutustes kasutatav kiirendus nulliks ning edaspidiselt inertsjõudu arvestada pole tarvis, sest planeeritud kiirus takistavate jõudude suuruse tõttu enam kasvada ei saa. Inertsjõud (F a) sõltub masina massist ja kiirendusest (2.6): m F a = m a= 176 kg *0.75 = 132N, s (2.6) kus m mass, kg; a kiirendus, m/s 2. 12
13 Eelneva valemi kiirendus (a) tuleb ühtlase kiirenduse valemist (2.7) [12]: v v0 18m / s 0 a = = = 0.75, t 24s (2.7) kus v tingimustes kajastatud maksimaalne kiirus, m/s; v0 algkiirus, (0) m/s; t aeg, mille kestel kiirendus toimub (leitud katse teel, 24 sekundit), s; Ülekannete kaod Alustades mootori väntvõllist, sisaldab ajam (joonis 2.1): Ühte spiraalhammastega koonushammasrataste paari, mille kasutegur on 1:1 suhte juures 97-99% [7] Kolme ketirataste paari, iga ühe kasutegur 98% [8] Ühte sirghammastega mootorratta käigukast 94-96% [7] (madala ülekande suhtega hammasrattad) Üheksateistkümmet laagrit, igaühe kasutegur % (võetud lubatud keskmine) [9] Kogu võimsuse kadu (Fü): F ü = µh+ 3 µk+ µkk+ 19 µl = 15,17, (2.8) kus µh koonushammasrataste paaris kaduva võimsuse protsent, 3%; µk ketirataste paaris kaduva võimsuse protsent, 2%; µkk käigukastis kaduva võimsuse protsent, 6%; µl laagrites kaduva võimsuse protsent, 0,005%. 13
, D 06B-1 ketiratas Z=32, E 06B-1 ketiratas z=30")
 leidmiseks tuleb kõik takistavad jõud kokku liita (2.9).")
14 Joonis 2.1 Sõiduki ülekanne: A 06B-1 ketiratas z=90, B 06B-1 ketiratas z=50, C 06B-1 ketiratas Z=32 (ketiratas on fikseeritud reduktori hammasrattale), D 06B-1 ketiratas Z=32, E 06B-1 ketiratas z=30 (ketiratas on fikreeritud reduktori hammasrattale), F 06B-1 ketiratas z=24, G Kawasaki KX 80 kuue käiguline käigukast, H 26 jalgratta ratas Summaarne takistav jõud Summaarne takistav jõud maksimaalse kiiruseni jõudmiseks, sõltub veeretakistusest, õhutakistusest ja inertsjõust. Pärast maksimaalse soovitud kiiruseni jõudmist langeb inertsjõud võrrandist välja, sest kiirendus enam ei jätku. Summaarse takistava jõu (Ft) leidmiseks tuleb kõik takistavad jõud kokku liita (2.9). Ft = Fa + Fvt + Fõhk = 132 N N + 47N = 195N, (2.9) kus F a inertsjõud, N; F vt veeretakistus, N; Fõhk õhutakistus, N. 14
15 Takistavatele jõududele lisandub võimsuse kadu ülekandes. Seda saab vaadelda kiirendus katse ja distantssõidu võimsuse vajaduse arvutustes. 2.2 Kiirendus Teades takistavaid jõudusid, saab välja arvutada kiirenduskatsel vajaliku võimsuse, mida mootor peab olema võimeline arendama. Võimsuse (Pv) arvutamiseks vajalik valem: Pv = Ft v= 195 N *18m / s = 3. 51kW, (2.10) kus Ft summaarne takistav jõud, N; v kiirus, m/s. Vajalik mootorivõimsus, mis ületaks takistavaid elemente on 3.51 kw. Sellele lisandub veel ülekande kaduvvõimsus, mida saab vaadelda, kui mootorivõimsusarvutus on lõpuni viidud. 2.3 Põhipaak Võistlusel on ettenähtud igale osalejale üks 10-liitrise mahuga paak, mis sisaldab 200 bar suuruse rõhu all lämmastikgaasi. Joonis 2.2 kirjeldab lämmastiku normaalliitrite langu rõhu langemisel. Sellest joonisest on abi optimaalse lämmastiku vooluhulga leidmiseks. Silindrite valikul on arvestatud reduktori läbilaskevõimeks 600Nl/min, sest see kirjeldab mootori minimaalset võimekust. 15
![Joonis 2.2 Lämmastiku vooluhulga karakteristik reduktorist väljudes [21]. 2.3 Paisupaak Paisupaake on tarvis kiirenduse tarbeks, sest need kompenseerivad õhupealevoolu mootorile.](/docs-images/118/229406731/images/16-0.jpg "Ilma paisupaakideta ei ole võimalik mootorit varustada piisava õhuhulgaga, sest põhipaagi reduktor piirab lämmastiku pealevoolu. Paisupaagid lastakse enne sõitu lämmastiku täis.")
16 Joonis 2.2 Lämmastiku vooluhulga karakteristik reduktorist väljudes [21]. 2.3 Paisupaak Paisupaake on tarvis kiirenduse tarbeks, sest need kompenseerivad õhupealevoolu mootorile. Ilma paisupaakideta ei ole võimalik mootorit varustada piisava õhuhulgaga, sest põhipaagi reduktor piirab lämmastiku pealevoolu. Paisupaagid lastakse enne sõitu lämmastiku täis. Vajaliku lämmastikuvaru saab süsteem nendest paakidest. Kokku on kasutuses neli paisupaaki, iga paagi mahuks 25 liitrit. Võistluse reglement piirab paisupaakide mahu kokku 100-le liitrile. Paisupaagi tühjenemine on seotud otseselt silindrite tarbitavast õhu hulgast. Paisupaagi arvutuste tegemiseks on esmalt tarvis valida silindrid, mida hiljem tuleb arvutuste vastavuse jaoks kontrollida. Silindrite liikumise kiirus on otseselt seotud põhipaagist ja stabiliseerivatest paisupaakidest. Valitud silindrite kohta on informatsioon järgmises peatükis (2.5 Silindrite valik). Mootori pealevool on arvutatud Bosch Rexrothi kalkulaatorit kasutades. [10] Kuna mootor kasutab nelja silindrit, siis tuleb saadud õhuvajadus korrutada neljaga. 16
17 Paisupaakide tühjenemise aja teadasaamiseks tuleb jagada paisupaakide ruumala õhuvoolu kuluga. See aeg on oluline sõidustiili planeerimisel, näiteks ringraja sõidus saab pika sirge peal õhu pealevoolu sulgeda ning seeläbi puhverakut laadida, et pärast kurvi võimalikult pikalt kiirendada. Paisupaakide tühjenemise aega (t3) kirjeldab järgnev valem (2.11): V p t3 = Q Q r m 986,9l = = 23,6s, (2.11) 600l / min 3100l / min kus V p paisupaagi maht, l; Qr reduktori pealevool normaalliitrites minutis, Nl/min; Qm mootorite vastuvõetav voolu hulk normaalliitrites minuti kohta, Nl/min. Võrrandist selgub, et kui paak on tühjas seisus ning suudab edastada vaid 600 Nl/min, siis saavad paisupaagid 23.6 sekundiga tühjaks ning soorituse saavutamisest jääb 0.4 sekundit puudu. Küll aga on sõidu alguses põhipaak ja paisupaagid täis ning kiirendusel on võimalus kogu lämmastik põhipaagist ära kasutada, seega juba keskmisest madalamast Nl/min vooluhulgast piisab, et süsteemi tarve rahuldada (2.12). t3= V p 986,9l = Q r Q m 700l / min 3100l /min = 24,6 s (2.12) 2.4 Silindrite valik Mootori ehituses kasutatakse nelja 50mm läbimõõduga silindrit. Silindrid on 150mm pika käiguga ning kahepoolse töötsükliga. Vastavalt läbimõõdule ning rõhule on võimalik välja arvutada, kui suure jõuga on silindrid võimelised lükkama ja tõmbama. Tootja poolt on need arvutused tehtud 6,3 bar rõhu juures [13]. Kõrge rõhk määrab otseselt mootori pöördemomendi, kuid kui see on liiga kõrge, hakkab sidur ning lõpuks ka ratas libisema. Kasulikum on sõita seetõttu madalama rõhuga see koormab süsteemi vähem ning võimaldab kokku hoida massi ja koostedetailide kabariitmõõtmete arvelt. Optimaalne katsete käigus leitud süsteemi rõhk pärast drosselit on 6 bar-i. 17
18 Vastavalt katsete käigus leitud rõhule, saab välja arvutada silindrite toodetava jõu sisse- (Fs) ning väljaliikumisel (F v). Silindri sisseliikumisel tekkiva jõu (Fs) leiab valemist (2.13) [11]: 2 2 ( A A ) η= 4bar *(1963.5mm 314.2mm )*0.88 = 0. kn Fs = p k v 581, (2.13) kus p rõhk, bar; Ak kolvi pindala, mm 2 ; Av kolvi varda pindala, mm 2 ; η pneumaatilise silindri kasutegur [11]. Silindri väljaliikumisel tekkiva jõu (F v) leiab valemiga (2.14) [11]: 2 Fv = p Ak η= 4bar *1963.5mm *0.88 = kN, (2.14) kus p rõhk, bar; Ak kolvi pindala, mm 2 ; η pneumaatilise silindri kasutegur [11]. Pneumaatika laboris läbiviidud katsed näitasid, et pneumosüsteemis rõhk ei ole seotud silindri liikumise kiirusega. Katse käigus kasutati ühte kahetoimelist silindrit, mille välja liikumise kiirust mõõdeti stopperiga. Katse rõhud, vahemikus 2 kuni 9 bar-i, ei avaldanud erinevust silindri väljaliikumise kiiruse osas. Sellest võib järeldada, et silindri väljaliikumise kiirus on seotud vooluhulgaga, mida läbi drosselklappi saab süsteemi sisestada. Selle katse tulemusena saab koostada järgneva valemi silindri sisse- ning väljaliikumise kiiruste teadasaamiseks. Kolvi välj liikumise kiiruse (vv) saab järnevast valemist (2.15): v Q 36.4l / min = = = 0.368m s, (2.15) 2 2 A mm 314.2mm / v k 18
19 kus Q õhuvool silindrisse paisupaagist, l/min ; Ak kolvi pindala, mm 2. Kolvi sisseliikumise kiirust (v s) kirjeldab järgnev valem (2.16): Q 36.4l / min v = = = 0.31m s s A A mm /, (2.16) k v kus Q õhuvool silindrisse paisupaagist, l/min; Ak kolvi pindala, mm 2 ; A v kolvi varda pindala, mm 2. Silindri toodetav võimsus on võrdeline silindri lükkavast jõust ning kolvi välja-, sisseliikumise kiirusest, sarnaselt varasemalt leitud vajalikule võimsusele, kus arvestati takistavaid jõudusid erinevatel kiirustel. Silindri võimsuse sisse- (P s) (2.17) ja väljaliikumisel (P v) (2.18) on leitud mõlema poole suhtes sarnaselt: Ps = Fs vs = 0.58kN *1.98m / s = 1. 15kW, (2.17) Pv = Fv vv = 0.69kN *1.66m / s = 1. 15kW, (2.18) kus F v kolvi maksimaalne lükkav jõud väljaliikumisel, N; vv kolvi väljaliikumise kiirus, m/s; Fs kolvi maksimaalne lükkav jõud sisseliikumisel, N; v s kolvi sisseliikumise kiirus, m/s. 19
20 Kuna põhipaak on piiravaks teguriks, siis on tarvis teada mitu käiku saab silinder teha, enne kui paagist lämmastik otsa saab. Samuti selle kaudu saab teada kui pikk on mootori töötamise aeg, kui kogu lämmastik võimalikult kiiresti ära kasutada. Kahetoimelise silindri lämmastiku kulu liitrites (Q) ühe tsükli läbimisel kirjeldab järgnev valem (2.19) [11]: ( A A ) Ak s p + pamb k v s p + pamb Qs = + = 2. 68l, (2.19) p p kus A k kolvi pindala, mm 2 ; Av kolvi varda pindala, mm 2 ; s kolvi käigu pikkus, mm; p rõhk (6 bar), bar; pamb pneumosilindri normaalrõhk (1 bar), bar. amb amb Kahepoolse töötsükli puhul silindri maksimaalse käikude arvu teadasaamiseks tuleb ümberarvestatud põhipaagi maksimaalne õhukogus jagada kahetoimelise silindri õhu tarbega. Silindri käikude arvu (K s) saab järgnevast valemist (2.20): V pp K s = = = 736, (2.20) Q 2.68l s kus V pp põhipaagi õhu hulk ümberarvestatuna 1 bar keskkonda, l; Q s kahetoimelise silindri õhukulu, l. Käikude arvust lähtuvalt saab välja arvutada mootori tööaja, kui mootor töötab maksimaalse õhukuluga, mis on oluline kiirendusvõistlusel hea tulemuse saavutamisel. Eelduste kohaselt kestab 220m läbimine maksimaalselt 24 sekundit. Eelnevalt leitud silindri käikude arv tuleb nüüd korrutada neljaga, sest mootoris töötavad neli silindrit. 20
21 Mootori maksimaalse tööaja (tt) saab leida eelnevalt leitud käikude arvu ja silindrite kahepoolse käigupikkuse jagades nelja silindri väljaliikumise kiirusega. Töötamise aja (tt) saab leida järgneva valemi abil(2.21): 2 s K s 2 150mm 736 t t = = = 33s, (2.21) v 4 1,66m / s 4 kus s kolvi käigu pikkus, mm; K s kahepoolse silindri maksimaalne käikude arv; v v kolvi liikumise kiirus, m/s. v Selgub, et varem eeldatav kiirendusele kuluv aeg on oluliselt lühem kui põhipaagi tühjenemiseks kuluv aeg, seega põhipaagist piisab kiirenduskatse läbimiseks, mille käigus on õhukulu kõige suurem. 2.7 Mootori parameetrid kiirendusel Toetudes varasematele andmetele on võimalik leida mootori pöördemoment, nurkkiirus ning võimsus. Mootori moodustavad vastastikused jõupaarid, kus kaks silindrit tõukavad ning kaks tõmbavad. Radiaalmootori puhul on kõik silindrid kinnitatud ühise väntvõlli külge, mis liigub tsentri suhtes raadiusega 75mm. Mootori pöördemomendi leidmiseks tuleb pöörlemisraadius korrutada läbi silindrite tekitava jõuga. Mootori arendatava pöördemomendi (M) leian valemiga (2.22): M = F r= 2.5kN *75mm 191Nm, (2.22) 4s = kus F4s nelja silindri moodustatav jõud, N; 21
22 r väntvõlli raadius, mm; Nurkkiirus leitakse läbi joonkiiruse, mis omakorda sõltub selle mootori puhul otseselt silindri väljaliikumise kiirusest. Nurkkiiruse (ω) leidmiseks kasutan järgnevat valemit (2.23): vv 1.66m / s ω = = = 4.12rad / s, r 75mm (2.23) kus vv kolvi väljaliikumise kiirus, m/s; r väntvõlli raadius, mm. Mootori võimsust on leitud pöördemomendi ja nurkkiiruse korrutisena Mootori võimsuse (P) on leitud järgneva valemiga (2.24) P = M ω =190 Nm*22.2rad / s = 4. 22kW, (2.24) kus M mootori arendatav pöördemoment, Nm; ω mootori arendatav nurkkiirus, rad/s. Varasemalt arvutatud võimsuse kao ülekannetes (Pvü) saab välja arvutada valemiga (2.25): P = P F = 4.22kW *0.15 = 0. kw, (2.25) vü ü 63 kus P mootori arendatav kasulik võimsus, kw; Fü ülekannetes kaduv võimsus, 15%. Summaarne takistav võimsus (Psv) koosneb võimsuse vajaduses (Pv) ja võimsuse kaost ülekannetes (Pvü) (2.26): 22
