EESTI MAAÜLIKOOL. Rain Plaado MUDELAUTODE DÜNOSTENDI PROJEKT
|
|
|
- Jaan Kasak
- 1 aastad tagasi
- Vaatused:
Väljavõte
1 EESTI MAAÜLIKOOL Tartu Tehnikakolledž Rain Plaado MUDELAUTODE DÜNOSTENDI PROJEKT Model Car Dyno Bench Project Rakenduskõrgharidus lõputöö tehnotroonika erialal Tartu 2014
2 ABSTRACT Plaado R. Model Car Dyno Bench Project. Tartu: EMÜ, pages, 36 figures, 2 tables, format A4. In Estonian. The thesis gives an overview of dyno benches. The author concentrates on model cars and ways of monitoring their output power. Measuring power and torque from wheels gives a good overview of model engine and drivetrain. It also gives a good opportunity for tuning the model to maximum power and torque. The paper describes how to build a real and usable dyno bench for 2 and 4 wheel drive models. This dyno bench is designed and built to be the cheapest in the market. The project covers hardware, electronics, software, technical drawings, and testing. The dyno bench built within this project is fully functional and can be used for testing model cars. Placing and attaching the model is quick and easy. Taking measurements takes only 4-8 seconds. This project also covers possible mechanical, electronic and software development that can be made to improve the usage and adjust the price of this dyno bench. Keywords: Dyno bench, power, torque, model car, radio control. 2
3 SISSEJUHATUS Modellismiga tegelevaid inimesi on Eestis ja välismaal arvukalt. Üheks levinumaks mudelite tüübiks on just erinevad autod seda nende odavama hinna kui ka juhtimise lihtsuse tõttu. Mudelautodele korraldatakse ka korrapäraselt võistlusi mistõttu on autode kiiruse- ja kiirendusomaduste parandamine väga tähtsal kohal. Mootori ja jõuülekande seadistamisel on vaja hinnata ka seadistamise tulemust selleks võib näiteks mõõta mingi vahemaa läbimiseks kulunud aega. Selline hindamine aga pole paraku eriti täpne kuna on keeruline korduvate katsete puhul tagada samasuguseid tingimusi. Tulemus võib sõltuda sõidetavast pinnasest, tuule kiirusest, temperatuurist, õhuniiskusest ja paljudest muudest teguritest. Objektiivseks võimsuse hindamiseks on antud lõputöö käigus valmistatud mudelautode dünostend. Stendi kasutamine on väga lihtne ja kiire, mõõtmisi on võimalik teostada sobiva ventilatsiooni korral isegi siseruumides. Lisaks maksimaalse võimsuse ja pöördemomendi teada saamisele on mõõtmistulemusel näha mudeli võimsuse ja pöördemomendi sõltuvus kiirusest. See annab võimaluse reguleerida ülekannet ja mootorit selliselt, et võistlustel kasutatav kiirusevahemik oleks mootori maksimaalse võimsuse ja pöördemomendi lähedal. Dünostendi on mugav kasutada ka näiteks karburaatori seadistamisel, kus reguleerimised peavad olema väga täpsed ja reguleerida saab väikeste sammude kaupa. Antud stendi kasutades on mõõtmine väga kiire - tulemuse saamine võtab sõltuvalt autost ainult 4 8 sekundit. Mudelautode dünostende on tehtud ka varasemalt, enamasti küll hobi korras ja ainueksemplaridena. Veel hiljuti on olnud sarnastel stendidel vähemalt kaks suuremat tootjat, paraku on mõlemad praeguseks oma tegevuse lõpetanud. Stendi projekteerimise käigus on vähesel määral eeskuju võetud sõiduautodele mõeldud dünodelt. Kogu raam, korpus, elektroonika ja tarkvara on töö autori poolt projekteeritud ja valmistatud, teenusena on lastud välja lõigata ainult pöörete lugemisel kasutatav ketas. Stendi valmistamisel on lähtutud sellest, et lõpptulemus oleks kasutajale võimalikult lihtne kasutada, odav valmistada ja omaks vajalikku funktsionaalsust. Valmis lahenduse puhul on täidetud kõik algselt seatud eesmärgid ja stendi on erinevate mudelitega testitud. Antud seadet ei saa lugeda lõplikult valminuks kuna stendi puhul on plaanis läbi viia veel mõned täiendused, mis muudaksid mõõtmise veelgi täpsemaks. 3
4 Antud töö esimeses peatükis on toodud ära ülevaade sõiduautodel ja modellisminduses kasutatavatest dünostendidest ja nende jagunemisest. Teises peatükis kirjeldatakse mudelautosid, nende jagunemist vastavalt suurusele ja kasutatavale kohale ja mudelautodel kasutatavaid mootoreid. Kolmanda peatüki sisuks on piirangud ja nõuded, millest on lähtutud antud stendi projekteerimisel ja valmistamisel. Neljas peatükk sisaldab infot dünostendi ehituse kohata. Täpsemalt on kirjeldatud seal kinemaatikat, mehaanikat, elektroonikat ja tarkvara. Viienda peatüki sisuks on lõplik lahendus, kus on ära näidatud stendi koost, maksumus, katsed ja mõõtmistulemused, lühike kasutusjuhend ning stendi võimalik edasine arendus. Lisas A on näidatud visuaalprogrammeerimise keskkonnas tehtud programm ja lisas B arendusplaadi jaoks kirjutatud programm. 4
5 SISUKORD SISSEJUHATUS DÜNOSTENDIDE ÜLEVAADE Sõiduautode dünostendid Modellismis kasutatavad dünostendid MUDELAUTOD Ülevaade mudelautodest PIIRANGUD JA NÕUDED Nõuded Piirangud DÜNOSTENDI EHITUS Teoreetiline osa Mehaanika Elektroonika Tarkvara LÕPLIK LAHENDUS Koost Maksumus Katsed ja mõõtmistulemused Kasutusjuhend Stendi võimalik edasiarendus Mootori pöörete lugemine Temperatuuri, õhurõhu ja niiskuse mõõtmine Heitgaaside mõõtmine Mootori võimsuse mõõtmine Tarkvara täiustamine KOKKUVÕTE KIRJANDUS LISAD

6 1. DÜNOSTENDIDE ÜLEVAADE 1.1. Sõiduautode dünostendid Sisepõlemismootorite võimsuse hindamise vajadus tekkis sisuliselt koos mootorite endi välja töötamisega. Üks esimesi sellel alal tegutsejaid oli William Froude, kes mõtles välja vesipiduri. Vesipiduri loomise põhjuseks oli vajadus seadme järgi, mis suudaks suurte laeva mootorite võimsust mõõta. Seade loodi algselt Briti Admiraliteedi tellimusena. [1] Võimsuse mõõtmiseks on võimalik kasutada erinevaid lahendusi ja vastavalt jagunevad ka selleks kasutatavad seadmed (joonis 1.1). Joonis 1.1. Dünostendide jaotus Dünostendide erinevused seisnevad nii nende ehituses, mõõtmisvõimalustes ja täpsuses. Dünostende kasutatakse peale autode ka mootorrataste, mootorsaanide, paatide, laevade, lennukite ja kõikvõimalike muude masinate võimuse mõõtmiseks [2]. Antud töös on tähelepanu pööratud enamasti sõiduautodel kasutatavatele dünodele. Mootoridüno (engine dyno) võimaldab mõõta otse mootori võimsust. Mootor kinnitatakse stendile ja ühendatakse kardaaniga kas käigukasti väljundvõlli või hoorattaga. Mootoridüno eeliseks on võimalus mõõta mootori võimsust ilma ülekande kadudeta. Antud dünostendidel kasutatakse mõõtmiseks kahte levinumat lahendust. Esimesel juhul kiirendatakse teadaoleva inertsimomendiga hooratast, mille kiirendusest on võimalik välja 6