23 Psv = = Pv + Pvü = 3.51kW kW = 4. 14kW, (2.26) kus Pv vajalik võimsus, kw; Pvü ülekandest tekkiv võimsusvajadus, kw. Mootor arendab rohkem võimsust kui ettenähtud tingimuse 65 km/h 220m jooksul tarvis on. Mootori vajalik võimsus 4.14 kw < Mootori toodetav võimsus 4.22 kw. 2.8 Kestvussõit Kestvussõidul peab olema reeglitest lähtuvalt minimaalne keskmine kiirus 15km/h. Kuna toimub ka juhivahetus ning selle ajalist kestvust on ilma harjutamata raske määratleda, siis arvutustes on kasutatud keskmiseks kiiruseks 17km/h. Sellega peaks olema tagatud piisavalt aega juhivahetuseks ning ei tohiks tekkida probleemi keskmise kiiruse mittesaavutamisega. Takistavad elemendid on sarnased kiirendussõidule. Kiirendussõidul on eesmärk kogu lämmastik võimalikult kiiresti ära kulutada, kestvussõidul peab mootor kiirendama kuni 17km/h kiiruse juurde ning seejärel liikuma edasi ilma kiirenduseta. Kiirust aitab hoida maksimumvooluhulga juures varem programmeeritud drossel Kestvusõidul kiirendamine Takistavad elemendid jäävad samaks, mis kiirenduse puhul, seega neid uuesti välja tuua ei ole otstarbekas. Samuti komponente võistlusalade vahel vahetada ei tohi, seega ka silindrite mahud, puhverpaagid ning seeläbi ka õhutarbed jäävad samaks. Samuti osutus kiirendusel kasutatav rõhk sobilikuks kestvussõidul. Järgnevalt on vaadeldud silindrite väljaliikumise kiirust vastavalt nendesse suunatava õhuvoo hulgale. 23
24 Kestvussõidul ei saa puhverpaagid tühjaks, seega pole tarvis otsida optimaalset põhipaagi pealevoolu hulka. Piisab, kui võtta arvesse reduktori minimaalse pealevoolu hulka, mis on 600 Nl/min. Madalama silindrite liikumisekiiruse juures jätkub lämmastiku oluliselt kauemaks kui kiirenduse puhul. Selleks, et saada arvutuslikku aega silindrite töö kohta (t töö), tuleb kasutada valemit (2.21). Mootori maksimaalse tööaja (tt) saab leida eelnevalt leitud käikude arvu ja silindrite kahepoolse käigupikkuse jagades nelja silindri väljaliikumise kiirusega. Töötamise aeg kestvusõidul (2.27): 2 150mm 736 t t = = 184s, 0.3m / s 4 (2.27) kus s kolvi käigu pikkus, mm; Ks kahepoolse silindri maksimaalne käikude arv; v v kolvi liikumise kiirus, m/s. Siit selgub, et põhipaak saab tühjaks 184 sekundiga. Kuna rõhk jääb samaks, siis pole silindrite lükkavat jõudu ja pöördemomenti vaja uuesti välja arvutada. Mootori nurkkiirus on leitud varasema valemiga (2.23) Küll aga muutub mootori nurkkiirus (ω), sest kolvid liiguvad aeglasemalt välja (2.28): 0.3m/s rad ω = = 4.1, 75mm s (2.28) kus vv kolvi väljaliikumise kiirus, m/s; r väntvõlli raadius, mm. Mootori võimsust on leitud pöördemomendi ja nurkkiiruse korrutisena (2.24) 24
25 Mootori võimsus kestvussõidul (P) on (2.29): rad P = 190Nm 4.1 = 0.78kW, s (2.29) us M mootori arendatav pöördemoment, Nm; ω mootori arendatav ringkiirus, rad/s. Varasemalt arvutatud võimsuse kao ülekannetes (Pvü) saab välja arvutada valemiga (2.26). Kestvussõidul ülekandes kaduva võimsuse saab (2.30): P vü = 0.78kW 0.15= 0.12kW, (2.30) kus P mootori arendatav kasulik võimsus, kw; Fü ülekannetes kaduv võimsus, 15%. Summaarne takistav võimsus (P sv) koosneb võimsuse vajadusest (P v) ja võimsuse kaost ülekannetes (Pvü) (2.26): Summaarse takistava võimsuse kestvussõidu puhul saab (2.31): P sv = 0.58 kw kW = 0.7kW, (2.31) kus P v vajalik võimsus, kw; P vü ülekandest tekkiv võimsus vajadus, kw. Mootor arendab piisavalt võimsust, et ettenähtud tingimus 17 km/h 7 sekundi jooksul täita. Mootori vajalik võimsus 0.70 kw < Mootori toodetav võimsus 0.78 kw. 25
26 2.8.2 Kestvusõidul kiirenduseta sõitmine Kiirendusega sõitmisele kuluv energia on välja arvutatud, kuid eesmärk on sõita võimalikult kaugele ette antud paagiga ning seepärast on tarvis pärast kiirenduse lõppu edasi liikuda ilma kiirenduseta. Järgnevad arvutused kirjeldavad kiirenduseta liikumise võimsuse vajadust, et ülejäänud ring sõita võimalikult madala õhukuluga. Pärast kiirendust 17km/h kiirusele, lülitatakse drossel ümber ökonoomse sõidu asendisse ning piirab õhuvoolu eelneva 600 Nl/min, 85Nl/min peale. See tagab olukorra, kus mootorile ei ole võimalik anda peale üleliigset lämmastiku ning piloot ei pea gaasipedaali kasutama. Töötamise aja saab leida varasemalt kirjeldatud valemi abil (2.27): Töötamise aja ilma kiirenduseta liikumisel saab leida (2.32): 2 150mm 736 t t = = 1104s, 0.05m / s 4 (2.32) kus s kolvi käigu pikkus, mm; Ks kahepoolse silindri maksimaalne käikude arv; v v kolvi liikumise kiirus, m/s. Valemist (2.32) selgub, et põhipaak saab kiirenduseta sõites tühjaks 1104 sekundiga. Kuna rõhk jääb samaks, siis pole silindrite lükkavat jõudu ja pöördemomenti vaja uuesti välja arvutada. Mootori nurkkiirus on leitud varasema valemiga (2.23) Küll aga muutub mootori nurkkiirus (ω), sest kolvid liiguvad aeglasemalt välja (2.33): m 0.05 rad ω = s = mm s, (2.33) kus 26
27 vv kolvi väljaliikumise kiirus, m/s; r väntvõlli raadius, mm. Mootori võimsust on leitud pöördemomendi ja nurkkiiruse korrutisena (2.24) Mootori võimsus kestvussõidul kiirenduseta liikudes (P) on (2.34): rad P = 190Nm 0.66 = 0.13kW, s (2.34) kus M mootori arendatav pöördemoment, Nm; ω mootori arendatav nurkkiirus, rad/s. Varasemalt arvutatud võimsuse kao ülekannetes (P vü) saab välja arvutada valemiga (2.26). Kestvussõidul ülekandes kaduva võimsuse saab (2.35): P vü = 0.13kW 0.15= 0.02kW, (2.35) kus P mootori arendatav kasulik võimsus, kw; Fü ülekannetes kaduv võimsus, 15%. Summaarne takistav võimsus (Psv) koosneb võimsuse vajadusest (Pv) ja võimsuse kaost ülekannetes (P vü) (2.26): Summaarse takistava võimsuse kestvussõidu puhul saab (2.36) P sv = kw kw = 0.092kW, (2.36) kus Pv vajalik võimsus, kw; P vü ülekandest tekkiv võimsusvajadus, kw. 27
28 Mootor arendab piisavalt võimsust, et ettenähtud tingimust 17 km/h hoida stabiilsena ning kergelt kiirendavana. Mootori vajalik võimsus kw < Mootori toodetav võimsus 0.13 kw 2.9 Läbitav distants Maksimaalne läbitav distants on leitav kasutades eelnevalt leitud andmeid. Distantssõidu raja pikkus on orienteeruvalt 580m. Iga läbitud ringi lõpus tuleb vahetada juhti, seega ei piisa ainult kiirendamisest ja kiiruse hoidmisest. Kiirenduseks vajalik aeg (t1) on 7 sekundit ning see on kiirenduse läbiviimiseks eeldustekohane optimaalne aeg. Selle aja saab võtta aluseks distantsi väljaarvutamiseks. Kiirenduseks kuluvat aega teades saab välja arvutada selle jooksul kuluva õhu koguse (V1) (2.37): kus Q1 õhuvool, 600 Nl/min; t 1 kiirendusele kuluv aeg, 7s. V = Q t = 600l / min*7s 70l, (2.37) = Soovitud kiiruseni kiirendamine võtab 16m. Ülejäänud teepikkusel peab mootor töötama võimalikult aeglaselt ning seeläbi ka ökonoomselt. Mootor töötab ilma kiirendava liikumiseta ülejäänud teepikkusel. Ilma kiirenduseta liikumise teepikkus on tervest teepikkusest lahutatud kiirenduse läbiviimiseks vajalik teepikkus (2.38). s = sk s = 580m 16m 564m, (2.38) 2 1 = kus s k distantssõidu kogu teepikkus, m; 28
29 s1 kiirenduse läbimiseks kuluv teepikkus. Ülejäänud teepikkus tuleb läbida ilma kiirenduseta. Ülejäänud distantsil kuluva lämmastiku koguse leidmiseks on tarvis distantsi läbimise aega (t2): t s = v 560m = 119s, (2.39) 4.7m / s 2 2 = max kus s2 ilma kiirenduseta läbitav teepikkus, m; v max maksimaalne kiirus distantssõidul (17 km/h), m/s. Teades kiirenduseta sõiduks kuluvat aega, saab arvutada selleks kuluva lämmastiku koguse (V 2) (2.40): V = Q t = 95l / min*119s l, (2.40) = kus Q 2 õhuvool, 95 Nl/min; t2 kiirenduseta läbitavale teepikkusele kuluv aeg, s. Distantssõidus on oluline osa juhi vahetusel, seega on tarvis teada kui pikalt on aega (t v) seda teha (2.41). t s = v 580m ( t1 +t1 ) = (7s + 119s) = 12. s, (2.41) 4.2m / s k v 9 1 kus sk kogu raja pikkus, m; v1 minimaalne keskmine kiirus, m/s; t 1 kiirenduseks kuluv aeg, s; t2 kiirenduseta läbitavale teepikkusele kuluv aeg, s. 29
30 Juhivahetuseks jääb aega 12 sekundit, mis peaks olema piisavalt pikk aeg. Pikem juhivahetuse aeg annab ka võimaluse olla aeglasem kurvides ilma, et pikem kiirendamine mõjutaks mootori ökonoomsust. Kõige olulisem kestvussõidu puhul on distants, mida masin on võimeline läbima. Jagades paagi mahu läbiringi jooksul kulutatava õhu hulgaga, saab teada mitu ringi saab sõita (sr) (2.42). V pp l sr = = = 7.3, (2.42) V +V 70l l 1 kus Vpp põhipaagi õhu hulk ümber arvestatuna 1 bar keskkonda, l; V 1 kiirenduse puhul kasutatava õhu maht, l; V 2 ilma kiirenduseta läbitava tee jooksul kulutatav õhu maht, l; 2 Täis paagiga on masin võimeline võistlustel läbima 7 täisringi kogupikkusega 4,06 km. 30
31 3. Mootori disain Mootori disain on mõjutatud võistlusest VIII. International Aventics Pneumobile Competition, mille raames võistlevale uuele masinale on tarvis mootorit. Võistlusel kasutatakse enamasti kahte tüüpi mootoreid: 1. Hammaslattmootoreid [18], mis on ehituselt lihtsad ja väga võimekad. Nendel mootorite nõrgim külg on käiguvahetus, sest mootor kasutab suure käigu ja läbimõõduga silindreid ning nende toodetav pöördemoment muudab käiguvahetuse keeruliseks. Käikude puudumine muudab nende mootoritega masinate kiiruse reguleerimise vahemiku piiratuks. 2. Ridamootoreid [19], mis võimaldavad suuremat kiirust, kuid on väntvõlli arvelt oluliselt raskemad kui hammaslattmootorid. Radiaalmootor, väikese läbimõõduga silindritega võimaldab suurt kiirust ning on ka ühise väntvõlli tõttu oluliselt madalama kaaluga kui ridamootor. Võistluse raames pole ühtegi radiaalmootorit ehitatud ning pneumaatilise paarisarvulise radiaalmootori ehitamine on väljakutse. Radiaalmootori puhul on kõik silindrid seotud teineteisega keskmise ühise väntvõlli külge. Sisepõlemismootori puhul on radiaalmootoritel kasutusel paaritu arv silindreid, sest töö toimub ainult ühes suunas ning seeläbi ei ole ohtu surnud nurka kinni jäämiseks. Sisepõlemismootori puhul loetakse mõistlikuks silindrite arvuks alates 5-st [20]. Tööloogika on radiaalmootoril väga sarnane ridamootorile. Erinevus seisneb väntvõllis ning juhtsilindri olemasolus, mis tekitab süsteemi omalaadse elliptilise (äärmiselt minimaalse) liikumise. Radiaal 4 mootori puhul asetsevad neli silindrit teineteise suhtes ringjoonel 90-kraadise nurga all (joonis 3.1). Kasutades kahepoolseid silindreid võib lugeda imaginaarsete silindrite arvu hoopis kaheksaks. Surnud punkti ületamisele aitavad kaasa kõrvalasetsev silindripaar. Silindrid on liikuvad nii eest kui ka tagant, seepärast ei ole mootoril tarvis ka kepse silindrid ise töötavad kepsudena. Silindrid on paigutatud kahe mootori plaadi vahele, mis moodustavad tikkpoltide abil puuri (joonis 3.2; 3.3; 3.4; 3.5). 31

32 Joonis 3.1 Radiaal 4-tüüpi mootori silindrite asetsus. Mootori projekteerimisel on arvestatud, et komponendid on kergesti vahetatavad, mis tähendab, et kui mõni komponent peaks kaotama oma töövõimelisuse, siis saab mootori kiiresti masina alt eemaldada ning katkise komponendi välja vahetada. Joonis 3.2 Mudelkeskkonnas loodud mootor (pealmise kaaneta). 32


33 Joonis 3.3 Valmisoleva mootori altvaade, ilma kaaneta Joonis 3.4 Mudelkeskkonnas loodud mootor 33
![Joonis 3.5 Valmisoleva mootori pealtvaade 3.1 Silindrid Silindrite valik mootori puhul on piiratud võistlusereglemendiga [1].](/docs-images/118/229406731/images/34-0.jpg "Mootori puhul on kasutatud standardseid 50mm läbimõõduga, 150mm käiguga, PRA tüüpi silindreid Bosch Rexroth kataloogist [13].")

34 Joonis 3.5 Valmisoleva mootori pealtvaade 3.1 Silindrid Silindrite valik mootori puhul on piiratud võistlusereglemendiga [1]. Mootori puhul on kasutatud standardseid 50mm läbimõõduga, 150mm käiguga, PRA tüüpi silindreid Bosch Rexroth kataloogist [13]. Valitud silindrid on piisavalt kompaktsed ning taluvad ka külgsuunalist paindumist, et täita radiaalmootori ehituslikult iseloomulikke nõudeid. Silindritel on magneetiline kolb, mida saab kasutada positsioonianduritega silindri positsiooni lugemiseks. Samuti on kolvi varre otsas M16 standardkeere, mis võimaldab kasutada standardtooteid. 34
![Joonis 3.6 Standartne PRA seeria d=50mm, s=150mm silinder [13] 3.](/docs-images/118/229406731/images/35-0.jpg "2 Silindrite kinnitamine väntvõllile Silindritel on varre otsas 16mm standardkeere[13], millele sobivad ISO")
![standardkinnitused. Silindrid kinnituvad väntvõllile 16mm tihvti abil (joonis 3.3) [14].](/docs-images/118/229406731/images/35-1.jpg "Kinnitusel on otsas silindri kujuline kiireemaldatav tihvt, mis istub nõellaagrisse (joonisel 3.")
35 Joonis 3.6 Standartne PRA seeria d=50mm, s=150mm silinder [13] 3.2 Silindrite kinnitamine väntvõllile Silindritel on varre otsas 16mm standardkeere[13], millele sobivad ISO standardkinnitused. Silindrid kinnituvad väntvõllile 16mm tihvti abil (joonis 3.3) [14]. Kinnitusel on otsas silindri kujuline kiireemaldatav tihvt, mis istub nõellaagrisse (joonisel 3.8 markeeritud punasega). Joonis mm sisekeermega kahvelkinnitus 35


36 Selleks, et hõõrdetakistus oleks väiksem, on kolmele otsakinnitusele väntvõllile pressitud nõellaagrid. Neljas silinder on juhtsilinder (joonisel 3.8 paremal all), see on väntvõllile jäigalt fikseeritud. Ilma jäiga juhtsilindrita ei suuda radiaalmootor pöördliikumist sooritada. Joonis 3.8 Väntvõll koos silindri otsakinnitustega mudelruumis Joonis 3.9 Väntvõll koos silindri otsakinnitustega 36
, milles on nõellaagrid (joonis 3.5, oranž).")

37 3.3 Silindri kinnitamine mootori raamile Silindrid kinnituvad mootori raamile eriotstarbeliste laagripesadega (joonise 3.10, roheline), milles on nõellaagrid (joonis 3.5, oranž). Laagripesad istuvad osati mootori raami sisse ning seeläbi aitavad kanda pikisuunalisi jõudusid masina raami. Laagripesade vahele kinnituvad standardtooted Bosch Rexrothi kataloogist silindrite kinnitamiseks tagumiselt küljelt (joonis 3.10, punane; joonis 3.11) [15]. Joonis 3.10 Silindrite kinnitamine mootori raamile Joonis 3.11 Detail silindrite kinnitamiseks eest/tagant [15] 37


38 Joonis 3.12 Silindri tagumise kinnituse laagripesa pesapoolne vaade Joonis 4.13 Silindri tagumise kinnituse laagripesa raamipoolne vaade 38


39 3.4 Mootori raam Mootor asetseb kahe 6mm alumiiniumist raami plaadi vahel, mida hoiavad koos 14mm läbimõõduga tikkpoldid. Samade tikkpoltidega, mis on otsast M10 keermestusega, kinnitatakse mootor ka hiljem masina raami alla oma kohtadele kinni. Joonis 3.14 Alumine mootori plaat Joonis 3.15 Ülemine mootori plaat 39


40 Joonis 3.16 Valmistatud mootori plaadid Joonis 3.17 Mootori tikkpolt Mootori puur koosneb kahest mootori plaadist ning 27-st eriotstarbelisest tikkpoldist. Tikkpoldi kehaläbimõõt on 14mm ning mõlemas otsas on M10 keermestus. Samade tikkpoltidega kinnitatakse mootor masina raamile nii, et tikkpoldi keermega osa on raami küljes oleva kinnituse avast läbi ning kinnitatud iselukustuva mutriga. 40

41 3.5 Mootori ülekanne Pneumaatiline süsteem sõltub väga jäigalt sinna suunatava lämmastiku hulgast. Kuna lämmastik on piiratud, siis on piiratud ka süsteemi võimsus. Tulenevalt piiratud õhuvoolust töötavad pneumosilindrid aeglasemalt kui vaja. Küll aga arendavad pneumosilindrid suurt pöördemomenti. Selleks, et saada mootorist rattasse suuremat kiirust, on tarvis kiirendavat ülekannet. Mootoris on kasutusel peavõllil 90-hambaline ketiratas, mille teises otsas on 30 hambaga ketiratas 30-hambaline ketiratas asub reduktoris sees. Reduktori kirjeldus on järgmises peatükis (4.5 Reduktor). Kettülekandes on kasutatud tööstuslikku standard ketti 06B-1, mille tõmbetugevus on 9kN [17]. Selline ülekanne annab otse mootori võllilt kolm kordse kiirenduse, vähendades samas pöördemomenti vastuvõetavamaks teistele komponentidele. Joonis 3.18 Väntvõll ja esimene ülekanne 41


42 3.6 Reduktor Mootor on paigutatud sõiduki põhja alla, et saavutada madalaimat võimalikku massikeset. Selle tõttu on tarvis nurkreduktorit, et horisontaalne pöörlemine muuta vertikaalseks pöörlemiseks. Valmis reduktorid projektis esitatud nõudmisi ei rahuldanud, seega tuli valmistada üks ise. Reduktori ülekandvaks elemendiks on kasutatud Maedler -i standard spiraalhammastega 1:1 ülekandesuhtega koonushammasrattaid [16]. Joonis 3.19 Tootjapoolne pilt kasutatavatest koonushammasratastest [16] Joonis 3.20 Ketirattad seotud koonushammasratastega 42


43 Hammasrataste külge on kinnitatud ketirattad, millest üks on ühendatud mootori ketirattaga ning teine viib liikumise reduktori kohal olevasse käigukasti. Kuna ketirattad asuvad otse hammasratta peal, siis ei teki külgsuunalisi paindumisi ning piisab hammasrataste toetamisest kahe laagri peale. Väliselt on toetatud hammasrataste võll koonusrulllaagri peal, mis toetab nii radiaalseid kui aksiaalseid jõukomponente. Tsentris asub eemaldatav laagripukk, mis koosneb kahest tükist ja istub kokku tappide peal. Nendes olevad laagrid on ainult toetava ülesandega. Joonis 3.21 Reduktori kooste mudelruumis Joonis 3.22 Valmis reduktor ketipinguti ja ketiga. 43


44 Reduktor on koostatud tapp-põhimõttel. Detailid istuvad omavahel kokku tappide peal. See tagab kooste täpsuse keevitamisel detailid ei saa nihkuda paigast. Reduktoril on mootori suhtes ka struktuurne ülesanne, see on sama kõrge kui tikkpoldid ning on kinnitatud mootori raamide vahele. Joonis 3.23 Keevitamata reduktori korpuse detailid ning sisemine laagripukk 44
45 4. MOOTORI KATSETAMINE Pärast mootori komplekteerimist ning elektroonikaga ühendamist testiti kõigepealt klappide ja programmi vastavust, ajades mootorit käsitsi ringi. Mootori positsiooni loeb peavõllil olev absoluut enkooder. Vastavalt asukohale hakkasid jaoturite peal tuled põlema, mis näitasid klappide tööd positsioonil. Igal silindril on kaks klappi, mis on vedruennistuvad ning reguleerivad vastavalt lämmastiku sisse- ja väljavoolu. Pärast käsitsi läbiviidud katset lülitati kontroller automaatrežiimile ning mootor hakkas vaevaliselt jõnksutades käima. Selgus, et jõnksutamise taga olid manuaalselt ülekirjutatavate klappide kraanid, mis olid suletud asendis ning ka silindrite pneumaatilised lõppkäigu leevendid tuli maha keerata. Pärast neid tegevusi hakkas mootor oluliselt paremini ringi käima ning ka vibratsioon vähenes oluliselt. Pärast peenhäälestust meeskonna elektrikute pool,t töötas mootor juba ühtlaselt ning vibratsioon praktiliselt puudus. Sellega võis koormuseta testimise faasi lugeda lõpetatuks ning alustada koormusega testimise faasi. Koormusega testimiseks tuli sõiduk ja mootor omavahel siduda. Koormusega testimiseks täideti kooli kompressorist paisupaagid 10bar õhuga ning sõites otsiti vigasid. Katsetamisel selgus, et mootor toimis väga hästi, küll aga jäi käigukasti kinnitus nõrgaks, mis hakkas jõudu üle kandes läbi painduma. Samuti hakkas käigukastis olev sidur suure pöördemomendi tõttu libisema, mistõttu see tuli jäigalt fikseerida. Aja nappuse tõttu töötasid masinal tehniliste põhjuste tõttu vaid käigud teisest kuuendani, esimest käigu ei õnnestunud töökindlalt tööle saada. Mehaanilise siduri asemel sai siduri pedaali alla pandud lüliti, mis katkestas sõidurežiimi ning peatas käiguvahetuse ajaks mootori. Üldiselt võib lugeda mootori katsetamise õnnestunuks, sest kõik disainitud komponendid töötasid omavahel hästi ning tõrkeid ei esinenud. Ungaris oli esimene reaalne võimalus mootori arvutust ning tulemusi võrrelda. Kiirendussõidu eesmärk 65km/h jäi saavutamata, sest neljandale käigule vahetades purunes tross jättes maksimaalse kiiruse 35km/h juurde. 45
46 Kestvusõidu eesmärk vähemalt 4km sõita ebaõnnestus teiste aeglaste rajal olnud võistlejate tõttu pidev kiirendamine ja pidurdamine keskmise kiiruse hoidmise nimel muutis läbitava distantsi 1.6km pikkuseks. Samuti selgus pärast võistlust pneumaatilises süsteemis projekteerimise viga, mille tõttu jaoturite piloot õhu rõhk oli kahe bar asemel kümme ning iga lülitusega vabastati atmosfääri viis korda rohkem õhku kui oleks tarvis olnud. 46
, mille ajamiks oli projektis kirjeldatud mootor.")
47 5. MOOTOR PÄRAST VÕISTLUST mai 2015 toimus Ungaris, Eger-i linnas pneumosõidukite võistlus VIII. International Aventics Pneumobile Competition, kus osales Eesti meeskond masinaga (joonis 5.1), mille ajamiks oli projektis kirjeldatud mootor. Masin võistles edukalt kõigil võistlusaladel ning oli tugevaks konkurendiks võistluse raames traditsionaalseks saanud hammaslatt ning ridamootoritele. Võitslusel selgus, et mootorit ei ole mõtet edasi arendada kestvussõidu kategoorias, sest lämmastiku tarve on seda tüüpi mootoril otstarbetult suur. Küll aga osutus tänu mootori kiirusele see kasulikuks ringraja sõidus ning kiirendusvõistlusel, millele tasuks panustada tulevikus. Eesti meeskonda premeeriti konstruktsiooni kategoorias kolmanda kohaga. Mootoril oli selles kategoorias oluline roll. Selgus, et mootor on mehaaniliselt üle dimensioneeritud ehk komponentide kabariitmõõtmetelt saaks hoida kokku mootori kaalus. Samuti selgus, et valitud kuuekäiguline maastikumootorrata käigukast osutus nõrgaks lüliks nii ülekande kasuteguri poolest, siduri töökindluse kui ka käikude vahetamise poolest. Seepärast on otstarbekas mootori edasiarendamisel kaaluda keerukama planetaarkäigukasti kasutamist kahest kuni kolmest käigust piisab. Mootor töötas üle ootuste hästi ning hakkas ringi käima ilma suuremate probleemideta. Joonis 5.1 Eesti meeskonna sõiduk Ungaris 47
48 KOKKUVÕTE Pneumaatilise radiaalmootori projekt osutus väga kasulikuks. See andis laialdasi teadmisi pneumaatika maailmas, mehaanikas, elektroonikas ning samuti ka tootmisettevõttesse tööjooniste vormistamises. Projekt on kasulik tudengitele, kes soovivad osa võtta järgmise aasta Pneumobil võistlusest või tutvuda lisaks laboritele ka teistsuguse pneumaatilise lahendusega. Käesoleva rakenduskõrghariduse töö käigus on sooritatud järgnevad teoreetilised ja praktilised tööd: 1. Uuritud survestatud õhu ja lämmastiku käitumist pneumaatilises süsteemis. 2. Matemaatiliselt leitud optimaalsed mootori parameetrid. 3. Projekteeritud CAD keskkonnas pneumaatiline radiaalmootor. 4. Ostetud standardtooted, valmistatud ebastandartsed detailid ning koostatud füüsiline mootor. 5. Testitud mootorit ilma koormuseta. 6. Testitud mootorit koormusega masina all. 7. Võisteldud masinaga VIII. International Aventics Pneumobile Competition võistlusel, mille all on projekteeritud mootor. 8. Saavutatud VIII. International Aventics Pneumobile Competition konstruktsiooni kategoorias III koht. Tulevikus on planeeritud mootorit edasi arendada ning ka võistelda järgmise aasta võistlusel. 48
49 KASUTATUD KIRJANDUS 1. VIII. International Aventics Pneumobile Competition võistluse reeglid (formaat.pdf) Kättesaadav: ification_of_task ( ) 2. Ajamitehnika. Praktilised rakendused (formaat.pdf) Kättesaadav: ( ) 3. Rolling resistance, [www], Kättesaadav: ( ) 4. Drag coefficent, [www], Kättesaadav: ( ) 5. Tihedus, [www], Kättesaadav: ( ) 6. Drag, [www], Kättesaadav: ( ) 7. Gear efficiency comparison table, [www], Kättesaadav: ( ) 8. Roller chain, [www] Kättesaadav: ( ) 9. Bearing Friction, [www], Kättesaadav: ( ) 10. Flow cylinder, [www], Kättesaadav: ( ) 11. Autorite kollektiiv (2013) Mehaanika inseneri käsiraamat, Eesti, TTÜ kirjastus, lk Acceleration, [www] Kättesaadav: ( ) 13. Profile cylinder, series PRA, [www], Kättesaadav: ( ) 49
50 14. AP2, Rod clevis, [www], Kättesaadav: =511474_p62105 ( ) 15. MT5,MT6, Trunnion mounting, front or rear, [www], Kättesaadav: =511472_p61390 ( ) 16. Bevel gears, [www], Kättesaadav: ( ) 17. Chains, (formaat.pdf), Kättesaadav: lk 16 ( ) 18. Rack and pinion [www], Kättesaadav: ( ) 19. Straight engine, [www], Kättesaadav: ( ) 20. Radial engine, [www], Kättesaadav: ( ) 21. Data of Messer pressure reducer, [www], Kättesaadav: _messer_pressure_reductor ( ) 50
51 LISAD 51