7 arvutada pöördemoment ja võimsus (joonis 1.2). Sellise lahenduse eeliseks on konstruktsiooni lihtsus ja valmistamise odavam hind. [3] Joonis 1.2. Dünopink mootori võimsuse mõõtmiseks kasutades hooratast [4] Ülal toodud stendi puuduseks on see, et ei ole võimalik mootorit seadistamise ajal soovitud pöörete juures koormuse all hoida. Mõõtmine toimub tühikäigu pöörete juures kiirendama hakkamisest kuni soovitud maksimaalsete pööreteni. Suuremaid võimalusi mõõtmiseks pakub mootoridüno, kus mootorile rakendatakse kontrollitav koormus ja selle abil arvutatakse välja mootori võimsus. Kardaani pidurdamiseks on kasutusel mitmeid erinevaid lahendusi. Kõige vanem tüüp neist on prantsuse inseneri Gaspard Prony poolt aastal leiutatud hõõrdepidur (joonis 1.3). Mootori jõu teada saamiseks suurendatakse hõõrdetakistust võlli ja piduri vahel sujuvalt kuniks mootori pöörded hakkavad langema. Sellel hetkel mõõdetakse ära pidurile mõjuv jõud ja arvutatakse välja pöördemoment. Tegemist on tehniliselt lihtsa lahendusega kuid negatiivse poole pealt võib välja tuua selle, et pikemate mõõtmiste puhul eraldub pidurdamisel palju kuumust ja võlli pidurdav friktsioonketas või klots kulub. [5] 7
![Joonis 1.3. Lamerihmaga käitatav hõõrdepidurdusega stend võimsuse mõõtmiseks [6] Tänapäeval leidub mootori pidurdamiseks märksa kaasaegsemaid lahendusi, nendest üheks on vesipidur.](/docs-images/118/229181366/images/8-0.jpg "Vesipiduri tööpõhimõte seisneb selles, et suletud korpuses asub pesade või labadega rootor ja staator (joonis 1.4).")
8 Joonis 1.3. Lamerihmaga käitatav hõõrdepidurdusega stend võimsuse mõõtmiseks [6] Tänapäeval leidub mootori pidurdamiseks märksa kaasaegsemaid lahendusi, nendest üheks on vesipidur. Vesipiduri tööpõhimõte seisneb selles, et suletud korpuses asub pesade või labadega rootor ja staator (joonis 1.4). Rootor on ühendatud testitava mootoriga ja staatori külge on ühendatud seade, millega on võimalik kindlaks teha staatorile mõjuvat jõudu. Kuna staator ja rootor on paigutatud teineteisele väga lähedale siis suletud korpusesse vett lastes hakkab staator rootorit pidurdama. Mida suurem kogus vett on korpuses seda raskem on rootoril pöörelda ja seda suuremat jõudu avaldab ta staatorile. [7] 8

.")
9 Joonis 1.4. Dünostendides kasutatav vesipidur [7] Lisaks vesipidurile on kasutusel ka elektromagnet pidurdus, kus rauast piduriketast ümbritsevad mähised (joonis 1.5). Elektrivoolu toimel indutseeritakse neis magnetväli, mis mõjub kettale pidurina. [8] Joonis 1.5. Elektromagnet pidurdus [9] 9

10 Lisaks kõigile eelpool mainitud lahendustele mootori pidurdamiseks leidub erinevaid lahendusi veelgi. Nendeks on näiteks koormuse tekitamiseks mootori külge ühendatud alalis- ja vahelduvvoolu mootorid, magnetilise pulbri kasutamine piduris jne. Mootori dünostendid võimaldavad mõõta otsest mootori võimsust ilma, et peaks võtma arvesse ülekandekadusid käigukastides või veosildades. Enamikel juhtudest tähendab see siiski vajadust eemaldada mootor ülejäänud masinast. See muudab aga mõõtmise autode puhul ajakulukaks ja paljudel juhtudel ebaotstarbekalt ja kalliks. Selleks, et oleks võimalik hinnata sõiduki võimsust kiiremini ja mugavamalt on kasutusel keredünod (chassis dyno). Keredüno kõige suurem erinevus mootoridünost on see, et võimsust mõõdetakse otse ratastest. Tavaliselt on selleks kasutusel rullid, kuhu peale sõiduk ratastega paigutatakse ja kinnitatakse (joonis 1.6). Joonis 1.6. Sõiduki paigutus keredüno rullikutel[10] Teiseks alternatiiviks on kinnitada seadmed võimsuse mõõtmiseks otse rataste asemele (joonis 1.7). 10
![Joonis 1.7. Alternatiivne lahendus võimsuse mõõtmiseks [11] Kuna keredüno puhul mõõdetakse võimsust rattast siis pole mõõdistamiseks vajalik teha mingeid spetsiaalseid ettevalmistusi.](/docs-images/118/229181366/images/11-0.jpg "Piisab vaid sõiduki kinnitamisest seadmele.")
11 Joonis 1.7. Alternatiivne lahendus võimsuse mõõtmiseks [11] Kuna keredüno puhul mõõdetakse võimsust rattast siis pole mõõdistamiseks vajalik teha mingeid spetsiaalseid ettevalmistusi. Piisab vaid sõiduki kinnitamisest seadmele. Keredüno puhul võib nimetada saadud mõõtetulemust rohkem reaalsust kajastavamaks kuna tulemusest on lahutatud juba ülekandekaod mis on olemas ka autoga mööda teed sõites. Sõiduautode puhul on enamasti kõige väiksema ülekandekaoga esiveolised autod, kus kadu jääb 10-15% vahele. Nelikveolistel sõiduautodel võib see ulatuda isegi kuni 25% -ni sõltuvalt ülekande- ja veosüsteemist. [12] Keredünode jagunemine on identne mootoridünodega kasutatakse nii inertsiga kui ka eraldi piduritega dünostende. Nagu ka mootoridünode puhul on mootorite seadistamine lihtsam just pidurdust omavate stendidega. Pidurdust kasutades on võimalik hoida mootoril koormust sobivate pöörete juures, mis lihtsustab mootori häälestamist. Pidurdussüsteemid dünostendidel lubavad teostada täpsemaid mõõdistusi ja seadistusi kuid on ka väga kallid. Kuna erinevad pidurisüsteemid vajavad töötamiseks näiteks sundjahutust, vee või mõne muu vedeliku olemasolu, täiendavat elektrienergiat ja rohkem kuluvaid komponente siis on nad tehniliselt lihtsamatest inertsil toimivatest dünodest ka märgatavalt kallimad. 11