52 Lisa A. Lihtlitsents Lihtlitsent lõputöö salvestamiseks ja üldsusele kättesaadavaks tegemiseks ning juhendaja(te) kinnitus lõputöö kaitsmisele lubamise kohta Mina, Marten Noorem, (autori nimi) sünniaeg , 1. annan Eesti Maaülikoolile tasuta loa (lihtlitsentsi) enda loodud lõputöö Pneumaatilise radiaalmootori projekt (lõputöö pealkiri) mille juhendaja(d) on, (juhendaja(te) nimi) 1.1. salvestamiseks säilitamise eesmärgil, 1.2. digiarhiivi DSpace lisamiseks ja 1.3. veebikeskkonnas üldsusele kättesaadavaks tegemiseks kuni autoriõiguse kehtivuse tähtaja lõppemiseni; 2. olen teadlik, et punktis 1 nimetatud õigused jäävad alles ka autorile; 3. kinnitan, et lihtlitsentsi andmisega ei rikuta teiste isikute intellektuaalomandi ega isikuandmete kaitse seadusest tulenevaid õigusi. Lõputöö autor (allkiri) Tartu, (kuupäev) Juhendaja(te) kinnitus lõputöö kaitsmisele lubamise kohta Luban lõputöö kaitsmisele. (juhendaja nimi ja allkiri) (kuupäev) (juhendaja nimi ja allkiri) (kuupäev) 52
53 Lisa B. Pneumoskeem 53
54 Lisa C. Tehnilised joonised 54
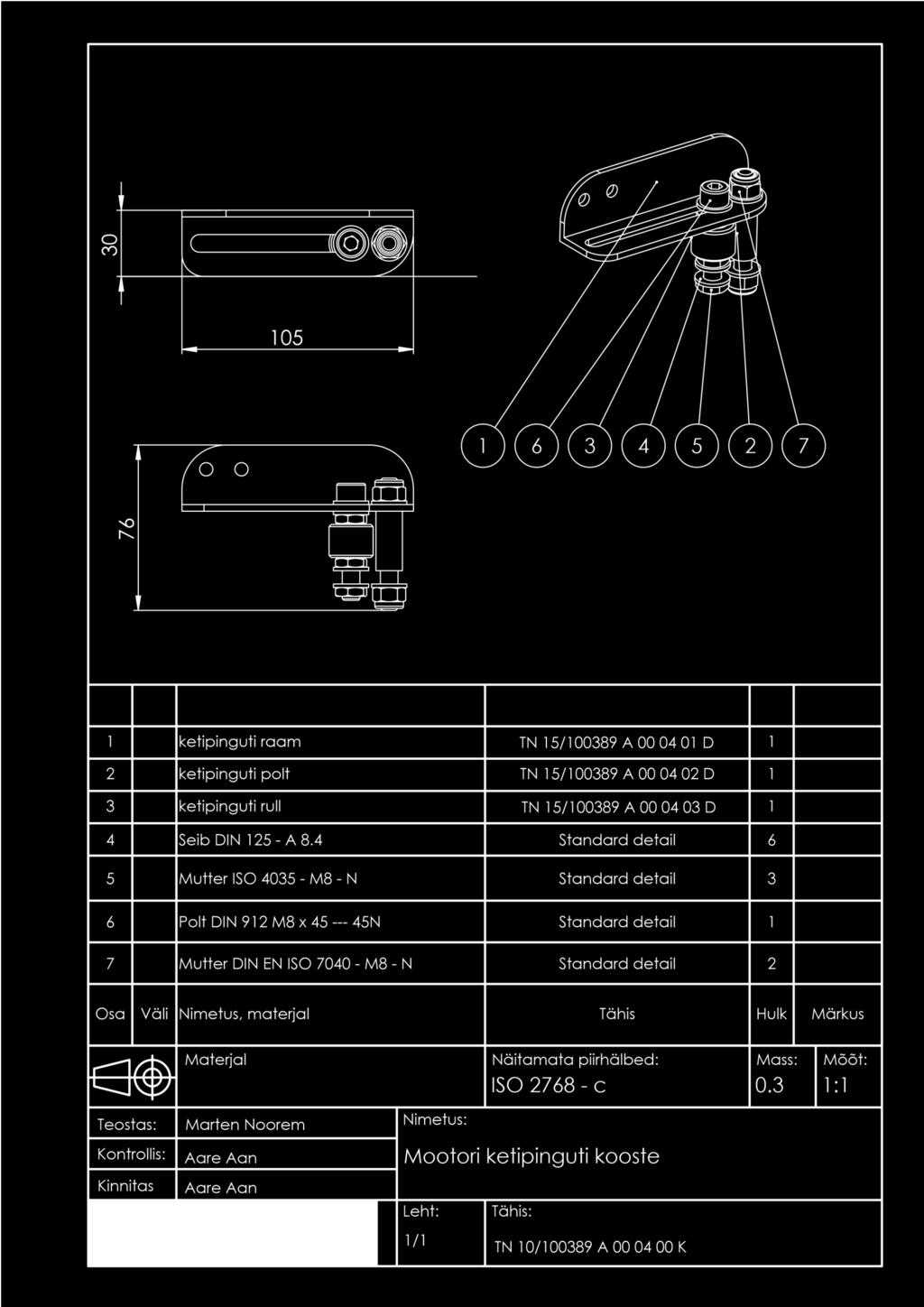
55 K P H7 22 h L Lõige B-B Mõõt 1 : Osa Väli Nimetus, materjal Tähis Hulk Märkus 6 2 DETAIL K Mõõt 1 : 1 25 h7 1 Silindri kooste TN 15/ A K 4 2 Jaoturite kooste TN 15/ A K 2 3 Reduktori kooste TN 15/ A K 1 4 Mootori kettipinguti kooste TN 15/ A K 1 5 Mootor raam 1 TN 15/ A D 1 6 Mootor raam 2 TN 15/ A D 1 7 Tikkpolt TN 15/ A D 27 8 väntvõlli sisu TN 15/ A D 1 M 9 keskmine võll TN 15/ A D 1 10 Keps TN 15/ A D 2 11 keps 1_võll TN 15/ A D 1 B B keps 2_võll TN 15/ A D 1 13 Hammasratas z=90 TN 15/ A D 1 14 Laagri pesa TN 15/ A D 2 15 soonega seib TN 15/ A D DETAIL L Mõõt 1 : 1 16 Radiaal tugilaager 51105_2_14 SKF Nõel laager NK_18_16_2_14 SKF NK Radiaal laager 62_22_2_14 SKF Nõel laager HK_1616_2RS_2_14 SKF HK h7 50 H7 20 Seib DIN A 10.5 Standard detail Seib DIN A 6.4 Standard detail Seib DIN A 19 Standard detail 2 23 Seib DIN B 10.5 Standard detail Seib DIN A 23 Standard detail 2 Mootori raam 2 eemaldatud Mutter EN ISO M10 - N Standard detail Polt M6 x N Standard detail Lukustusrõngas DIN x 1.2 Standard detail 2 28 Lukustusrõngas DIN x 1.2 Standard detail Polt ISO 4762 M6 x N Standard detail 8 30 Polt ISO 4762 M6 x N Standard detail Polt ISO 4762 M6 x N Standard detail Prisma liist A6 x 6 x 16 DIN 6885 Standard detail 4 33 kett 06B-1 Standard detail 1 Osa Väli Nimetus, materjal Tähis Hulk Märkus Materjal Näitamata piirhälbed: Mass: Mõõt: ISO m 48 1:5 9 Teostas: Marten Noorem Nimetus: Kontrollis: Mootori kooste DETAIL P Mõõt 1 : 1 DETAIL M Mõõt 2 : 5 Kinnitas Leht: 1/1 Tähis: TN 15/ A K
56 D 5 A A Lõige A-A H DETAIL D Mõõt 2 : 5 1 Laagripesa silindritele TN 15/ A D 2 2 1/4" 12 nurk Aventics 3 Silinder R Aventics 4 Nõel laager HK_1616_2RS HK RS 2 SKF 5 Silindri tagumine kinnitus Aventics 6 Silindri eesmine kinnitus Aventics Osa Väli Nimetus, materjal Tähis Hulk Märkus Materjal Näitamata piirhälbed: Mass: ISO m 1.5 Mõõt: 1:5 Teostas: Kontrollis: Kinnitas Marten Noorem Nimetus: Silindri kooste Leht: 1/1 Tähis: TN 15/ A K
57 ( ) Ra 6.8 5x45 1x A A xM6 12/15 R18 Ra H7 +0, Lõige A-A 18 4x M6 12/15 Teostas: Kontrollis: Kinnitas Materjal Alumiinium 1060 Marten Noorem Nimetus: 1/1 ISO m :1 Laagripesa silindritele Leht: Näitamata piirhälbed: Mass: Mõõt: Tähis: TN 15/ A D
58 Mõõt 1:5 181 Mõõt 1:5 Mõõt 1:5 1 Jaotur C Aventics 2 Summuti Aventics 3 1/4" 12 kiirliides Aventics 4 1/4" 12 nurk kiirliides Aventics 5 Mutter DIN EN ISO M5 - N Standard detail Keermelatt, M6, l=142mm Standard detail /8" 6 kiirliides Aventics Osa Väli Nimetus, materjal Tähis Hulk Märkus Materjal Näitamata piirhälbed: Mass: Mõõt: ISO c 5.0 1:2 Teostas: Kontrollis: Kinnitas Marten Noorem Nimetus: Jaoturite kooste Leht: Tähis: 1/1 TN 10/ A K
59 H7 m G9 h7 Vaade C A A Korpus TN 15/ A D 1 2 Laagrikorpus 1 TN 15/ A D 1 3 Laagrikorpus 2 TN 15/ A D 1 4 Reduktori sisemine laagripukk TN 15/ A D 2 5 Reduktori võll TN 15/ A D 2 6 Koonusrull laager X/Q X/Q 2 SKF DETAIL B 7 Radiaal laager 61804_2_ RS1 2 SKF 8 Ketiratas z=32 06B -1 1 Varson 4 9 Nurk hammasrattad Maedler 10 Ketiratas z=30 06B -1 1 Varson 1 11 Seib DIN A 6.4 Standard detail Washer DIN A 6.4 Standard detail 8 13 ISO 4762 M6 x N Standard detail 8 B ISO 4762 M6 x N Standard detail 4 Osa Väli Nimetus, materjal Tähis Hulk Märkus Materjal Näitamata piirhälbed: Mass: Mõõt: ISO m 6.9 1: Teostas: Kontrollis: Kinnitas Marten Noorem Nimetus: Reduktori kooste Lõige A-A C Leht: 1/1 Tähis: TN 10/ A K
60 Korpuse plaat 1 ( ) Ra Kõik faasitud äärtega kontaktpinnad keevitada s3 Korpuse plaat Korpuse plaat 4 Mõõt 1:5 Mõõt 1: Korpuse plaat 3 Korpuse plaat 5 Laser detailid, joonisel esitatud kabariit mõõtmed. Tootmisesse läheb DWG. Kõik mõõtmeteta väiksed avad d=5mm. Hiljem keermestus M6. Detailide omavahelised kontaktpinnad faasida 45* 3mm ulatuses. 6 6 Detailid keevitatakse kokku faasidest. NB! keevitada ainult väljast! Materjal Näitamata piirhälbed: Mass: Mõõt: 6 Teras 355 paksus 6mm ISO m 3.3 1:2 Teostas: Marten Noorem Nimetus: Kontrollis: Reduktori korpus Kinnitas Leht: Tähis: 1/1 TN 10/ A D
61 ( ) Ra 6.8 A 8x 6 3x45 Ra A R Lõige A-A Mõõt 1 : 2 H7 +0, Materjal Näitamata piirhälbed: Mass: Mõõt: Alumiinium 1060 ISO m 0.1 1:2 Teostas: Kontrollis: Kinnitas Marten Noorem Nimetus: Laagri korpus 1 Leht: 1/1 Tähis: TN 10/ A D
62 ( ) Ra 6.8 A 92 8x 6 Ra A R40 5x45 8 SECTION A-A H7 +0, Materjal Näitamata piirhälbed: Mass: Mõõt: Alumiinium 1060 ISO m :2 Teostas: Kontrollis: Kinnitas Marten Noorem Nimetus: Laagrikorpus 2 Leht: 1/1 Tähis: TN 10/ A D
63 ( ) Ra A Ra 1.6 H7 +0, A 28 Lõige A-A 4xM6 12/ ( ) - teatmemõõtmed NB! vastas küljel on samuti avad! Materjal Teras 355 paksus 10mm Näitamata piirhälbed: Mass: Mõõt: ISO m :2 Teostas: Kontrollis: Marten Noorem Nimetus: Reduktori sisemine laagripukk Kinnitas Leht: Tähis: 1/1 TN 10/ A D
64 2x1,30 H13 Ra 1.6 4,50 20 H7 +0, x1x h11 Materjal Näitamata piirhälbed: Mass: Mõõt: 42CrMo4 ISO m :1 Teostas: Kontrollis: Marten Noorem Nimetus: Reduktori võll Kinnitas Leht: 1/1 Tähis: TN 10/ A D
65
66 ( ) Ra 6.8 R R10 R R x 6 ( ) - teatmemõõtmed Teostas: Kontrollis: Materjal Näitamata piirhälbed: Mass: Mõõt: 30x30x3 teras 235 vinkel ISO c :1 Marten Noorem Nimetus: Kettipinguti raam Kinnitas Leht: Tähis: 1/1 TN 10/ A D
67 ( ) Ra M8x15 M8x x45 1x45 60 Materjal Näitamata piirhälbed: Mass: Mõõt: Teras 235 ISO c :1 Teostas: Kontrollis: Kinnitas Marten Noorem Nimetus: Ketipinguti polt Leht: Tähis: 1/1 TN 10/ A D ( ) Ra 6.8 1x45 A 1x A 15 Lõige A-A Materjal POM Näitamata piirhälbed: ISO c Mass: Mõõt: 1:1 Teostas: Marten Noorem Nimetus: Kontrollis: Ketipinguti rull Kinnitas Leht: Tähis: 1/1 TN 10/ A D
68 ( ) Ra x x 6 4x 6 27xM Laser detail, joonisel esitatud kabariit mõõtmed. Tootmisesse läheb DWG. Hiljem d=8.5mm avadele keermestus M10. Materjal Näitamata piirhälbed: Mass: Mõõt: EN AW paksus 6mm ISO m 6.0 1:10 Teostas: Kontrollis: Marten Noorem Nimetus: Mootori plaat 1 Kinnitas Leht: 1/1 Tähis: TN 10/ A D
69 ( ) Ra x 6 27x 10 8x 6 4x x Laser detail, joonisel esitatud kabariit mõõtmed. Tootmisesse läheb DWG. Teostas: Kontrollis: Kinnitas Materjal Näitamata piirhälbed: Mass: EN AW paksus 6mm ISO m 6.0 Marten Noorem Nimetus: Mootori plaat 2 Leht: 1/1 Tähis: TN 10/ A D Mõõt: 1:10
70 A 4 B 0,80 ( ) Ra 6.8 1x x45 M10x26 10 M10x A Lõige A-A Mõõt 1 : 1 DETAIL B Mõõt 2 : 1 Materjal Näitamata piirhälbed: Mass: Mõõt: POM ISO m :1 Teostas: Kontrollis: Kinnitas Marten Noorem Nimetus: Fikseerimis seib Leht: Tähis: 1/1 TN 10/ A D ( ) Ra Materjal Näitamata piirhälbed: Mass: Mõõt: Teras 235 ISO m :2 Teostas: Marten Noorem Nimetus: Kontrollis: Tikkpolt Kinnitas Leht: Tähis: 1/1 TN 10/ A D
71 ( ) Ra H7 +0,021 0 H7 +0,021 3x 22 0 Ra R37,50 131,50 57 Ra xR2 57 6xR15 4xR25 Materjal Teras 355 paksus 15mm Näitamata piirhälbed: Mass: Mõõt: ISO m :2 Teostas: Kontrollis: Kinnitas Marten Noorem Nimetus: Väntvõlli südamik Leht: 1/1 Tähis: TN 10/ A D
72 ( ) Ra , ,80 41,50 28, x6 P9 A A x1,30 H x1x45 90,50 17 h11 2x3,50 Lõige A-A Mõõt 1 : Materjal Näitamata piirhälbed: Mass: Mõõt: 42CrMo4 ISO m /1 Teostas: Kontrollis: Marten Noorem Nimetus: Keskmine võll Kinnitas Leht: Tähis: 1/1 TN 10/ A D
73 ( ) Ra R9 6 P9 20, P9 24, R11 4xR15 Materjal Näitamata piirhälbed: Mass: Mõõt: Teras 355 paksus 15mm ISO m :1 Teostas: Marten Noorem Nimetus: Kontrollis: Keps Kinnitas Leht: Tähis: 1/1 TN 10/ A D
74 ( ) Ra 6.8 Ra , h ,3 H13 8,5 6 P9 Lõige I-I Mõõt 1 : 1 H 1x45 22 h7-0 0,021 I I Lõige H-H Mõõt 1 : 1 H 4 47 Materjal Näitamata piirhälbed: Mass: Mõõt: 42CrMo4 ISO m :1 Teostas: Marten Noorem Nimetus: Kontrollis: Võll 1 Kinnitas Leht: Tähis: 1/1 TN 10/ A D
75 ( ) Ra 6.8 Ra 1.6 Ra 1.6 3,50 DETAIL C B x1x 45 C h7-0 0,021 A A B ,5 63,5 2x1,3 H13 2x 21 h11 6 P9 Lõige B-B 25 h7-0 0,021 Lõige A-A ,5 Teostas: Kontrollis: Kinnitas Materjal Näitamata piirhälbed: Mass: Mõõt: 42CrMo4 ISO m :1 Marten Noorem Nimetus: Võll 2 Leht: 1/1 Tähis: TN 10/ A D
76 ( ) Ra R139 Laser detail, joonisel esitatud kabariit mõõtmed. Tootmisesse läheb DWG. Materjal Näitamata piirhälbed: Mass: Mõõt: Teras 355 paksus 5mm ISO m :2 Teostas: Kontrollis: Marten Noorem Nimetus: Hammasratas z=90 Kinnitas Leht: Tähis: 1/1 TN 10/ A D

77 ( ) Ra 6.8 A 84 4x45 8xM6 10/12 Ra H7 +0, A R34 16 SECTION A-A 1x45 Teostas: Kontrollis: Kinnitas Materjal Näitamata piirhälbed: Mass: Mõõt: Alumiinium 1060 ISO m :1 Marten Noorem Nimetus: Laagripesa Leht: Tähis: 1/1 TN 10/ A D
Sissejuhatus mehhatroonikasse MHK0120
 Sissejuhatus mehhatroonikasse MHK0120 5. nädala loeng Raavo Josepson raavo.josepson@ttu.ee Pöördliikumine Kulgliikumine Kohavektor Ԧr Kiirus Ԧv = d Ԧr dt Kiirendus Ԧa = dv dt Pöördliikumine Pöördenurk
Sissejuhatus mehhatroonikasse MHK0120 5. nädala loeng Raavo Josepson raavo.josepson@ttu.ee Pöördliikumine Kulgliikumine Kohavektor Ԧr Kiirus Ԧv = d Ԧr dt Kiirendus Ԧa = dv dt Pöördliikumine Pöördenurk
Kasutusjuhend Dragon Winch vintsile DWM, DWH, DWT seeria Sisukord Üldised ohutusnõuded... 3 Vintsimise ohutusnõuded... 3 Kasulik teada... 4 Vintsimise
 Kasutusjuhend Dragon Winch vintsile DWM, DWH, DWT seeria Sisukord Üldised ohutusnõuded... 3 Vintsimise ohutusnõuded... 3 Kasulik teada... 4 Vintsimisel on hea teada... 5 Vintsi hooldus... 6 Garantii...
Kasutusjuhend Dragon Winch vintsile DWM, DWH, DWT seeria Sisukord Üldised ohutusnõuded... 3 Vintsimise ohutusnõuded... 3 Kasulik teada... 4 Vintsimisel on hea teada... 5 Vintsi hooldus... 6 Garantii...