12 1.2. Modellismis kasutatavad dünostendid Samamoodi nagu sõiduautodel on erinevad dünostendid kasutusel ka modellismis. Mudelitel kasutatavate seadmete kohta on infot väga vähe ja suuremaid tootjaid on vaid üksikud. Rohkem kasutatavad on inertsiga mootori ja keredünod ilmselt ehituse lihtsuse pärast. Antud töös nende kohta käiv informatsioon on leitud pigem hobi korras ehitajatelt kui tõsistelt tootjatelt. Alljärgnevalt on välja toodud mõned internetist leitud stendid ja olemasolu korral ka nende täpsem kirjeldus. Kõige lihtsamad leitud stendid on ehitatud väga käepärastest vahenditest tavaliselt on rullideks kasutusel PVC torud ja anduriks näiteks kõlar, milles tekitatakse signaal võlli küljes oleva magnetiga. Korpus on enamasti valmistatud vineerist või plastikust. Paljud stendid on siiski ehitatud korralike rulle kasutades tugevale raamile. Alloleval joonisel 1.8 on näha plastikust torudest rulle kasutav dünostend, mis kasutab rulli kiiruse määramiseks ühte magnetit ja keelreleed. Joonis 1.8. Lihtsa lahendusega mudelidüno [13] 12

13 RCdynosystems poolt valmistatud dünostend (joonis 1.9) on professionaalse väljanägemisega kuid kahjuks täpsemat infot selle kohta pole ettevõtte koduleht on suletud. Sama lugu on ka mudelite dünostendide valmistajaga Dyno46, kes tootis väga korraliku tarkvara ja riistvaraga stende [14]. Joonis 1.9. RCdynosystemi poolt valmistatud stend [15] Mootoridünode kohta on olemas rohkem informatsiooni ilmselt selle tõttu, et neid on võimalik kasutada lisaks autodele ka lennukitel ja paatidel. Alljärgneval joonisel 1.10 on näidatud mootoridüno, mis on valmistatud ettevõtte Contrast poolt ja mis sobib kuupsentimeetrise töömahuga sisepõlemismootorite võimsuse mõõtmiseks. [16] 13
![Joonis 1.10. Sisepõlemismootori võimsuse mõõtmise stend [16] Joonisel 1.](/docs-images/118/229181366/images/14-0.jpg "11 on näha käepärastest vahenditest ehitatud mootori dünostend, kahjuks täpsem informatsioon ehituse")

14 Joonis Sisepõlemismootori võimsuse mõõtmise stend [16] Joonisel 1.11 on näha käepärastest vahenditest ehitatud mootori dünostend, kahjuks täpsem informatsioon ehituse kohta puudub. Joonis Käepärastest vahenditest valmistatud stend [17] Pilte kodustes tingimustes valmistatud dünostendidest leidub väga palju aga kahjuks enamasti puudub igasugune lisainformatsioon nende töövõime ja täpsuse kohta. 14
15 2. MUDELAUTOD 2.1. Ülevaade mudelautodest Antud töös käsitletud mudelautode võimsuse mõõtmiseks valmistatud stend on mõeldud 1/16 1/5 mõõtkavas mudelitele. Näiteks mudel mõõtkavas 1/5 on reaalsest sõidukist tehtud koopia, mis on mõõtmetelt ligikaudu 5 korda väiksem. Stendi puhul ei ole välistatud, et seda pole võimalik kasutada teatud 1/5 mõõtkavas mudeliga. Antud projektis on ette nähtud mudeli maksimaalseks laiuseks 500 mm ja maksimaalseks teljevaheks 650mm. Väga suurte masinate 1/5 koopiad võivad neid mõõte ületada. 1/5 mudelite keskmine teljelaius jääb 350 ja 450 mm vahele. Mudelautod jagunevad kahte suuremasse klassi esiteks on road ehk masinad, mis on üldiselt mõeldud sõitma kõvakattega pinnasel, olgu selleks siis asfalt või betoon. Teiseks klassiks on off road ehk mudelid, mis on mõeldud sõitmiseks kõikjal, kus sõita on võimalik. Mootori tüübist lähtuvalt on neil kolm klassi. Esiteks on järjest populaarsemaks muutuvad elektrimootoriga mudelid, mis kasutavad enamasti harjadeta mootorit (brushless). Elektrimootoritega mudeleid (joonis 2.1) tehakse kõikides mõõtkavades ja need on ka kõige laialdasemalt levinud. Teiseks klassiks on sisepõlemismootorid, mis kasutavad kütuseks metanooli, nitrometaani ja õli segu (nitro) (joonis 2.2) [18]. Tegemist on väga võimsate ja kiirete mudelitega. Neid mootoreid paigaldatakse samuti kõikides mõõtkavades mudelitele. Kolmandaks klassiks on bensiinitoitega kahetaktilised sisepõlemismootorid, mida tihtipeale nimetatakse trimmeriteks (joonis 2.3). Kuna tegemist on suuremate ja raskemate mootoritega siis neid paigaldatakse põhiliselt mudelitele mõõtkavas 1/5. [19] 15

![mõõtkavas mudel [20] Joonis](/docs-images/118/229181366/images/16-1.jpg "2.2. Nitromootoriga 1/16")
16 Joonis 2.1. Elektrimootoriga 1/16 mõõtkavas mudel [20] Joonis 2.2. Nitromootoriga 1/16 mõõtkavas mudel [21] 16

17 Joonis /5 mõõtkavas bensiinimootoriga mudel [22] Kuna mudeleid on väga erineva suurusega erinevas mõõtkavas siis oleks sellise dünostendi valmistamine, mis sobiks kõigile, väga keerukas. Sellest lähtuvalt sai valitud vahemik mudelite mõõtmetele, mida on võimalik stendis mõõta. 17
18 3. PIIRANGUD JA NÕUDED 3.1. Nõuded Töös kirjeldatud dünostend on mõeldud kasutamiseks eelkõige erinevat kütust kasutatavate sisepõlemismootoritega. Piirangute ja nõuete koostamisel on lähtutud sellest, et dünostendi kasutatakse ainult sihtotstarbeliselt, jälgitakse kõiki ohutusnõudeid ja mõõtmised teostatakse töös antud juhiste järgi. Dünostendiga saab mõõta võimsust ja pöördemomenti ühe- ja kahesillaveolistel mudelitel; Mõõtmisi saab teostada autodega mõõtkavas 1/ /5; Mõõtmise tulemus kuvatakse reaalajas graafikuna, kus on näidatud võimsuse ja pöördemomendi sõltuvus kiirusest või kiirendatavate rullikute pööretest; Vähim mõõdetav võimsus on 5 W, suurim mõõdetav võimsus on 3000 W; Rulliku maksimaalne joonkiirus on vähemalt 35 m/s ; Tarkvara on lihtsasti seadistatav vastavalt veosildade arvule ja graafikul kuvatavatele näitajatele; Tarkvara on võimalik kasutada levinumate Windowsi operatsioonisüsteemidega; Tarkvara on võimeline väljastama mõõdetud andmed tabeltöötlus tarkvarale; Rullikute vahelise kauguse muutmine ja autode kinnitamine stendile ei nõua tööriistu; Stendi liikuvaid osi peab olema võimalik vahetada; Seade ühendub arvutiga läbi USB liidese. 18
19 3.2. Piirangud Dünostend ei kujuta mõõtmiste käigus ohtu operaatorile ega ümbritsevale keskkonnale; Tarkvara paigaldamine, seadistamine ja kasutamine on lihtne ja arusaadav; Stend ei kahjusta mõõdetavat mudelit; Stendi korpus on piisav, et tagada ohutus rulliku purunemise korral või võõrkeha sattumise korral rulliku vahele; Stendi kaal ei ületa 70 kg; Stendis kasutatavate komponentide hind ei ületa
20 4. DÜNOSTENDI EHITUS 4.1. Teoreetiline osa Joonisel 4.1 on kujutatud dünostendi kinemaatika. Joonis 4.1. Stendi kinemaatika Ratta nurkkiirus, (4.1) kus - joonkiirus m/s; - rattaraadius m. Ratta nurkkiirendus, (4.2) kus tangentsiaalkiirendus m/s 2. 20
21 Vastavalt valemitele (4.1) ja (4.2) ning joonisele 4.1 on rulli nurkkiiruseks ja kiirenduseks:, (4.3) Rulli inertsimoment avaldub järgnevalt. (4.4), (4.5) kus r rulli raadius m; m mass kg,. Valemis (4.5) mass on leitud ruumala ja tiheduse korrutisena ( ), kus ja. Rullide projekteerimisest ja mõõtmete valikus antakse täpsem ülevaade jaotises 4.2. Rulli pöördemoment on võrdne. (4.6) Valemi (4.6) abil leitakse võimsus. (4.7) Valemeid (4.6) ja (4.7) kasutatakse programmeerimisel, mille abil leitakse sõiduki pöördemoment ja võimsus Mehaanika Dünostendi konstrueerimisel on väga tähtsal kohal kiirendatavad rullikud. Rullikud peavad olema piisavalt tugevusvaruga, et välistada läbipaine või murdumine kogu kiirenduse vältel. Samuti peavad rullikud olema täpselt tasakaalus vältimaks suurtel pööretel 21
22 vibratsiooni ja resonantsi teket, mis võiks kahjustada stendi või mõõdetavat mudelit. Rulliku mõõtmetest ja materjalist sõltub rulliku inertsimoment, mida on vaja teada võimalikult täpselt pöördemomendi arvutuse juures. Sobiva inertsimomendiga rulliku valmistamine on tähtis kahel põhjusel inertsimoment peab olema piisavalt suur, et lõppkiiruseni kiirendamise käigus saaks mõõta piisaval hulgal punkte. See annab võimaluse salvestada rohkem punkte graafikule ja tulemuseks on sujuvam ja suurema resolutsiooniga graafik. Samas ei saa inertsimoment olla liiga suur kuna sellisel juhul tekitatakse kiirendamisel mudeli mootorile, juhtelektroonikale ja jõuülekandele reaalsest kiirendamisest suuresti erinev koormus. Rulliku pikkus on valitud selliselt, et rullikule mahuks enamlevinud 1/5 mõõtkavas mudelid. Diameetri valikul oli esialgne soov kasutada 102 mm diameetriga rulle, et saavutada parem kontakt mudeli ratta ja rulliku vahel. Suurema diameetri eeliseks on ka see, et piisava inertsimomendi saavutamiseks pole vaja kasutada täismaterjalist rulli. Suurema diameetriga paksuseinalise toru kasutamine võimaldab suurendada kontaktpinda rulliku ja ratta vahel, saavutada suurem inertsimoment ja väiksem rulliku mass. Paksuseinalisest torust rullikute valmistamisel on ka mõned negatiivsed küljed. Esiteks on vajadus toru ühendada otstest võlliga, kuhu peale saab paigaldada laagrid see tähendab suuremat aja ja materjali kulu valmistamisel. Teiseks probleemiks on sobiva paksuseinalise toru halb saadavus ja kõrge hind. Esialgse rulliku (joonis 4.2) valmistamiseks kasutati 102 mm välisdiameetri ja 4 mm paksuse seinaga toru. Peale otsakorkide valmistamist ja paigaldamist selgus treipingis, et 500 mm toru viskumine on 1-2 mm toru keskel. Välispinna üle treimisega oleks olnud võimalus küll lahti saada viskumisest kuid sellisel juhul oleks jäänud toru seinapaksus erinevus kuni 2 mm. Tagajärjeks oleks tasakaalust väljas rull, mis tekitab vibratsiooni ja mille inertsimomenti poleks võimalik täpselt arvutada. Viskumine oli antud juhul tingitud toru ebaühtlasest seinapaksusest ja kõverusest. Kuna eelmainitud konstruktsiooni ei olnud võimalik kasutada ja polnud ka leida sobiva hinnaga kalibreeritud seinaga toru siis järgmiseks lahenduseks oli 70 mm diameetriga terasest ümarmaterjal (joonis 4.3). Ümarmaterjali puhul diameetri vähendamine tulenes sellest, et mitte ajada liiga suureks inertsimomenti ja rulliku kaalu. Lisaks eelpool mainitule oli materjal ka koheselt võtta. All on toodud ära joonised mõlemast rulliku variandist. 22

23 Joonis 4.2. Esimese valmistatud rulliku koost: 1 paksuseinaline toru, 2,3 otsakorgid, 4 võll Täismaterjali puhul ei tundunud otstarbekas rulliku laagripukkidele kinnitamiseks lisa võlli valmistamine ja kinnitamine. Nii rullikud, kui ka mõlemast rulliku otsast välja ulatuvad võllid said treitud korraga ühest toorikust. Sellisel juhul kadus ära ka vajadus rulli ja võlli omavahel kinnitada. Rulliku treimisel esines ka probleem, mille tagajärjel polnud võimalik rulliku lõplikuks välisdiameetriks jätta 70 mm. Toorik mahtus küll treipingi padrunisse, kuid sügavamale mitte. Seetõttu polnud võimalik toorikule teha tsentriauku pingis vaid see tuli teha käsitsi. Käsitsi märkimisel ja puurimisel ei saanud see täpselt tsentrisse ja selleks, et vältida rulliku viskumist pidi välisdiameetri treima 67 mm peale. Antud mõõt oli suurim võimalik mõõt, mis oli võimalik saavutada kogu rulliku välispinna treimisel. Võimalikult täpse tulemuse saamiseks sai rullik treitud valmis ühe korraga st detaili vahepealt padrunist lahti laskmata. Joonis 4.3. Kasutuses olev rullik 23
24 Võimaluse korral peaks eelistama just torust valmistatud rullikut seetõttu, et eelpool mainitud täismaterjalist rullik kaalub 14,4 kg võrreldes torust valmistatuga, mille kaaluks on vaid 7,4 kg. Inertsimoment on suurema raadiusega rullikul samuti suurem ehk 0,0129 kg*m 2 võrreldes täismaterjali omaga, mis on 0,008 kg*m 2. Kuna probleem oli sobiva materjali leidmises ja selle töötlemise keerukuses osutus välituks just täismaterjalist rullik. Rulle kandva ja toetava raami (joonis 4.4) koostamise puhul peeti materjali valikul silmas seda, et kasutatav materjal oleks piisavalt tugev, odav ja hea saadavusega, hästi keevitatav ja mehaaniliselt töödeldav. Valituks osutus 40x40 mm terasest nelikant toru, mis sai valitud 2,5 mm seinapaksusega. Nelikant toru laiuse valikul oli ka silmas peetud seda, et sinna oleks võimalik kinnitada laagripukid ilma lisakonstruktsioone valmistamata. Materjali poolest oleks sobinud paremini isegi alumiinium kuna on piisava tugevusega, seda on lihtsam puurida ja freesida, samuti oleks andnud see kokkuvõttes kergema kaalu. Valituks aga ei osutunud alumiinium oma kallima hinna ja keerulisema keevitustehnoloogia tõttu. Raam, millele toetub rullik on valmistatud neljast nelikant toru tükist, mille otsad on lõigatud 45 kraadise nurga alla. Raam on kokku sobitatud, keevitatud igast küljest ja keevised maha lihvitud. Alternatiivseks lahenduseks oleks olnud ka otstesse tehtavad poltühendused kuid sellisel juhul oleks olnud keerukas valmistada raam tasapinnalisena, samuti oleks jäänud hilisemalt segama väljaulatuvad poldipead. Laagripukk kinnitub raamile kahe M12 poldiga (joonis 4.5). Raami aluse pinna siledana hoidmise eesmärgil on valmistatud poldid ilma peata, selle asemel on neil aste. Raamile on alumisse osasse puuritud 14 mm ava ja ülemisse rulliku poolsesse ossa 12 mm ava. Poldid on valmistatud selliselt, et alt polti sisestades jääb poldi keerme poolne rant ülemise serva taha ja poldi alumine ots jääb 14 mm ava sisse 1mm sügavusele. Seejärel on poldi tagumised osad keevitatud kokku raami alumise osaga ja pind siledaks lihvitud. Poldis oleva astme eesmärk on laagripuki kinnitamisel kanda koormus ühtlaselt nelikant toru nii alumisele, kui ka ülemisele pinnale. Rulliku eemaldamiseks on sellisel puhul vaja ainult eemaldada 4 mutrit ja seibi. Allpool on näidatud kasutatav raam (joonis 4.4) ja laagripukkide kinnituseks kasutatud poldid (joonis 4.5). 24