A9RE06B.tmp
 Head Quarter accelerate the future Õlivabad kolbkompressorid Nüüd ka 100%-se koormatavusega www.gentilincompressors.com Professionaalsed õlivabad kompressorid RUUMI KOKKUHOID Algselt väljavenitatud vertikaalne
Head Quarter accelerate the future Õlivabad kolbkompressorid Nüüd ka 100%-se koormatavusega www.gentilincompressors.com Professionaalsed õlivabad kompressorid RUUMI KOKKUHOID Algselt väljavenitatud vertikaalne
VRB 2, VRB 3
 Tehniline andmeleht Sadulventiilid (PN 6) VR - tee ventiil, sise- ja väliskeere 3-tee ventiil, sise- ja väliskeere Kirjeldus Omadused Mullikindel konstruktsioon Mehaaniline snepperühendus täiturmootoriga
Tehniline andmeleht Sadulventiilid (PN 6) VR - tee ventiil, sise- ja väliskeere 3-tee ventiil, sise- ja väliskeere Kirjeldus Omadused Mullikindel konstruktsioon Mehaaniline snepperühendus täiturmootoriga
Praks 1
 Biomeetria praks 6 Illustreeritud (mittetäielik) tööjuhend Eeltöö 1. Avage MS Excel is oma kursuse ankeedivastuseid sisaldav andmestik, 2. lisage uus tööleht, nimetage see ümber leheküljeks Praks6 ja 3.
Biomeetria praks 6 Illustreeritud (mittetäielik) tööjuhend Eeltöö 1. Avage MS Excel is oma kursuse ankeedivastuseid sisaldav andmestik, 2. lisage uus tööleht, nimetage see ümber leheküljeks Praks6 ja 3.
Tehniline andmeleht Sadulventiilid (PN 16) VRG 2 2-tee ventiil, väliskeermega VRG 3 3-tee ventiil, väliskeermega Kirjeldus Ventiilid on kasutatavad ko
 VRG 2 2-tee ventiil, väliskeermega VRG 3 3-tee ventiil, väliskeermega Kirjeldus Ventiilid on kasutatavad ko") Tehniline andmeleht Sadulventiilid (PN 16) VRG 2 2-tee ventiil, väliskeermega VRG 3 3-tee ventiil, väliskeermega Kirjeldus Ventiilid on kasutatavad koos AMV(E) 335, AMV(E) 435 ja AMV(E) 438 SU täiturmootoritega.
Tehniline andmeleht Sadulventiilid (PN 16) VRG 2 2-tee ventiil, väliskeermega VRG 3 3-tee ventiil, väliskeermega Kirjeldus Ventiilid on kasutatavad koos AMV(E) 335, AMV(E) 435 ja AMV(E) 438 SU täiturmootoritega.
VRG 2, VRG 3
 Tehniline andmeleht Sadulventiilid (PN 16) 2-tee ventiil, väliskeermega 3-tee ventiil, väliskeermega Kirjeldus Omadused Mullikindel konstruktsioon Mehhaaniline snepperühendus täiturmootoriga MV(E) 335,
Tehniline andmeleht Sadulventiilid (PN 16) 2-tee ventiil, väliskeermega 3-tee ventiil, väliskeermega Kirjeldus Omadused Mullikindel konstruktsioon Mehhaaniline snepperühendus täiturmootoriga MV(E) 335,
efo09v2pke.dvi
 Eesti koolinoorte 56. füüsikaolümpiaad 17. jaanuar 2009. a. Piirkondlik voor. Põhikooli ülesanded 1. (VÄRVITILGAD LAUAL) Ühtlaselt ja sirgjooneliselt liikuva horisontaalse laua kohal on kaks paigalseisvat
Eesti koolinoorte 56. füüsikaolümpiaad 17. jaanuar 2009. a. Piirkondlik voor. Põhikooli ülesanded 1. (VÄRVITILGAD LAUAL) Ühtlaselt ja sirgjooneliselt liikuva horisontaalse laua kohal on kaks paigalseisvat
28 29
 28 29 CARGO TIPPER KÕRGE VÕIMEKUS MADAL RASKUSKESE Iga BJT haagis on konstrueeritud ühte eesmärki silmas pidades - pakkuda teile parimat. Haagised on valmistatud vastavalt klientide tagasisidele, lähtudes
28 29 CARGO TIPPER KÕRGE VÕIMEKUS MADAL RASKUSKESE Iga BJT haagis on konstrueeritud ühte eesmärki silmas pidades - pakkuda teile parimat. Haagised on valmistatud vastavalt klientide tagasisidele, lähtudes
Võistlusülesanne Vastutuulelaev Finaal
 Võistlusülesanne Vastutuulelaev Finaal CADrina 2016 võistlusülesannete näol on tegemist tekst-pilt ülesannetega, milliste lahendamiseks ei piisa ainult jooniste ülevaatamisest, vaid lisaks piltidele tuleb
Võistlusülesanne Vastutuulelaev Finaal CADrina 2016 võistlusülesannete näol on tegemist tekst-pilt ülesannetega, milliste lahendamiseks ei piisa ainult jooniste ülevaatamisest, vaid lisaks piltidele tuleb
Praks 1
 Biomeetria praks 6 Illustreeritud (mittetäielik) tööjuhend Eeltöö 1. Avage MS Excel is ankeedivastuseid sisaldav andmestik, 2. lisage uus tööleht, nimetage see ümber leheküljeks Praks6 ja 3. kopeerige
Biomeetria praks 6 Illustreeritud (mittetäielik) tööjuhend Eeltöö 1. Avage MS Excel is ankeedivastuseid sisaldav andmestik, 2. lisage uus tööleht, nimetage see ümber leheküljeks Praks6 ja 3. kopeerige
efo03v2pkl.dvi
 Eesti koolinoorte 50. füüsikaolümpiaad 1. veebruar 2003. a. Piirkondlik voor Põhikooli ülesannete lahendused NB! Käesoleval lahendustelehel on toodud iga ülesande üks õige lahenduskäik. Kõik alternatiivsed
Eesti koolinoorte 50. füüsikaolümpiaad 1. veebruar 2003. a. Piirkondlik voor Põhikooli ülesannete lahendused NB! Käesoleval lahendustelehel on toodud iga ülesande üks õige lahenduskäik. Kõik alternatiivsed
(10. kl. I kursus, Teisendamine, kiirusega, kesk.kiirusega \374lesanded)
") TEISENDAMINE Koostanud: Janno Puks 1. Massiühikute teisendamine Eesmärk: vajalik osata teisendada tonne, kilogramme, gramme ja milligramme. Teisenda antud massiühikud etteantud ühikusse: a) 0,25 t = kg
TEISENDAMINE Koostanud: Janno Puks 1. Massiühikute teisendamine Eesmärk: vajalik osata teisendada tonne, kilogramme, gramme ja milligramme. Teisenda antud massiühikud etteantud ühikusse: a) 0,25 t = kg
(Estonian) DM-RBCS Edasimüüja juhend MAANTEE MTB Rändamine City Touring/ Comfort Bike URBAN SPORT E-BIKE Kasseti ketiratas CS-HG400-9 CS-HG50-8
 DM-RBCS Edasimüüja juhend MAANTEE MTB Rändamine City Touring/ Comfort Bike URBAN SPORT E-BIKE Kasseti ketiratas CS-HG400-9 CS-HG50-8") (Estonian) DM-RBCS001-02 Edasimüüja juhend MAANTEE MTB Rändamine City Touring/ Comfort Bike URBAN SPORT E-BIKE Kasseti ketiratas CS-HG400-9 CS-HG50-8 SISUKORD OLULINE MÄRKUS... 3 OHUTUSE TAGAMINE... 4
(Estonian) DM-RBCS001-02 Edasimüüja juhend MAANTEE MTB Rändamine City Touring/ Comfort Bike URBAN SPORT E-BIKE Kasseti ketiratas CS-HG400-9 CS-HG50-8 SISUKORD OLULINE MÄRKUS... 3 OHUTUSE TAGAMINE... 4
VANASÕIDUKIKS TUNNUSTAMISE AKT Nr 62 Sõiduki olulised andmed Sõiduki mark Husqvarna Vanasõiduki klass Mudel ja modifikatsioon 282E Silverpil Värvus hõ
 VANASÕIDUKIKS TUNNUSTAMISE AKT Nr 62 Sõiduki olulised andmed Sõiduki mark Husqvarna Vanasõiduki klass Mudel ja modifikatsioon 282E Silverpil Värvus hõbehall Tehasetähis (VINkood) Valmistajamaa Rootsi Esmane
VANASÕIDUKIKS TUNNUSTAMISE AKT Nr 62 Sõiduki olulised andmed Sõiduki mark Husqvarna Vanasõiduki klass Mudel ja modifikatsioon 282E Silverpil Värvus hõbehall Tehasetähis (VINkood) Valmistajamaa Rootsi Esmane
Microsoft Word - TallinnLV_lihtsustatud_manual_asutuse_juhataja_ doc
 Tallinna Linnavalitsuse sõnumisaatja kasutusjuhend asutuse juhatajale Sisukord 1. Süsteemi sisenemine...2 2. Parooli lisamine ja vahetamine...2 3. Ametnike lisamine ametiasutuse juurde...2 4. Saatjanimede
Tallinna Linnavalitsuse sõnumisaatja kasutusjuhend asutuse juhatajale Sisukord 1. Süsteemi sisenemine...2 2. Parooli lisamine ja vahetamine...2 3. Ametnike lisamine ametiasutuse juurde...2 4. Saatjanimede
lvk04lah.dvi
 Lahtine matemaatikaülesannete lahendamise võistlus. veebruaril 004. a. Lahendused ja vastused Noorem rühm 1. Vastus: a) jah; b) ei. Lahendus 1. a) Kuna (3m+k) 3 7m 3 +7m k+9mk +k 3 3M +k 3 ning 0 3 0,
Lahtine matemaatikaülesannete lahendamise võistlus. veebruaril 004. a. Lahendused ja vastused Noorem rühm 1. Vastus: a) jah; b) ei. Lahendus 1. a) Kuna (3m+k) 3 7m 3 +7m k+9mk +k 3 3M +k 3 ning 0 3 0,
Microsoft Word - Suure thermori pass2.doc
 PAIGALDAMINE KASUTAMINE HOOLDUS SUUREMAHULISED 500-3000 L VEEBOILERID Need on sukel-ja keraamilise küttekehaga elektrilised veesoojendid. Võimalikud on variandid kus täiendavalt küttekehale on ka kesküttesüsteemiga
PAIGALDAMINE KASUTAMINE HOOLDUS SUUREMAHULISED 500-3000 L VEEBOILERID Need on sukel-ja keraamilise küttekehaga elektrilised veesoojendid. Võimalikud on variandid kus täiendavalt küttekehale on ka kesküttesüsteemiga
PAIGALDUSJUHEND DUŠINURK VESTA 1. Enne paigaldustööde alustamist veenduge, et elektrikaablid, veetorud vms ei jääks kruviaukude alla! 2. Puhastage sei
 PAIGALDUSJUHEND DUŠINURK VESTA 1. Enne paigaldustööde alustamist veenduge, et elektrikaablid, veetorud vms ei jääks kruviaukude alla! 2. Puhastage seinad ja põrand enne dušinurga paigaldamist! 3. Kasutage
PAIGALDUSJUHEND DUŠINURK VESTA 1. Enne paigaldustööde alustamist veenduge, et elektrikaablid, veetorud vms ei jääks kruviaukude alla! 2. Puhastage seinad ja põrand enne dušinurga paigaldamist! 3. Kasutage
VL1_praks6_2010k
 Biomeetria praks 6 Illustreeritud (mittetäielik) tööjuhend Eeltöö 1. Avage MS Excel is oma kursuse ankeedivastuseid sisaldav andmestik, 2. lisage uus tööleht (Insert / Lisa -> Worksheet / Tööleht), nimetage
Biomeetria praks 6 Illustreeritud (mittetäielik) tööjuhend Eeltöö 1. Avage MS Excel is oma kursuse ankeedivastuseid sisaldav andmestik, 2. lisage uus tööleht (Insert / Lisa -> Worksheet / Tööleht), nimetage
EUROOPA KOMISJON Brüssel, XXX [ ](2013) XXX draft KOMISJONI DIREKTIIV / /EL, XXX, millega muudetakse Euroopa Parlamendi ja nõukogu direktiivi 2000/25/
 XXX draft KOMISJONI DIREKTIIV / /EL, XXX, millega muudetakse Euroopa Parlamendi ja nõukogu direktiivi 2000/25/](/thumbs/101/148130357.jpg "EUROOPA KOMISJON Brüssel, XXX [ ](2013) XXX draft KOMISJONI DIREKTIIV / /EL, XXX, millega muudetakse Euroopa Parlamendi ja nõukogu direktiivi 2000/25/") EUROOPA KOMISJON Brüssel, XXX [ ](2013) XXX draft KOMISJONI DIREKTIIV / /EL, XXX, millega muudetakse Euroopa Parlamendi ja nõukogu direktiivi 2000/25/EÜ (põllumajandus- ja metsatraktorite mootoritest paisatavate
EUROOPA KOMISJON Brüssel, XXX [ ](2013) XXX draft KOMISJONI DIREKTIIV / /EL, XXX, millega muudetakse Euroopa Parlamendi ja nõukogu direktiivi 2000/25/EÜ (põllumajandus- ja metsatraktorite mootoritest paisatavate
Microsoft Word - XTOP026.doc
 XTOP026 Enne seadme kasutamist lugege kasutusjuhend hoolikalt läbi ja järgige kõiki juhiseid. Hoidke juhend hilisemaks vajaduseks alles. MOOTORRATTA TÕSTUK Kasutusjuhend OLULINE! EST LUGEGE NEED JUHISED
XTOP026 Enne seadme kasutamist lugege kasutusjuhend hoolikalt läbi ja järgige kõiki juhiseid. Hoidke juhend hilisemaks vajaduseks alles. MOOTORRATTA TÕSTUK Kasutusjuhend OLULINE! EST LUGEGE NEED JUHISED
Technology Esimene PowerSense tehnoloogiaga elektromehaaniline tööriist
 www.klauke.com Technology Esimene PowerSense tehnoloogiaga elektromehaaniline tööriist Ajad muutuvad. Kompaktne ja maksimaalselt tõhus Kõikjal kus vaja kiiret, kergekaalulist ja effektiivset tööriista
www.klauke.com Technology Esimene PowerSense tehnoloogiaga elektromehaaniline tööriist Ajad muutuvad. Kompaktne ja maksimaalselt tõhus Kõikjal kus vaja kiiret, kergekaalulist ja effektiivset tööriista
Praks 1
 Biomeetria praks 3 Illustreeritud (mittetäielik) tööjuhend Eeltöö 1. Avage MS Excel is oma kursuse ankeedivastuseid sisaldav andmestik, 2. lisage uus tööleht, 3. nimetage see ümber leheküljeks Praks3 ja
Biomeetria praks 3 Illustreeritud (mittetäielik) tööjuhend Eeltöö 1. Avage MS Excel is oma kursuse ankeedivastuseid sisaldav andmestik, 2. lisage uus tööleht, 3. nimetage see ümber leheküljeks Praks3 ja
Antennide vastastikune takistus
 Antennide vastastikune takistus Eelmises peatükis leidsime antenni kiirgustakistuse arvestamata antenni lähedal teisi objekte. Teised objektid, näiteks teised antennielemendid, võivad aga mõjutada antenni
Antennide vastastikune takistus Eelmises peatükis leidsime antenni kiirgustakistuse arvestamata antenni lähedal teisi objekte. Teised objektid, näiteks teised antennielemendid, võivad aga mõjutada antenni
Tala dimensioonimine vildakpaindel
 Tala dimensioonimine vildakpaindel Ülesanne Joonisel 9 kujutatud okaspuidust konsool on koormatud vertikaaltasandis ühtlase lauskoormusega p ning varda teljega risti mõjuva kaldjõuga (-jõududega) F =pl.
Tala dimensioonimine vildakpaindel Ülesanne Joonisel 9 kujutatud okaspuidust konsool on koormatud vertikaaltasandis ühtlase lauskoormusega p ning varda teljega risti mõjuva kaldjõuga (-jõududega) F =pl.