25 Joonis 4.4. Rulliku alune raam Joonis 4.5. Laagripukkide kinnitamiseks kasutatav polt Laagripukki (joonis 4.6) on eelistatud tavalisele radiaalkuullaagrile seetõttu, et oleks olemas võimalus laagreid lihtsalt määrida ja rullikud oleks võimalik seadistada teineteisega paralleelseks. Laagripuki kinnitusavad on ovaalsed ja võimaldavad rullikuid nihutada 8 mm ulatuses üksteise suhtes. 25

. Joonis 4.7. Alusraam koos ülemise lisaraamiga Lisaraamile kinnituv korpus on valmistatud 3 mm paksusest löögikindlast")
26 Joonis 4.6. Y- laagripukk [23] Stendi kasutamisel ohutuse tagamiseks on stendi raam ja rullikud kaetud korpusega, mis jätab välja ainult 1/4 rullikute pealmisest osast. Korpuse kinnitamiseks on alusraamile keevitatud nelikant torust lisaraam (joonis 4.7). Joonis 4.7. Alusraam koos ülemise lisaraamiga Lisaraamile kinnituv korpus on valmistatud 3 mm paksusest löögikindlast polükarbonaadist. Polükarbonaati on eelistatud just tema tugevuse, odavuse ja kerge mehaanilise töötluse poolest. 26

27 Korpuse kinnitamiseks on kasutatud 5 mm sisekuuskant peaga polte. Poldipeade jaoks on korpuse avadesse töödeldud süvendid, et poldid ei ulatuks korpuse tasapinnast välja. Lisaks on korpuse peale kinnitatud aasad, et oleks võimalik mudel mõõtmiste ajaks rullikule kinnitada. Korpus on lõigatud välja lehtmaterjalist ja kõik korpuse osad on tasapinnalised iga külje jaoks on oma detail ja paindeid tehtud pole. Rulliku raamide üksteise suhtes liigutamiseks on kasutusel 30x30 mm nurkrauad, millest on koostatud eraldi ristküliku kujuline raam (joonis 4.8). Üks rulliku tugiraamidest on kinnitatud nelja poldiga kummastki küljest kahe poldiga nurkraua külge. Teise raami tarbeks on freesitud nurkraudadesse 8 mm laiused ja 450 mm pikkused sooned. Liikuva rulliku raam on kinnitatud samuti mõlemast küljest kahe poldiga, mis on paigutatud läbi freesitud soone. Selliselt on võimalik reguleerida rullikute omavahelist kaugust vastavalt stendis olevale mudelile. Sobiliku kauguse puhul tuleb fikseerida liikuva raami neli polti, et välistada rullikute nihkumine mõõtmise käigus. Joonis 4.8. Alusraam Esialgselt oli kavas raami alus selliseks jätta. Hiljem proovimise käigus selgus, et paigaldatud rullidega jääb nurkraud stendi liigutades läbi painduma. Kuna stend peab olema mobiilne siis ei olnud võimalik riskeerida nurkraudade püsiva deformatsiooni tekkega. Antud probleemi lahenduseks oli 30x30 mm nelikant toru, mis on ühendatud keevisliitega nurkraua alla (joonis 4.8). Sellise lahenduse puhul muutus mugavamaks ka liikuva raami kinnitusmutrite keeramine. 27

.")
28 Stendi koostades muutus problemaatiliseks ka selle liigutamine suure massi tõttu. Kuna otstarbekas oleks lahendus, kus stendi on võimalik teisaldada mugavalt ka ühel inimesel siis on stendi statsionaarse rulliku poolsesse otsa puuritud raami augud. Nendesse aukudesse on võimalik kinnitada transpordi ajaks polüatsetaalist (POM) valmistatud rattad (joonis 4.9). Sellisel juhul piisab stendi transpordi asendisse paigutamiseks liikuva rulliku raami kinnitamisest vastu liikumatut raami ja rataste kinnitamisest alusraamile (joonis 4.10). Rattavõlli lukustamiseks raamile on võlli otsa puuritud ava, millest on võimalik läbi torgata lukustussplint. Joonis 4.9. Transpordiks mõeldud rattad koos kinnitusvõlliga Joonis Alusraam koos transpordiks paigaldatud ratastega 28

29 Eelpool nimetatud osadest saadud koostul (joonis 4.11) on näha stendi mehaaniline osa. Antud koostust on puudu pöörete lugemiseks vajalik andur ja stendi korpuse katted. Joonis Stendi koost ilma kateteta 4.3. Elektroonika Elektroonikat on antud projektis koostataval dünostendil vähe. Pealmiselt koosneb süsteem infrapuna andurist ja arendusplaadist Arduino Uno [24]. Stendi tööpõhimõte on toodud välja joonisel