Taskuprinter KASUTUSJUHEND
 Taskuprinter KASUTUSJUHEND Täname, et ostsite taskuprinteri Polaroid Mint. Käesoleva kasutusjuhendi eesmärk on anda teile juhiseid toote ohutuks kasutamiseks ja et see ei kujutaks endast kasutajale mingit
Taskuprinter KASUTUSJUHEND Täname, et ostsite taskuprinteri Polaroid Mint. Käesoleva kasutusjuhendi eesmärk on anda teile juhiseid toote ohutuks kasutamiseks ja et see ei kujutaks endast kasutajale mingit
raamat5_2013.pdf
 Peatükk 5 Prognoosiintervall ja Usaldusintervall 5.1 Prognoosiintervall Unustame hetkeks populatsiooni parameetrite hindamise ja pöördume tagasi üksikvaatluste juurde. On raske ennustada, milline on huvipakkuva
Peatükk 5 Prognoosiintervall ja Usaldusintervall 5.1 Prognoosiintervall Unustame hetkeks populatsiooni parameetrite hindamise ja pöördume tagasi üksikvaatluste juurde. On raske ennustada, milline on huvipakkuva
Pneumosilindri ning pneumoajami arvutamine
 Virumaa Kolledž Real-ja tehnikateaduste keskus HÜDRO- ja PNEUMOAJAMID RAE 0900 PNEUMOSÜSTEEMI PROJEKTEERIMINE ja SKEEMI KOOSTAMINE Autor: Matrikli nr: Rühm: Juhendaja: G.Arjassov Kohtla-Järve 2019 LÄHTEADMED
Virumaa Kolledž Real-ja tehnikateaduste keskus HÜDRO- ja PNEUMOAJAMID RAE 0900 PNEUMOSÜSTEEMI PROJEKTEERIMINE ja SKEEMI KOOSTAMINE Autor: Matrikli nr: Rühm: Juhendaja: G.Arjassov Kohtla-Järve 2019 LÄHTEADMED
Euroopa Liidu Nõukogu Brüssel, 24. september 2015 (OR. en) 12353/15 ADD 2 ENV 586 ENT 199 MI 583 SAATEMÄRKUSED Saatja: Kättesaamise kuupäev: Saaja: Eu
 12353/15 ADD 2 ENV 586 ENT 199 MI 583 SAATEMÄRKUSED Saatja: Kättesaamise kuupäev: Saaja: Eu") Euroopa Liidu Nõukogu Brüssel, 24. september 2015 (OR. en) 12353/15 ADD 2 ENV 586 ENT 199 MI 583 SAATEMÄRKUSED Saatja: Kättesaamise kuupäev: Saaja: Euroopa Komisjon 23. september 2015 Nõukogu peasekretariaat
Euroopa Liidu Nõukogu Brüssel, 24. september 2015 (OR. en) 12353/15 ADD 2 ENV 586 ENT 199 MI 583 SAATEMÄRKUSED Saatja: Kättesaamise kuupäev: Saaja: Euroopa Komisjon 23. september 2015 Nõukogu peasekretariaat
(Estonian) DM-RCFC Edasimüüja juhend MAANTEE MTB Rändamine City Touring/ Comfort Bike URBAN SPORT E-BIKE Esihammasratas Ilma sarjata FC-RS400 FC
 DM-RCFC Edasimüüja juhend MAANTEE MTB Rändamine City Touring/ Comfort Bike URBAN SPORT E-BIKE Esihammasratas Ilma sarjata FC-RS400 FC") (Estonian) DM-RCFC001-02 Edasimüüja juhend MAANTEE MTB Rändamine City Touring/ Comfort Bike URBAN SPORT E-BIKE Esihammasratas Ilma sarjata FC-RS400 FC-RS510 Keskjooks BB-RS500 BB-RS500-PB SISUKORD OLULINE
(Estonian) DM-RCFC001-02 Edasimüüja juhend MAANTEE MTB Rändamine City Touring/ Comfort Bike URBAN SPORT E-BIKE Esihammasratas Ilma sarjata FC-RS400 FC-RS510 Keskjooks BB-RS500 BB-RS500-PB SISUKORD OLULINE
4. Kuumaveeboilerid ja akumulatsioonipaagid STORACELL Kuumaveeboilerid STORACELL ST 120-2E, ST 160-2E...88 STORACELL SKB 160, STORACELL SK 12
 4. Kuumaveeboilerid ja akumulatsioonipaagid STORACELL Kuumaveeboilerid STORACELL ST 120-2E, ST 160-2E...88 STORACELL SKB 160, 200...89 STORACELL SK 120-5ZB, SK 160-5ZB, SK 200-5ZB...90 STORACELL SK 300-5ZB,
4. Kuumaveeboilerid ja akumulatsioonipaagid STORACELL Kuumaveeboilerid STORACELL ST 120-2E, ST 160-2E...88 STORACELL SKB 160, 200...89 STORACELL SK 120-5ZB, SK 160-5ZB, SK 200-5ZB...90 STORACELL SK 300-5ZB,
EESTI MEISTRIVÕISTLUSED PONIDE TAKISTUSSÕIDUS 2005
 Lagedi Treeningvõistlus ja Ülikerge Derby JUHEND Toimumise aeg ja koht: Harjumaa 30.07.2016 Lagedi Ratsaspordikooli võistlusväljak, Lagedi, Võistlustingimused: Võistlusväljak Parkuur nr. 1-4 - liivaplats;
Lagedi Treeningvõistlus ja Ülikerge Derby JUHEND Toimumise aeg ja koht: Harjumaa 30.07.2016 Lagedi Ratsaspordikooli võistlusväljak, Lagedi, Võistlustingimused: Võistlusväljak Parkuur nr. 1-4 - liivaplats;
Tarvikud _ Puhurid ja vaakumpumbad INW külgkanaliga Air and Vacuum Components in-eco.co.ee
 Tarvikud _ Puhurid ja vaakumpumbad INW külgkanaliga Air and Vacuum Components in-eco.co.ee IN-ECO, spol. s r.o. Radlinského 13 T +421 44 4304662 F +421 44 4304663 E info@in-eco.sk Õhufiltrid integreeritud
Tarvikud _ Puhurid ja vaakumpumbad INW külgkanaliga Air and Vacuum Components in-eco.co.ee IN-ECO, spol. s r.o. Radlinského 13 T +421 44 4304662 F +421 44 4304663 E info@in-eco.sk Õhufiltrid integreeritud
(Estonian) DM-MAFC Edasimüüja juhend ROAD MTB Trekking City Touring / Comfort Bike URBAN SPORT E-BIKE Esihammasratas MTB XTR FC-M9000 FC-M9020 K
 DM-MAFC Edasimüüja juhend ROAD MTB Trekking City Touring / Comfort Bike URBAN SPORT E-BIKE Esihammasratas MTB XTR FC-M9000 FC-M9020 K") (Estonian) DM-MAFC001-01 Edasimüüja juhend ROAD MTB Trekking City Touring / Comfort Bike URBAN SPORT E-BIKE Esihammasratas MTB XTR FC-M9000 FC-M9020 Keskjooks SM-BB93 SM-BB94-41A SISUKORD OLULINE MÄRKUS...
(Estonian) DM-MAFC001-01 Edasimüüja juhend ROAD MTB Trekking City Touring / Comfort Bike URBAN SPORT E-BIKE Esihammasratas MTB XTR FC-M9000 FC-M9020 Keskjooks SM-BB93 SM-BB94-41A SISUKORD OLULINE MÄRKUS...
HD 13/12-4 ST Ruumisäästlikud, statsionaarsed kõrgsurvepesurid Kärcherilt, millel on kuni 6 varustuspunkti, mida saab vastavalt vajadusele individuaal
 Ruumisäästlikud, statsionaarsed kõrgsurvepesurid Kärcherilt, millel on kuni 6 varustuspunkti, mida saab vastavalt vajadusele individuaalselt konfigureerida, ning mis on äärmiselt kulumiskindlad. 1 2 3
Ruumisäästlikud, statsionaarsed kõrgsurvepesurid Kärcherilt, millel on kuni 6 varustuspunkti, mida saab vastavalt vajadusele individuaalselt konfigureerida, ning mis on äärmiselt kulumiskindlad. 1 2 3
Remote Desktop Redirected Printer Doc
 VI OSA, 10. klass füüsika Ühtlaselt muutuv liikumine ja kiirendus Ühtlaselt muutuv liikumine on mitteühtlase liikumise eriliik. Ühtlaselt muutuv liikumine on selline liikumine, mille puhul keha kiirus
VI OSA, 10. klass füüsika Ühtlaselt muutuv liikumine ja kiirendus Ühtlaselt muutuv liikumine on mitteühtlase liikumise eriliik. Ühtlaselt muutuv liikumine on selline liikumine, mille puhul keha kiirus
est_002575_DM-FC indd
 (Estonian) DM-FC0001-00 Edasimüüja juhend FC-M820 / FC-M825 SM-BB71 / SM-CR82 OLULINE MÄRKUS See edasimüüja juhend on mõeldud eelkõige professionaalsetele jalgrattamehaanikutele. Kasutajad, kes ei ole
(Estonian) DM-FC0001-00 Edasimüüja juhend FC-M820 / FC-M825 SM-BB71 / SM-CR82 OLULINE MÄRKUS See edasimüüja juhend on mõeldud eelkõige professionaalsetele jalgrattamehaanikutele. Kasutajad, kes ei ole
vv05lah.dvi
 IMO 05 Eesti võistkonna valikvõistlus 3. 4. aprill 005 Lahendused ja vastused Esimene päev 1. Vastus: π. Vaatleme esiteks juhtu, kus ringjooned c 1 ja c asuvad sirgest l samal pool (joonis 1). Olgu O 1
IMO 05 Eesti võistkonna valikvõistlus 3. 4. aprill 005 Lahendused ja vastused Esimene päev 1. Vastus: π. Vaatleme esiteks juhtu, kus ringjooned c 1 ja c asuvad sirgest l samal pool (joonis 1). Olgu O 1
I klassi õlipüüdur kasutusjuhend
 I-KLASSI ÕLIPÜÜDURITE PAIGALDUS- JA HOOLDUSJUHEND PÜÜDURI DEFINITSIOON JPR -i õlipüüdurite ülesandeks on sadevee või tööstusliku heitvee puhastamine heljumist ja õlijääkproduktidest. Püüduri ülesehitus
I-KLASSI ÕLIPÜÜDURITE PAIGALDUS- JA HOOLDUSJUHEND PÜÜDURI DEFINITSIOON JPR -i õlipüüdurite ülesandeks on sadevee või tööstusliku heitvee puhastamine heljumist ja õlijääkproduktidest. Püüduri ülesehitus
Lisa I_Müra modelleerimine
 LISA I MÜRA MODELLEERIMINE Lähteandmed ja metoodika Lähteandmetena kasutatakse AS K-Projekt poolt koostatud võimalikke eskiislahendusi (trassivariandid A ja B) ning liiklusprognoosi aastaks 2025. Kuna
LISA I MÜRA MODELLEERIMINE Lähteandmed ja metoodika Lähteandmetena kasutatakse AS K-Projekt poolt koostatud võimalikke eskiislahendusi (trassivariandid A ja B) ning liiklusprognoosi aastaks 2025. Kuna
Microsoft Word - 56ylesanded1415_lõppvoor
 1. 1) Iga tärnike tuleb asendada ühe numbriga nii, et tehe oleks õige. (Kolmekohaline arv on korrutatud ühekohalise arvuga ja tulemuseks on neljakohaline arv.) * * 3 * = 2 * 1 5 Kas on õige, et nii on
1. 1) Iga tärnike tuleb asendada ühe numbriga nii, et tehe oleks õige. (Kolmekohaline arv on korrutatud ühekohalise arvuga ja tulemuseks on neljakohaline arv.) * * 3 * = 2 * 1 5 Kas on õige, et nii on
efo03v2kkl.dvi
 Eesti koolinoorte 50. füüsikaolümpiaad 1. veebruar 2003. a. Piirkondlik voor Gümnaasiumi ülesannete lahendused NB! Käesoleval lahendustelehel on toodud iga ülesande üks õige lahenduskäik. Kõik alternatiivsed
Eesti koolinoorte 50. füüsikaolümpiaad 1. veebruar 2003. a. Piirkondlik voor Gümnaasiumi ülesannete lahendused NB! Käesoleval lahendustelehel on toodud iga ülesande üks õige lahenduskäik. Kõik alternatiivsed
PÄRNU TÄISKASVANUTE GÜMNAASIUM ESITLUSE KOOSTAMISE JUHEND Pärnu 2019
 PÄRNU TÄISKASVANUTE GÜMNAASIUM ESITLUSE KOOSTAMISE JUHEND Pärnu 2019 SISUKORD 1. SLAIDIESITLUS... 3 1.1. Esitlustarkvara... 3 1.2. Slaidiesitluse sisu... 3 1.3. Slaidiesitluse vormistamine... 4 1.3.1 Slaidid...
PÄRNU TÄISKASVANUTE GÜMNAASIUM ESITLUSE KOOSTAMISE JUHEND Pärnu 2019 SISUKORD 1. SLAIDIESITLUS... 3 1.1. Esitlustarkvara... 3 1.2. Slaidiesitluse sisu... 3 1.3. Slaidiesitluse vormistamine... 4 1.3.1 Slaidid...
Microsoft Word - Raudhobu eestikeelne tootekataloog.doc
 RAUDHOBU Produktinformation Tootekataloog 2008 Utgåva 1 Nr. 2 2008 1 IH 2055 Std. 5,5 Hj. Art. Nr. 968 74 35-5,5 hj võimsusega Honda 4 takti mootor. Juhtimine käepidemelt käepidemel gaas ja pidur. Edasi
RAUDHOBU Produktinformation Tootekataloog 2008 Utgåva 1 Nr. 2 2008 1 IH 2055 Std. 5,5 Hj. Art. Nr. 968 74 35-5,5 hj võimsusega Honda 4 takti mootor. Juhtimine käepidemelt käepidemel gaas ja pidur. Edasi
SPORTident Air+
 Tarmo Klaar 2012-2013 Esimene koolitus Eestis 2012, Põlvas Ülevaade Uus riistvara Vana tarkvara Proovime kasutada, näited Põhineb hetkel teadaoleval funktsionaalsusel. Tootja ei ole veel lõplikku versiooni
Tarmo Klaar 2012-2013 Esimene koolitus Eestis 2012, Põlvas Ülevaade Uus riistvara Vana tarkvara Proovime kasutada, näited Põhineb hetkel teadaoleval funktsionaalsusel. Tootja ei ole veel lõplikku versiooni
DELTA kihtplastikuga kaetud kasvuhoone 2,2 м 2,5 м 2,2 м Tehniline leht lk. 2-5 Paigaldusjuhend lk ET
 DELTA kihtplastikuga kaetud kasvuhoone 2,2 м 2,5 м 2,2 м Tehniline leht lk. 2-5 Paigaldusjuhend lk. 6-20 ET TEHNILINE LEHT/KASVUHOONE «DELTA»! Kasvuhoone paigaldamisel ja kasutamisel pidage rangelt kinni
DELTA kihtplastikuga kaetud kasvuhoone 2,2 м 2,5 м 2,2 м Tehniline leht lk. 2-5 Paigaldusjuhend lk. 6-20 ET TEHNILINE LEHT/KASVUHOONE «DELTA»! Kasvuhoone paigaldamisel ja kasutamisel pidage rangelt kinni
Microsoft Word - P6_metsamasinate juhtimine ja seadistamine FOP kutsekeskharidus statsionaarne
 MOODULI RAKENDUSKAVA Sihtrühm: forvarderioperaatori 4. taseme kutsekeskhariduse taotlejad Õppevorm: statsionaarne Moodul nr 6 Mooduli vastutaja: Mooduli õpetajad: Metsamasinate juhtimine ja seadistamine
MOODULI RAKENDUSKAVA Sihtrühm: forvarderioperaatori 4. taseme kutsekeskhariduse taotlejad Õppevorm: statsionaarne Moodul nr 6 Mooduli vastutaja: Mooduli õpetajad: Metsamasinate juhtimine ja seadistamine
TALLINNA TEHNIKAÜLIKOOL RAE 0270 Masinaehitustehnoloogia projekt ELEKTRIAJAMIGA TRUMMELVINTS ÜLIÕPILANE: KOOD: JUHENDAJA: Kotla-Järve 2018
 TALLINNA TEHNIKAÜLIKOOL RAE 070 Masinaehitustehnoloogia projekt ELEKTRIAJAMIGA TRUMMELVINTS ÜLIÕPILANE: KOOD: JUHENDAJA: Kotla-Järve 018 Üliõpilane... Üliõpilaskood... RAE 070 - Masinaehitustehnoloogia
TALLINNA TEHNIKAÜLIKOOL RAE 070 Masinaehitustehnoloogia projekt ELEKTRIAJAMIGA TRUMMELVINTS ÜLIÕPILANE: KOOD: JUHENDAJA: Kotla-Järve 018 Üliõpilane... Üliõpilaskood... RAE 070 - Masinaehitustehnoloogia
Septik
 Septik Ecolife 2000 paigaldusjuhend 1. ASUKOHT Septiku asukoha valikul tuleb arvestada järgmiste asjaoludega: pinnase liik, pinnavormid, põhjavee tase, krundi piirid ja vahemaad veekogudeni. Asukoha valikul
Septik Ecolife 2000 paigaldusjuhend 1. ASUKOHT Septiku asukoha valikul tuleb arvestada järgmiste asjaoludega: pinnase liik, pinnavormid, põhjavee tase, krundi piirid ja vahemaad veekogudeni. Asukoha valikul
Caterpillar Inc. 100 NE Adams Street, Peoria, IL USA Meedianumber U9NE8460 Tegevusdokument Lisateave GRADE süsteemi komponentide nõuetele vastav
 Tegevusdokument Lisateave GRADE süsteemi komponentide nõuetele vastavuse teave 1 Sisukord lk Ohutusmärgid ja -sildid... 3 Ohutusteated... 4 Muud sildid... 5 Üldine ohuteave... 6 Edastamine... 6 Sissejuhatus...