30 Joonis Plokkskeem Stendi tööpõhimõte seisneb rulliku pideva pöörlemiskiiruse jälgimises kogu kiirenduse vältel. Rulliku pöörlemiskiiruse lugemiseks oli esialgu kasutusel optiline peegelsidesti, millega oli võimalik kindlaks teha rulliku otsale värvitud tumedat ja heledat pinda. Kuna peegelsidestil asub saatja ja vastuvõtja samas korpuses ja detekteeritakse peegeldunud valgust siis tekitas probleeme üleminek erinevat värvi pindade vahel. Aeg-ajalt jäi üleminek lugemata või loeti mitu korda, mis tekitas valeandmed graafikule. Edasiarendusena on kasutusel rulli otsas asuv terasest ketas (joonis 4.13), millel on võrdsete vahemike tagant 10 ketta otspinnast välja ulatuvat hammast. Hammaste lugemiseks on kasutusel optiline andur iga hamba möödumine andurist kutsub esile valguskiire katkestuse, mis muudetakse elektriliseks digitaalseks signaaliks. Võimalikult täpsete pöörete teada saamiseks loetakse ära signaali katkestuste vaheline aeg. Kuna nii on teada periood siis on võimalik arvutada välja pöörlemissagedus. Joonis Hammastega ketas, mille järgi loetakse rulliku pöörded 30
![Optiliseks anduriks on kahvel tüüpi optiline andur TCST2300 (joonis 4.14) [25], mille harude vahel ringleb katkestusi esile kutsuv ketas.](/docs-images/118/229181366/images/31-0.jpg "Kahvli ühes harus on infrapuna diood, mis tekitab infrapuna kiirgust ja teises harus on detektor, mille takistus muutub vastavalt infrapuna kiirguse tugevusele.")
31 Optiliseks anduriks on kahvel tüüpi optiline andur TCST2300 (joonis 4.14) [25], mille harude vahel ringleb katkestusi esile kutsuv ketas. Kahvli ühes harus on infrapuna diood, mis tekitab infrapuna kiirgust ja teises harus on detektor, mille takistus muutub vastavalt infrapuna kiirguse tugevusele. Infrapuna dioodile jõuab 5 V pinge läbi 220 oomise takisti kohe, kui seade on ühendatud arvutiga. Detektori ühele jalale on toodud otse arendusplaadilt 5 V, detektori teine jalg on maandatud läbi 10 kilooomise takisti. Samalt jalalt on võetud ka sisend arendusplaadile katkestuste lugemiseks. Olukorras, kus ketta hammas on anduri harude vahel ja infrapuna kiirgust detektorisse ei jõua on arendusplaadi sisendis 0 V. Kui ketas liigub ja infrapuna kiirgus levib detektorini muudab see detektori takistust väiksemaks ja arendusplaadi sisendisse jõuab 5 V. Skeem anduri ja arendusplaadi ühenduste kohta on ära toodud joonisel Selliselt saadakse teada pulsside periood ja sagedus, mis saadetakse üle USB liidese arvutisse ja mida kasutatakse edaspidistes arvutustes. Kasutusel olev andur on varustatud päevavalguse filtriga, mis ei lase keskkonnas levival kiirgusel rikkuda mõõtetulemust. Joonis Rulliku kiiruse mõõtmiseks kasutatav andur [25] 31

32 Joonis Anduri ja arendusplaadi ühendus Andurist tuleva signaali lugemise ja impulsside vahelise aja arvutamiseks on kasutusel arendusplaat Arduino Uno (joonis 4.16). Arendusplaadi programmeerimiseks on kasutusel vabavaraline programm Arduino. Antud arendusplaadi valiku põhjuseks on odav hind, kasutajasõbralik tarkvara programmeerimiseks ja kommunikatsiooniks ning lai valik analoog ja digitaalseid sisendeid ja väljundeid. Arduino Uno ühendub arvutiga läbi USB liidese, mis teeb selle kasutamise mugavaks ja kiireks. Tabelis 4.1 on toodud ära Arduino Uno andmed. Joonis Arduino Uno arendusplaat [24] 32
33 Tabel 4.1. Arduino Uno andmed Kasutatav protsessor Atmega328 Tööpinge 5 V Soovitatav sisendpinge 7-12 V Digitaalseid sisendeid/väljundeid 14, millest kuut on võimalik kasutada pulsipikkuse modulatsiooniks (PWM) Analoog sisendeid 6 Maksimaalne voolutugevus sisend/väljundviigul 40 ma Välkmälu 32 kb Taktsagedus 16 MHz 4.4. Tarkvara Tarkvara loomiseks on kasutatud National Instrumendi visuaalprogrammeerimise tarkvara LabView [26]. Antud programmi eeliseks on mugav ühenduste loomine väliste seadmetega ja väga mitmekülgne kasutajaliidese loomise süsteem. Võimalus oleks olnud kasutada ka näiteks sellist lahendust, kus Arduino oleks salvestanud saadud andmed massiivi ja peale mõõtmise lõppu saatnud massiivi arvutisse. Hiljem oleks olnud võimalik andmed töödelda ja kuvada vastavalt graafikud näiteks Microsoft Excelis. Selline lahendus oleks olnud küll lihtsam programmeerida ja valmistada, kuid sellisel juhul oleks terviklik süsteem kaotanud väga palju kasutusmugavuses. Teiseks võimaluseks oleks olnud Visual Basicu kasutamine tervikliku keskkonna loomiseks ja arvutuste tegemiseks kuid vähese praktika tõttu antud programmeerimiskeeles oleks antud ülesanne osutunud liiga keeruliseks ja ajamahukaks. Kuna üheks tingimuseks seadme projekteerimise käigus oli ka reaalajas kuvatav graafik siis selle tingimuse täitmiseks sobis kõige paremini ülal mainitud LabView. Rullikute pöörete arvutamine toimub antud programmi sees iga 150 ms järel vastavalt Arduinost saadetavatele andmetele. 150 ms on valitud katseliselt, et saavutada graafikutele optimaalne resolutsioon. Arduino Uno loeb iga hamba möödumiseks kulunud aja ja see 33
, et oleks võimalik kasutata nurkkiiruse arvutatud väärtust ja nurkkiiruse eelmist väärtust.")
34 saadetakse üle USB liidese arvutisse. Antud ajast arvutatakse programmi siseselt välja mitu pööret teeks rullik minutis (rpm). Saadud andmed teisendatakse rulliku nurkkiiruseks rad/s. Nurkkiiruse väärtus salvestatakse iga tsükli järel programmi tsükli sisesesse muutujasse (shift register), et oleks võimalik kasutata nurkkiiruse arvutatud väärtust ja nurkkiiruse eelmist väärtust. Nende kahe väärtuse vahe abil saab leida nurkkiirenduse. Nurkkiirenduse ja inertsimomendi korrutisena saadakse pöördemoment, millest leitakse võimsus [27]. Et saavutada reaalajas nähtav graafik tehakse kõik arvutused tsüklisiseselt läbi sama sagedusega, kui Arduino saadab andmeid. Arduni Uno kood on ära toodud lisas B. Kasutajale nähtavas programmiosas (joonis 4.17) on reaalajas joonistuv graafik. Kasutajal on programmisiseselt võimalik määrata, kas kasutatakse mõõtmiseks ühte või kahte rullikut, läbi millise virtuaalse COM pordi Arduino on ühendatud arvutiga ja millise hammaste arvuga ketast kasutatakse rulliku pöörete lugemisel. Lisaks on jäetud võimalus muuta rullikute inertsimomenti juhuks, kui neid muudetakse või välja vahetatakse. Võimalus on valida, kas graafiku x-teljel kuvatakse rulliku pöördeid (rpm) või rullikute joonkiirust (km/h). Lisaks võimsus ja pöördemomendi graafikule saab ekraanil kuvada ka näiteks pöörete, pöördemomendi, võimsuse, nurkkiiruse ja nurkkiirenduse sõltuvust ajast. Joonis Kasutajale kuvatav programmi esipaneel Graafikule kuvatavad otse mõõtmistest saadud andmed on vajalik töödelda kuna mõõtmise käigus võib esineda vigu. Programmi siseselt on piiratud ära rulliku pöörete väärtused. 34
35 Ebaloogilised väärtused, näiteks negatiivsed arvud on välistatud selliselt, et neid edasiseks töötlemiseks ei saadeta. Vahetult enne graafikule kuvamist andmed optimeeritakse LabView blokki polynomial fit kasutades. Antud blokil on erinevad muutujad, mida kasutajal on võimalik muuta. Muutujatest sõltub graafiku optimeerimise suurus nende väärtuste leidmiseks on vajalik teostada mõned proovimõõtmised. Optimeerimata andmed (joonis 4.18) võivad mõõteviga sisaldades anda vale ettekujutluse maksimaalset võimsusest ja pöördemomendist. Samuti muutub kiirenduse vähenedes graafikul kuvatavate punktide tihendus suuremaks. Optimeeritud andmetes (joonis 4.18) jäetakse arvestamata üksikud tulemused, mis kalduvad mõõdetud tulemustest selgelt kõrvale. Samuti silutakse graafiku joone kuju, mis annab selgema ülevaate tulemustest. Joonis Graafikul kuvatud optimeeritud ja optimeerimata andmed Kuna tegemist on visuaalprogrammeerimise tarkvaraga siis tarkvaral koodi kui sellist ei kasutata. Programmi koostamine toimub erinevate blokkide ühendamise ja nendele väärtuste andmisega. Võimalused erinevate ühenduste loomiseks väliste seadmetega, arvutuste ja tsüklite koostamine on kindlasti lihtsam ja mugavam, kui näiteks standartsetes programmeerimiskeeltes või keskkondades. Lisas A on toodud ära ka kogu ühendust ja andmetöötlust teostava programmi pilt. Stendi kasutamiseks tuleb enne mõõtmise algust programm käivitada. Käivitamisel alustatakse tsüklit ja hakatakse lugema stendist läbi Arduino saadetud andmeid. Peale käivitamist ei ole tähtis, kui kiiresti algab rullikute kiirendamine, mõõtmistulemusi ei mõjuta käivitamise ja mõõtmise vaheline aeg. Katset eraldi lõpetada ei ole vajalik, programm lõpetab töö automaatselt, kui rulliku kiirus hakkab vähenema. Peale programmi lõpetamist on nähtav lõplik graafik, mida on võimalik salvestada. Uue katse alustamisel 35
36 kustutatakse graafikult andmed eelmise katse kohta ja neid taastada pole enam võimalik. Peale igat mõõtmist on võimalik graafikule kuvatud andmed salvestada tabeltöötlusprogrammi formaadis edasiseks analüüsimiseks. Kuna stendi esialgsel versioonil loetakse kiirust ainult ühel rullikul siis neliveolise auto mõõtmisel korrutatakse inertsimoment kahega. Selline lahendus eeldab, et kasutusel on nelikveo süsteem, kus nii esi- kui ka tagasild on pideva veoga. Valdaval enamusel mudelitest nelikvedu just nii ongi lahendatud. 36