Tegevusdokument Lisateave GRADE süsteemi komponentide nõuetele vastavuse teave 1 Sisukord lk Ohutusmärgid ja -sildid... 3 Ohutusteated... 4 Muud sildid... 5 Üldine ohuteave... 6 Edastamine... 6 Sissejuhatus...
DUŠINURK MILDA PAIGALDUSJUHEND 1. Enne paigaldustööde alustamist veenduge, et elektrikaablid, veetorud vms ei jääks kruviaukude alla! 2. Puhastage sei
 DUŠINURK MILDA PAIGALDUSJUHEND 1. Enne paigaldustööde alustamist veenduge, et elektrikaablid, veetorud vms ei jääks kruviaukude alla! 2. Puhastage seinad ja põrand enne dušinurga paigaldamist! 3. Kasutage
DUŠINURK MILDA PAIGALDUSJUHEND 1. Enne paigaldustööde alustamist veenduge, et elektrikaablid, veetorud vms ei jääks kruviaukude alla! 2. Puhastage seinad ja põrand enne dušinurga paigaldamist! 3. Kasutage
Juhend nutiterminali seadistamiseks ja kaardimaksete vastuvõtmiseks Ingenico Link/2500 ja icmp
 Juhend nutiterminali seadistamiseks ja kaardimaksete vastuvõtmiseks Ingenico Link/2500 ja icmp Terminali seadistamine Lülita telefonis või tahvelarvutis (edaspidi telefonis) sisse Bluetooth. (1) 1 1 Mudel
Juhend nutiterminali seadistamiseks ja kaardimaksete vastuvõtmiseks Ingenico Link/2500 ja icmp Terminali seadistamine Lülita telefonis või tahvelarvutis (edaspidi telefonis) sisse Bluetooth. (1) 1 1 Mudel
Microsoft Word - Toetuste veebikaardi juhend
 Toetuste veebikaardi juhend Toetuste veebikaardi ülesehitus Joonis 1 Toetuste veebikaardi vaade Toetuste veebikaardi vaade jaguneb tinglikult kaheks: 1) Statistika valikute osa 2) Kaardiaken Statistika
Toetuste veebikaardi juhend Toetuste veebikaardi ülesehitus Joonis 1 Toetuste veebikaardi vaade Toetuste veebikaardi vaade jaguneb tinglikult kaheks: 1) Statistika valikute osa 2) Kaardiaken Statistika
PowerPoint Presentation
 Avaandmed Urmas Sinisalu Mis on avaandmed? Alus vs. Kohustus Avaandmed on kõigile vabalt ja avalikult kasutamiseks antud masinloetaval kujul andmed, millel puuduvad kasutamist ning levitamist takistavad
Avaandmed Urmas Sinisalu Mis on avaandmed? Alus vs. Kohustus Avaandmed on kõigile vabalt ja avalikult kasutamiseks antud masinloetaval kujul andmed, millel puuduvad kasutamist ning levitamist takistavad
PowerPoint-Präsentation
 TJ SOLAR 7 head omadust ühes kollektoris TJ SOLAR INFOLEHT TJ SOLAR toote head omadused TJ SOLAR kollektori spetsifikatsioon Kasutegur Konstruktsioon Paigaldamine ja kinnitamine TJ SOLAR pakend TJ SOLAR
TJ SOLAR 7 head omadust ühes kollektoris TJ SOLAR INFOLEHT TJ SOLAR toote head omadused TJ SOLAR kollektori spetsifikatsioon Kasutegur Konstruktsioon Paigaldamine ja kinnitamine TJ SOLAR pakend TJ SOLAR
5/8/ Dacia LOGAN Hinnad ja varustused LOGAN HINNAKIRI VARUST
 Hinnad ja varustused LOGAN HINNAKIRI 02.04.2019 VARUSTUSTASE MUDELI KOOD KERE MOOTOR KÜTUS KW/HJ KÄIGUKAST HIND (EUR) ACCESS LO2-AC75GEC Sedaan SCe 75 Bensiin 54 (73) / 6 300 manuaal 7 290 AMBIANCE LO2-AM75GEC
Hinnad ja varustused LOGAN HINNAKIRI 02.04.2019 VARUSTUSTASE MUDELI KOOD KERE MOOTOR KÜTUS KW/HJ KÄIGUKAST HIND (EUR) ACCESS LO2-AC75GEC Sedaan SCe 75 Bensiin 54 (73) / 6 300 manuaal 7 290 AMBIANCE LO2-AM75GEC
Kuidas vahetada esimesi suspensiooni vedrusid autol VOLKSWAGEN TOURAN 1
 Sooritage asendamine järgnevas järjekorras: 1 Vahetage Volkswagen Touran 1 vedrud paarikaupa. 2 Pingutage seisupiduri hooba. 3 Asetage tõkiskingad tagumiste rataste taha. Lõdvendage ratta kinnituspolte.
Sooritage asendamine järgnevas järjekorras: 1 Vahetage Volkswagen Touran 1 vedrud paarikaupa. 2 Pingutage seisupiduri hooba. 3 Asetage tõkiskingad tagumiste rataste taha. Lõdvendage ratta kinnituspolte.
C-SEERIA JA VJATKA-SEERIA LÄBIVOOLUKUIVATID
 C-SEERIA JA VJATKA-SEERIA LÄBIVOOLUKUIVATID C-SEERIA LÄBIVOOLUKUIVATID TÕHUSAKS JA ÜHTLASEKS VILJA KUIVATAMISEKS Mepu kõrgtehnoloogilised, pideva vooluga, sooja õhuga kuivatid kuivatavad vilja õrnalt,
C-SEERIA JA VJATKA-SEERIA LÄBIVOOLUKUIVATID C-SEERIA LÄBIVOOLUKUIVATID TÕHUSAKS JA ÜHTLASEKS VILJA KUIVATAMISEKS Mepu kõrgtehnoloogilised, pideva vooluga, sooja õhuga kuivatid kuivatavad vilja õrnalt,
Mehaanilised seemnekülvikud Mehaanilised seemnekülvikud EcoLine, ProfiLine i ja MasterLine Moving agriculture ahead
 Mehaanilised seemnekülvikud Mehaanilised seemnekülvikud EcoLine, ProfiLine i ja MasterLine Moving agriculture ahead EcoLine Kergekaaluline ja täpne Ideaalne tööriist väikese ja keskmise suurusega farmidele.
Mehaanilised seemnekülvikud Mehaanilised seemnekülvikud EcoLine, ProfiLine i ja MasterLine Moving agriculture ahead EcoLine Kergekaaluline ja täpne Ideaalne tööriist väikese ja keskmise suurusega farmidele.
HCB_hinnakiri2017_kodukale
 Betooni baashinnakiri Hinnakiri kehtib alates 01.04.2016 Töödeldavus S3 Töödeldavus S4 / m 3 /m 3 km-ga / m 3 /m 3 km-ga C 8/10 69 83 71 85 C 12/15 73 88 75 90 C 16/20 75 90 77 92 C 20/25 78 94 80 96 C
Betooni baashinnakiri Hinnakiri kehtib alates 01.04.2016 Töödeldavus S3 Töödeldavus S4 / m 3 /m 3 km-ga / m 3 /m 3 km-ga C 8/10 69 83 71 85 C 12/15 73 88 75 90 C 16/20 75 90 77 92 C 20/25 78 94 80 96 C
(Estonian) DM-FC Edasimüüja juhend ROAD MTB Trekking City Touring/ Comfort Bike URBAN SPORT E-BIKE Esihammasratas ROAD MTB Trekking Keskjooks S
 DM-FC Edasimüüja juhend ROAD MTB Trekking City Touring/ Comfort Bike URBAN SPORT E-BIKE Esihammasratas ROAD MTB Trekking Keskjooks S") (Estonian) DM-FC0002-12 Edasimüüja juhend ROAD MTB Trekking City Touring/ Comfort Bike URBAN SPORT E-BIKE Esihammasratas ROAD MTB Trekking Keskjooks SORA FC-3503 FC-3550 Claris FC-2403 FC-2450 Sarjadesse
(Estonian) DM-FC0002-12 Edasimüüja juhend ROAD MTB Trekking City Touring/ Comfort Bike URBAN SPORT E-BIKE Esihammasratas ROAD MTB Trekking Keskjooks SORA FC-3503 FC-3550 Claris FC-2403 FC-2450 Sarjadesse
6 tsooniga keskus WFHC MASTER RF 868MHz & 4 või 6 tsooniga alaseade SLAVE RF KASUTUSJUHEND 6 tsooniga WFHC RF keskus & 4 või 6 tsooniga alaseade SLAVE
 6 tsooniga keskus WFHC MASTER RF 868MHz & 4 või 6 tsooniga alaseade SLAVE RF KASUTUSJUHEND 6 tsooniga WFHC RF keskus & 4 või 6 tsooniga alaseade SLAVE RF 868MHz 3-6 EE 1. KASUTUSJUHEND 6 tsooniga WFHC
6 tsooniga keskus WFHC MASTER RF 868MHz & 4 või 6 tsooniga alaseade SLAVE RF KASUTUSJUHEND 6 tsooniga WFHC RF keskus & 4 või 6 tsooniga alaseade SLAVE RF 868MHz 3-6 EE 1. KASUTUSJUHEND 6 tsooniga WFHC
B120_10 estonian.cdr
 Alati seal, et teid aidata Registreerige oma toode ja otsige abi koduleheküljelt www.philips.com/welcome B120 Beebimonitor Küsimus? Kontakteeruge Philipsiga Eestikeelne kasutusjuhend 2 Valgussensor USB
Alati seal, et teid aidata Registreerige oma toode ja otsige abi koduleheküljelt www.philips.com/welcome B120 Beebimonitor Küsimus? Kontakteeruge Philipsiga Eestikeelne kasutusjuhend 2 Valgussensor USB
P9_10 estonian.cdr
 Registreerige oma toode ja saage abi kodulehelt www.philips.com/welcome P9/10 Eestikeelne kasutusjuhend 2 Ühendage P9 kõlar Bluetooth ühenduse kaudu oma Bluetooth seadmega, nagu näiteks ipadiga, iphone'iga,
Registreerige oma toode ja saage abi kodulehelt www.philips.com/welcome P9/10 Eestikeelne kasutusjuhend 2 Ühendage P9 kõlar Bluetooth ühenduse kaudu oma Bluetooth seadmega, nagu näiteks ipadiga, iphone'iga,
Manuals Generator
 Sooritage asendamine järgnevas järjekorras: 1 Vahetage vedrud paarikaupa. Pingutage seisupiduri hooba. 2 3 Asetage tõkiskingad tagumiste rataste taha. Lõdvendage ratta kinnituspolte. 4 5 Tõstke esimest
Sooritage asendamine järgnevas järjekorras: 1 Vahetage vedrud paarikaupa. Pingutage seisupiduri hooba. 2 3 Asetage tõkiskingad tagumiste rataste taha. Lõdvendage ratta kinnituspolte. 4 5 Tõstke esimest
HCB_hinnakiri2018_kodukale
 Betooni baashinnakiri Hinnakiri kehtib alates 01.01.2018 Töödeldavus S3 Töödeldavus S4 / m 3 /m 3 km-ga / m 3 /m 3 km-ga C 8/10 73 87 75 89 C 12/15 77 92 79 94 C 16/20 79 94 81 96 C 20/25 82 98 84 100
Betooni baashinnakiri Hinnakiri kehtib alates 01.01.2018 Töödeldavus S3 Töödeldavus S4 / m 3 /m 3 km-ga / m 3 /m 3 km-ga C 8/10 73 87 75 89 C 12/15 77 92 79 94 C 16/20 79 94 81 96 C 20/25 82 98 84 100
Microsoft Word - QOS_2008_Tallinn_OK.doc
 GSM mobiiltelefoniteenuse kvaliteet Tallinnas, juuni 2008 Sideteenuste osakond 2008 Kvaliteedist üldiselt GSM mobiiltelefonivõrgus saab mõõta kümneid erinevaid tehnilisi parameetreid ja nende kaudu võrku
GSM mobiiltelefoniteenuse kvaliteet Tallinnas, juuni 2008 Sideteenuste osakond 2008 Kvaliteedist üldiselt GSM mobiiltelefonivõrgus saab mõõta kümneid erinevaid tehnilisi parameetreid ja nende kaudu võrku
SINU UKS DIGITAALSESSE MAAILMA Ruuter Zyxel LTE3302 JUHEND INTERNETI ÜHENDAMISEKS
 SINU UKS DIGITAALSESSE MAAILMA Ruuter Zyxel LTE3302 JUHEND INTERNETI ÜHENDAMISEKS OLULINE TEAVE: LOE ENNE RUUTERI ÜHENDAMIST! Ruuter on sinu uks digitaalsesse maailma. Siit saavad alguse kõik Telia teenused
SINU UKS DIGITAALSESSE MAAILMA Ruuter Zyxel LTE3302 JUHEND INTERNETI ÜHENDAMISEKS OLULINE TEAVE: LOE ENNE RUUTERI ÜHENDAMIST! Ruuter on sinu uks digitaalsesse maailma. Siit saavad alguse kõik Telia teenused
Kiekim mees kirjeldus.docx
 KULLAKERA KANDJAD XII noorte tantsupeo ühitants Tantsu on loonud Margus Toomla ja Karmen Ong 2016. aasta detsembris 2017. aasta noorte tantsupeoks MINA JÄÄN, kirjeldanud Margus Toomla. Muusika ja sõnad
KULLAKERA KANDJAD XII noorte tantsupeo ühitants Tantsu on loonud Margus Toomla ja Karmen Ong 2016. aasta detsembris 2017. aasta noorte tantsupeoks MINA JÄÄN, kirjeldanud Margus Toomla. Muusika ja sõnad
Ecophon Hygiene Meditec A C1 Ecophon Hygiene Meditec A C1 on helineelav ripplaesüsteem kohtadesse, kus regulaarne desinfektsioon ja/või puhastamine on
 Ecophon Hygiene Meditec A C1 Ecophon Hygiene Meditec A C1 on helineelav ripplaesüsteem kohtadesse, kus regulaarne desinfektsioon ja/või puhastamine on vajalik. Sobib kuiva keskkonda. Kasutuskoha näited:
Ecophon Hygiene Meditec A C1 Ecophon Hygiene Meditec A C1 on helineelav ripplaesüsteem kohtadesse, kus regulaarne desinfektsioon ja/või puhastamine on vajalik. Sobib kuiva keskkonda. Kasutuskoha näited:
FIDE reitingumäärus 1. juuli 2014 Kuremaa, Marek Kolk
 FIDE reitingumäärus 1. juuli 2014 Kuremaa, 2014. Marek Kolk Artikkel 0. Sissejuhatus Artikkel 0.2 (uus) Millal läheb partii FIDE reitinguarvestusse? Reitinguarvestusse minev turniir tuleb ette registreerida
FIDE reitingumäärus 1. juuli 2014 Kuremaa, 2014. Marek Kolk Artikkel 0. Sissejuhatus Artikkel 0.2 (uus) Millal läheb partii FIDE reitinguarvestusse? Reitinguarvestusse minev turniir tuleb ette registreerida
BIOPUHASTI M-BOŠ BOX KASUTUS- JA PAIGALDUSJUHEND 2017
 BIOPUHASTI M-BOŠ BOX KASUTUS- JA PAIGALDUSJUHEND 2017 Biopuhasti tööprotsessi kirjeldus M-Bos biopuhastit kasutatakse puhastamaks reovett eramajades, koolides, hotellides ja teistes reovee puhastamist
BIOPUHASTI M-BOŠ BOX KASUTUS- JA PAIGALDUSJUHEND 2017 Biopuhasti tööprotsessi kirjeldus M-Bos biopuhastit kasutatakse puhastamaks reovett eramajades, koolides, hotellides ja teistes reovee puhastamist
(Microsoft Word - Matsalu Veev\344rk AS aktsion\344ride leping \(Lisa D\) Valemid )
 Valemid )") 1(6) 1. Vee- ja kanalisatsiooniteenuse hinna kujundamise põhimõtted Aktsiaselts tegevuskulude arvestuse aluseks on auditeeritud ja kinnitatud aastaaruanne. Hinnakujunduse analüüsis kasutatakse Aktsiaseltsi
1(6) 1. Vee- ja kanalisatsiooniteenuse hinna kujundamise põhimõtted Aktsiaselts tegevuskulude arvestuse aluseks on auditeeritud ja kinnitatud aastaaruanne. Hinnakujunduse analüüsis kasutatakse Aktsiaseltsi