37 5. LÕPLIK LAHENDUS 5.1. Koost Antud jaotises on toodud ära stendi lõplik koost koos lühikese kokkuvõttega kasutatud detailidest ja materjalidest Joonis 5.1. Stendi koost: 1 - statsionaarne raam, 2 - laagripukk, 3 - rullikud, 4 - liikuv raam koos korpusega, 5 - ratas, 6 - alusraam, 7 - lukustusmutrid, 8 - pöörlemisanduri ja ketta kaitse Dünostendi konstrueerimise ja ehitamise käigus toimusid mõningad tehnilised muudatused, mille põhjusteks olid kasutusmugavuse ja vastupidavuse suurendamine. Stendi lõplik konstruktsioon on näha joonisel 5.1 ja pilt stendist joonisel 5.2. Stendi alusraam, rullikute raamid ja korpuse kinnitusraamid on valmistatud terasest. Antud materjali on kasutatud odava hinna, laia kättesaadavuse ja hea keevitatavuse tõttu. Terase puuduseks on suur erikaal, mis muudab kogu stendi massi suureks, kuid samas tagab see stabiilsuse mõõtmise ajal. Mõõtmiseks kasutatavad rullikud on valmistatud samuti terasest saavutamaks piisavat jäikust ja inertsimomenti. 37