ArcGIS Online Konto loomine Veebikaardi loomine Rakenduste tegemine - esitlus
 PILVI TAUER Tallinna Tehnikagümnaasium ArcGIS Online 1.Konto loomine 2.Veebikaardi loomine 3.Rakenduste tegemine - esitlus Avaliku konto loomine Ava ArcGIS Online keskkond http://www.arcgis.com/ ning logi
PILVI TAUER Tallinna Tehnikagümnaasium ArcGIS Online 1.Konto loomine 2.Veebikaardi loomine 3.Rakenduste tegemine - esitlus Avaliku konto loomine Ava ArcGIS Online keskkond http://www.arcgis.com/ ning logi
Slide 1
 ERAÜ XVII TALVEPÄEV 2015 Uue põlvkonna LDMOS transistorvõimendid 14.veebruar 2015 Mart Tagasaar, ES2NJ Sissejuhatus Alates 2010.aastast on turule ilmunud uue põlvkonna LDMOS transistorid võimsusega 600-1400W,
ERAÜ XVII TALVEPÄEV 2015 Uue põlvkonna LDMOS transistorvõimendid 14.veebruar 2015 Mart Tagasaar, ES2NJ Sissejuhatus Alates 2010.aastast on turule ilmunud uue põlvkonna LDMOS transistorid võimsusega 600-1400W,
Tartu Kutsehariduskeskus IKT osakond Merlis Karja-Kännaste ASUTUSE DOKUMENDIREGISTRI AVALIK VAADE Analüüs Juhendaja Mirjam-Merike Sõmer Tartu 2015
 Tartu Kutsehariduskeskus IKT osakond Merlis Karja-Kännaste ASUTUSE DOKUMENDIREGISTRI AVALIK VAADE Analüüs Juhendaja Mirjam-Merike Sõmer Tartu 2015 SISUKORD SISSEJUHATUS... 3 1. VILJANDI LINNAVALITSUSE
Tartu Kutsehariduskeskus IKT osakond Merlis Karja-Kännaste ASUTUSE DOKUMENDIREGISTRI AVALIK VAADE Analüüs Juhendaja Mirjam-Merike Sõmer Tartu 2015 SISUKORD SISSEJUHATUS... 3 1. VILJANDI LINNAVALITSUSE
Ecophon Master Rigid A Sobib klassiruumi ja kohtadesse, kus hea akustika ja kõnest arusaadavus on esmatähtsad ning avatavus vajalik. Ecophon Master Ri
 Ecophon Master Rigid A Sobib klassiruumi ja kohtadesse, kus hea akustika ja kõnest arusaadavus on esmatähtsad ning avatavus vajalik. Ecophon Master Rigid A on nähtava liistusüsteemiga. Plaadid kinnitatakse
Ecophon Master Rigid A Sobib klassiruumi ja kohtadesse, kus hea akustika ja kõnest arusaadavus on esmatähtsad ning avatavus vajalik. Ecophon Master Rigid A on nähtava liistusüsteemiga. Plaadid kinnitatakse
Test_Pub
 Esirinnas: InnoTech Atira sahtlisüsteem Kiirelt põhiargumendid InnoTech Atira: esirinnas InnoTech Atira on sahtlisüsteem individualistidele. Selle puhtad defineeritud kontuurid loovad karismaatilise disaini
Esirinnas: InnoTech Atira sahtlisüsteem Kiirelt põhiargumendid InnoTech Atira: esirinnas InnoTech Atira on sahtlisüsteem individualistidele. Selle puhtad defineeritud kontuurid loovad karismaatilise disaini
(Microsoft PowerPoint - seminar_6_n\365uded-ainemudel tagasiside.ppt [Compatibility Mode])
![(Microsoft PowerPoint - seminar_6_n\365uded-ainemudel tagasiside.ppt [Compatibility Mode])](/thumbs/98/138957636.jpg "(Microsoft PowerPoint - seminar_6_n\365uded-ainemudel tagasiside.ppt [Compatibility Mode])") Tarkvara projekt seminar VI Eelmise iteratsiooni tagasivaade, testimine, installatsioonijuhend, järgmise iteratsiooni näited. Karel Kravik Administratiivset:protestid Probleem: protestide hulk ja kvaliteet
Tarkvara projekt seminar VI Eelmise iteratsiooni tagasivaade, testimine, installatsioonijuhend, järgmise iteratsiooni näited. Karel Kravik Administratiivset:protestid Probleem: protestide hulk ja kvaliteet
Ülesanne #5: Käik objektile Kooli ümberkujundamist vajava koha analüüs. Ülesanne #5 juhatab sisse teise poole ülesandeid, mille käigus loovad õpilased
 Ülesanne #5: Käik objektile Kooli ümberkujundamist vajava koha analüüs. Ülesanne #5 juhatab sisse teise poole ülesandeid, mille käigus loovad õpilased oma kujunduse ühele kohale koolis. 5.1 Kohavalik Tiimi
Ülesanne #5: Käik objektile Kooli ümberkujundamist vajava koha analüüs. Ülesanne #5 juhatab sisse teise poole ülesandeid, mille käigus loovad õpilased oma kujunduse ühele kohale koolis. 5.1 Kohavalik Tiimi
Microsoft Word - DB2_TECEfloor Raumthermostat Analog_EN_est
 1 TECEfloori toatermostaat Analog (RT-A ja RT-A HK) TECEfloori toatermostaat Analog on kvaliteetne toatermostaat ruumi temperatuuri registreerimiseks ja muuutmiseks ning pakub maksimaalset kasutusmugavust.
1 TECEfloori toatermostaat Analog (RT-A ja RT-A HK) TECEfloori toatermostaat Analog on kvaliteetne toatermostaat ruumi temperatuuri registreerimiseks ja muuutmiseks ning pakub maksimaalset kasutusmugavust.
Page 1 of 6 Otsid teistmoodi eluviisi? Kommuun - uued energiasäästlikud ridaelamud Tabasalu parkmetsas! Kuigi Tallinn ja Harjumaa on uusarenduste ülek
 Page 1 of 6 Otsid teistmoodi eluviisi? Kommuun - uued energiasäästlikud ridaelamud Tabasalu parkmetsas! Kuigi Tallinn ja Harjumaa on uusarenduste ülekülluses, ei ole Te leidnud veel seda OMA KODU! Meil
Page 1 of 6 Otsid teistmoodi eluviisi? Kommuun - uued energiasäästlikud ridaelamud Tabasalu parkmetsas! Kuigi Tallinn ja Harjumaa on uusarenduste ülekülluses, ei ole Te leidnud veel seda OMA KODU! Meil
Sularahateenuse hinnastamise põhimõtted SRK 3 12_
 Koostas: E. Vinni (sularahateenuste müügijuht) Kinnitas: P. Sarapuu (juhatuse esimees) Vers.: 2 Lk: 1/7 Sularahateenuse hinnastamise põhimõtted Koostas: E. Vinni (sularahateenuste müügijuht) Kinnitas:
Koostas: E. Vinni (sularahateenuste müügijuht) Kinnitas: P. Sarapuu (juhatuse esimees) Vers.: 2 Lk: 1/7 Sularahateenuse hinnastamise põhimõtted Koostas: E. Vinni (sularahateenuste müügijuht) Kinnitas:
TARTU ORIENTEERUMIS- NELJAPÄEVAKUD neljapäevak Tehvandi, 1. august Ajakava: Start avatud: Finiš suletakse: Asukoht: Võistlu
 TARTU ORIENTEERUMIS- NELJAPÄEVAKUD 2019 16. neljapäevak Tehvandi, 1. august Ajakava: Start avatud: 16.00 19.00 Finiš suletakse: 19.30 Asukoht: Võistluskeskuse, parkimise ja kohalesõidu tähistuse asukohad:
TARTU ORIENTEERUMIS- NELJAPÄEVAKUD 2019 16. neljapäevak Tehvandi, 1. august Ajakava: Start avatud: 16.00 19.00 Finiš suletakse: 19.30 Asukoht: Võistluskeskuse, parkimise ja kohalesõidu tähistuse asukohad:
EFEXON LIUGUKSED 2015 €URO.xls
 Aleco (profiili laius 35mm) Dekoratiiv klaas (13.70 FIANDRA MATT) Deco klaas (0230 deco, vt.kataloogist mõõte!) Deco kujundklaas (Deco16, Deco39) Melamiinpaneel LUX grupp 400600 601800 AS,BG,SG,BW AS,BG,SG,BW
Aleco (profiili laius 35mm) Dekoratiiv klaas (13.70 FIANDRA MATT) Deco klaas (0230 deco, vt.kataloogist mõõte!) Deco kujundklaas (Deco16, Deco39) Melamiinpaneel LUX grupp 400600 601800 AS,BG,SG,BW AS,BG,SG,BW
KAARKASVUHOONE POLÜKARBONAADIGA 3X4M "KERTTU" 2,1m 3,0m min 4m Tehniline pass lk 2-9 Koostejuhend lk 10-31
 KAARKASVUHOONE POLÜKARBONAADIGA 3X4M "KERTTU" 2,1m 3,0m min 4m Tehniline pass lk 2-9 Koostejuhend lk 10-31 TEHNILINE PASS/KASVUHOONE KERTTU! Kasvuhoone KERTTU kokkupanekul ja kasutamisel tuleb rangelt
KAARKASVUHOONE POLÜKARBONAADIGA 3X4M "KERTTU" 2,1m 3,0m min 4m Tehniline pass lk 2-9 Koostejuhend lk 10-31 TEHNILINE PASS/KASVUHOONE KERTTU! Kasvuhoone KERTTU kokkupanekul ja kasutamisel tuleb rangelt
M16 Final Decision_Recalculation of MTR for EMT
 1 OTSUS Tallinn 22.juuni 2007 J.1-45/07/7 Mobiiltelefonivõrgus häälkõne lõpetamise hinnakohustuse kehtestamine AS EMT- le Sideameti 21. märtsi 2006. a otsusega nr J.1-50/06/2 tunnistati AS EMT (edaspidi
1 OTSUS Tallinn 22.juuni 2007 J.1-45/07/7 Mobiiltelefonivõrgus häälkõne lõpetamise hinnakohustuse kehtestamine AS EMT- le Sideameti 21. märtsi 2006. a otsusega nr J.1-50/06/2 tunnistati AS EMT (edaspidi
5/8/ Dacia SANDERO Hinnad ja varustused SANDERO HINNAKIRI
 Hinnad ja varustused SANDERO HINNAKIRI 02.04.2019 VARUSTUSTASE MUDELI KOOD KERE MOOTOR KÜTUS KW/HJ KÄIGUKAST HIND (EUR) ACCESS SA2-AC75GEC Luukpära Sce 75 Bensiin 54/73 manuaal 7 490 AMBIANCE SA2-AM75GEC
Hinnad ja varustused SANDERO HINNAKIRI 02.04.2019 VARUSTUSTASE MUDELI KOOD KERE MOOTOR KÜTUS KW/HJ KÄIGUKAST HIND (EUR) ACCESS SA2-AC75GEC Luukpära Sce 75 Bensiin 54/73 manuaal 7 490 AMBIANCE SA2-AM75GEC
VL1_praks2_2009s
 Biomeetria praks 2 Illustreeritud (mittetäielik) tööjuhend Eeltöö 1. Avage MS Excel is oma kursuse ankeedivastuseid sisaldav andmestik (see, mida 1. praktikumiski analüüsisite), 2. nimetage Sheet3 ümber
Biomeetria praks 2 Illustreeritud (mittetäielik) tööjuhend Eeltöö 1. Avage MS Excel is oma kursuse ankeedivastuseid sisaldav andmestik (see, mida 1. praktikumiski analüüsisite), 2. nimetage Sheet3 ümber
Saksa keele riigieksamit asendavate eksamite tulemuste lühianalüüs Ülevaade saksa keele riigieksamit asendavatest eksamitest Saksa keele riigi
 Saksa keele riigieksamit asendavate eksamite tulemuste lühianalüüs 2014 1. Ülevaade saksa keele riigieksamit asendavatest eksamitest Saksa keele riigieksam on alates 2014. a asendatud Goethe-Zertifikat
Saksa keele riigieksamit asendavate eksamite tulemuste lühianalüüs 2014 1. Ülevaade saksa keele riigieksamit asendavatest eksamitest Saksa keele riigieksam on alates 2014. a asendatud Goethe-Zertifikat
SEPTIKU JA IMBVÄLAJKU KASUTUS-PAIGALDUS JUHEND 2017
 SEPTIKU JA IMBVÄLAJKU KASUTUS-PAIGALDUS JUHEND 2017 Septiku ja imbväljaku tööprotsessi kirjeldus Üldine info ja asukoha valik: Septik on polüetüleenist (PE) rotovalu süsteemiga valmistatud mahuti, milles
SEPTIKU JA IMBVÄLAJKU KASUTUS-PAIGALDUS JUHEND 2017 Septiku ja imbväljaku tööprotsessi kirjeldus Üldine info ja asukoha valik: Septik on polüetüleenist (PE) rotovalu süsteemiga valmistatud mahuti, milles
Programmi AnimatorDV Simple+ lühike kasutajajuhend
 Programmi AnimatorDV Simple+ esmane kasutusjuhend Programm AnimatorDV Simple+ on mõeldud animatsioonide loomiseks. Tegemist on tasuta tarkvaraga, mis töötab videoseadmetega (videokaamera, veebikaamera).
Programmi AnimatorDV Simple+ esmane kasutusjuhend Programm AnimatorDV Simple+ on mõeldud animatsioonide loomiseks. Tegemist on tasuta tarkvaraga, mis töötab videoseadmetega (videokaamera, veebikaamera).
DJI GOGGLES Kiirjuhend V1.0
 DJI GOGGLES Kiirjuhend V1.0 DJI Goggles DJI Goggles on mugavad prillid, mis on disainitud mugavaks FPV lendamiseks DJI toodetega. Nad loovad ultra-kõrge kvaliteediga pildi, minimaalse viivitusega pikamaa
DJI GOGGLES Kiirjuhend V1.0 DJI Goggles DJI Goggles on mugavad prillid, mis on disainitud mugavaks FPV lendamiseks DJI toodetega. Nad loovad ultra-kõrge kvaliteediga pildi, minimaalse viivitusega pikamaa
KAITSELIIDU AASTA MEISTRIVÕISTLUSED SÕJALISES KOLMEVÕISTLUSES Eesmärk: JUHEND populariseerida sõjalis-sportlikku tegevust kaitseliitlastee hulga
 KAITSELIIDU 2019. AASTA MEISTRIVÕISTLUSED SÕJALISES KOLMEVÕISTLUSES Eesmärk: JUHEND populariseerida sõjalis-sportlikku tegevust kaitseliitlastee hulgas. selgitada välja Kaitseliidu 2019. aasta meistrid
KAITSELIIDU 2019. AASTA MEISTRIVÕISTLUSED SÕJALISES KOLMEVÕISTLUSES Eesmärk: JUHEND populariseerida sõjalis-sportlikku tegevust kaitseliitlastee hulgas. selgitada välja Kaitseliidu 2019. aasta meistrid
METALL
 1. Plaadi arvutus 1.1 Koormused plaadile Normkoormused: kasuskoormus: q k =17 kn/m 2 Arvutuskoormused: kasuskoormus: q d =1,5*17=25,5 kn/m 2 1.2 Plaadi arvutrusskeem ja dimensioneermine Abitalade sammuks
1. Plaadi arvutus 1.1 Koormused plaadile Normkoormused: kasuskoormus: q k =17 kn/m 2 Arvutuskoormused: kasuskoormus: q d =1,5*17=25,5 kn/m 2 1.2 Plaadi arvutrusskeem ja dimensioneermine Abitalade sammuks
Pimeda ajal sõitmine
 Sõidueksamitel tehtud vead www.mnt.ee 1 Vasakpöörde sooritamine Sõiduteel paiknemine. Enne vasak- või tagasipööret peab juht aegsasti suunduma sõidutee pärisuunavööndi vasaku ääre lähedale või selle pöörde
Sõidueksamitel tehtud vead www.mnt.ee 1 Vasakpöörde sooritamine Sõiduteel paiknemine. Enne vasak- või tagasipööret peab juht aegsasti suunduma sõidutee pärisuunavööndi vasaku ääre lähedale või selle pöörde