38 Korpus on valmistatud polükarbonaadist, mis on kergesti töödeldav termoplast. Polükarbonaat on läbipaistev, hea löögitaluvusega tugev materjal, mistõttu sobib see hästi antud otstarbeks. [28] Stendi iseloomustavad suurused: Laius: 586 mm; Pikkus: 1050 mm; Rullikute tsentrite vahe: mm; Kõrgus: 120 mm; Mass: 65 kg; Maksimaalne lubatud kiirus: 126 km/h; Maksimaalne mõõdetava mudeli mass 20 kg; Maksimaalne mudeli laius 500 mm. Joonis 5.2. Pilt valmis stendist Maksumus Dünostendi konstrueerimisel lähtuti sellest, et seade tuleks võimalikult madala omahinnaga. Tabelis 5.1 on toodud välja stendi ehituseks kulunud materjalide hind. 38
39 Osaliselt on hinnad umbkaudsed, kuna palju asju õnnestus saada tasuta või olid juba enne olemas. Tabel 5.1. Materjali kulu ja hinnad Materjal Kogus Hind 70 mm võll 1,2 m mm nelikant toru 2,5 m mm nelikant toru 4 m mm nelikant toru 2,5 m mm nurkraud 2,5 m 8 M5 polt roostevaba 50 tk 10 Kiiruse lugemise ketas 1 tk 5 Laagripukk 2 tk 18 Arduino Uno 1 tk 25 Infrapuna andur 1 tk 3 Polükarbonaat 2 m 2 10 Värv 0,5 l 10 Kinnitusaas 4 tk 13 Kokku: 170 Tabelis 5.1 on välja toodud ainult materjalide hind. Arvestamata on erinevate detailide töötlemine ja stendi koostamisele kulunud aeg. Aega on stendi konstrueerimiseks ja ehituseks kulunud hinnanguliselt 100 töötundi, millest 15 tundi kulus treitöödeks ja 5 tundi keevitustöödeks. Tarkvara välja töötamiseks ja loomiseks kulus hinnanguliselt 80 tundi. 39
40 5.2 Katsed ja mõõtmistulemused Käesolevas osas on antud ülevaade mõõtmisest, mis on teostatud valmistatud stendiga. Mõõtmiste vahel on võimalusel teostatud mudeli seadistamist või mootori remonti, et jälgida reaalselt näitajate muutusi. Mudeli kirjelduses on toodud ära mootori ja jõuülekande seisukord ja täpsed näitajad. Esimeseks katseks on valitud bensiini toitel mootoriga mudel: Mootor: 23/26 cm 3 2- taktiline; Jõuülekanne: tsentrifugaalsidur, hammasratasülekanne; Mootori seisukord: kulunud; Jõuülekande seisukord: kulunud; Mootori tehasepoolne väljundvõimsus: 1,6 kw. Antud mudeli esimesed mõõtmised on tehtud olukorras, kus mootori töömaht on 23cm 3. Mootor on kulunud ja kompressioon nõrk. Käivitub korralikult, kuid kõrgematel pööretel hästi ei käi. Esimese mõõtmise tulemuseks on saadud 2,16 N m ja 365 W. Antud tulemus on saadud kõige paremate karburaatori seadetega (joonis 5.4). Peale mõõtmist on antud masinal vahetatud kolb ja silinder suuremate vastu saades töömahuks 26 cm 3. Tegemist oli kasutatud, kuid korralike osadega. Peale vahetust ja karburaatori seadistamist saadud tulemus on näha joonisel 5.5. Maksimaalseks võimsuseks saadi 435 W ja pöördemomendiks 2,44 N m. Lõppkiirus mõõtmise käigus suurenes 12 km/h, võimsus suurenes 70 W ja pöördemoment 0,28 N m. 40
41 Joonis 5.4. Esimene mõõtmine Joonis 5.5. Mõõtmine peale silindri ja kolvi vahetust Antud katse käigus oli selgelt näha võimsuse ja pöördemomendi juurdekasv peale silindri ja kolvi vahetust. Joonisel 5.5 oleval graafikul saadud tulemus on saadud parima karburaatori seadistusega. 41
42 5.3. Kasutusjuhend Enne dünostendi kasutamist tuleks see paigaldada kindlale tasasele pinnale. Mõõtmise ajaks tuleks eemaldada raami küljest rattad. Dünostendi paigaldades peab veenduma, et ümber stendi on jäetud küllaldane ruum liikumiseks ja autode paigutamiseks. Kasutades sisepõlemismootoriga masinaid on kinnises ruumis vajalik kasutada kohtventilatsiooni väljalaske gaaside ära juhtimiseks. Stendile on lubatud paigutada vaid neid mudeleid, mis sobivad oma gabariitmõõtmete poolest antud stendile. Paigutades mudeli rullikutele ei tohi mudeli vedavad rattad ulatuda üle rulliku ääre. Mudel tuleb stendile paigutada nii, et ratta ja rulliku tsentrid oleks kohakuti. Kasutades nelikveolist mudelit tuleb stendi rullikute vahelist kaugust reguleerida liikuva raami liigutamisega. Raami liigutamiseks tuleb keerata lahti neli raami külgedel asetsevat mutrit. Peale vajaliku vahekauguse saavutamist tuleb eelpool mainitud mutrid kinni keerata. Auto tuleb stendile paigutada selliselt, et tagumine sild jääb statsionaarsel raamil olevale rullikule. Mudeli kinnitamiseks stendile on stendi neli kinnitusaasa. Soovitav on mudel kinnitada kasutades kõiki nelja kinnitusaasa. Mudeli külge käivad kinnitused tuleb paigutada detailide külge, mis vastavat koormust ilma deformatsiooni või purunemiseta kannatavad. Kinnitamise käigus tuleb mudel kergelt vastu rullikuid suruda saavutamaks paremat haaret ratta ja rulliku vahel. Peale mudeli kinnitamist rullikule tuleb mudelil lasta vaiksel kiirusel rullikutel sõita. Selle käigus peab veenduma, et mudel püsib rullikutel sirgelt ja stabiilselt. Ühendades dünostendi arvutiga võib käivitada vastava programmi mõõtmiseks. Esmalt tuleb valida korrektne COM liides kommunikatsiooni loomiseks programmi ja arendusplaadi vahel. Programmisiseselt on võimalik valida, kas tegemist on tagaveolise või nelikveolise mudeliga ja kas graafikul kuvatakse peale optimeeritud andmete ka optimeerimata andmed. 42
43 Mõõtmise alustamiseks tuleb vajutada START nuppu. Peale seda võib mudeliga kiirendada kuni programm lõpetab mõõtmise. Mõõtmine lõpetatakse automaatselt, kui rulliku kiirus hakkab vähenema. Peale mõõtmise lõppu on graafikul näha mõõdetud tulemused. Lisaks on välja toodud maksimaalne pöördemoment ja võimsus. Soovi korral on võimalik salvestada ka mõõdetud andmed tabeltöötluse formaadis vajutades hiire parema nupuga graafikule ja valides export data to Excel. Selle tulemusena avaneb tabeltöötluse fail, mida on võimalik salvestada ja edaspidiselt kasutada. Vajutades uuesti nuppu START alustatakse uue mõõtmisega ja vanad andmed kustutatakse graafikult. Kuna tarkvara puhul on tegemist test versiooniga võib aeg ajalt mõõtmine lõppeda enne, kui masin on kiiruse üles saanud. Sellisel juhul tuleb mõõtmist korrata. Mõõtmise lõppedes võib sulgeda programmi ja eemaldada ühenduskaabli stendi ja arvuti vahelt Stendi võimalik edasiarendus Antud töö käigus valminud dünostendiga on võimalik mõõta võimsust mudelauto ratastelt. Stendi võimalik edasiarendus muudaks täpsemaks mõõdetud andmed ja võimaldaks teostada mitmekesisemaid mõõtmisi Mootori pöörete lugemine Lisades arendusplaadile juurde mooduli mõõdetava mudeli mootori pöörete lugemiseks oleks võimalik kuvada võimsuse ja pöördemomendi graafiku x teljele mootori pöörded. See annaks täpsema info, millises pööretevahemikus oleks kõige optimaalsem mootorit töö 43
44 käigus hoida. Vastavalt sellele saaks valida jõuülekanded ja tsentrifugaalsiduri parameetrid. Mootori pöörete lugemine bensiinitoitega sisepõlemismootorite puhul ei ole väga keeruline, piisaks sellest, kui mõõta süüteküünla kõrgepinge juhtme impulsse. Impulsside sageduse järgi oleks võimalik arvutada mootori pöörded. Elektrimootorite puhul oleks võimalik see info saada näiteks pööreteregulaatorist aga kuna elektrimootoritega mudelitel sidur puudub siis on mootori pöörded võimalik ka ülekandearvu järgi välja arvutada Temperatuuri, õhurõhu ja niiskuse mõõtmine Erinevate ilmastikutingimuste puhul on mootorist saavutatav võimsus erinev. Madalama sisselaske temperatuuri ja kõrgema õhurõhu puhul on mootori väljundvõimsus suurem. Mõõtes eelpool mainitud näitajaid on võimalik viia sisse parandustegurid, mis on kindlaks määratud erinevate standardite poolt (ISO 1585, DIN 70020). Kasutades parandustegurit viiakse ilmastikutingimustest sõltuv võimsuse kasv või kahanemine võimalikult väikeseks. Õhurõhu, temperatuuri ja niiskuse mõõtmiseks on võimalik valida moodul, kus on kõik andurid ühes korpuses ja mõõdetavad andmed edastatakse digitaalselt. [29] Heitgaaside mõõtmine Mootoris toimuva põlemisprotsessi täpsemaks jälgimiseks on võimalik kasutada lambda andurit. Lambda andur mõõdab heitgaasides hapniku ja kütuse vahekorda. Kõige optimaalsema põlemisprotsessi korral on hapniku ja kütuse vahekord 14,7:1. Heitgaaside jälgimine on tähtis seetõttu, et liiga vaese (vahekord 14,7...:1) segu korral läheb põlemistemperatuur väga kõrgeks ja võib sulatada kolvi või silindri. Kõige otstarbekam on kasutada lairiba lambda andurit, millega on võimalik mõõta segu vahekorda 8:1...22:1 [30]. 44
45 Mootori võimsuse mõõtmine Valmistades eraldi raami rulliku otsa oleks võimalik sinna kinnitada mootor ja mõõta otse mootori võimsust. Sellisel juhul oleks kiirendatavaks hoorattaks üks rullikutest. Selle abil oleks võimalik mootorit täpsemini seadistada ja teha kindlaks kaod jõuülekandes. Antud täienduse puhul oleks vajalik täpsem mõõtmine ja joonestamine kuna lihtsam võib olla eraldiseisva mootoridüno ehitus Tarkvara täiustamine Dünostendi mugavamaks ja täpsemaks kasutamiseks oleks võimalik programmi täiustada selliselt, et mõõtmine algaks automaatselt kiirenduse alguses. Selleks peaks pidevalt lugema rulliku pöördeid ja kohe, kui rullik hakkab liikuma käivitatakse ka mõõtmine. Lisaks sellele oleks võimalik lisada kõikide mõõdetud andmete välja trükkimise võimalus. Täpsemaks mõõtmiseks oleks vajalik suurendada arendusplaadi poolt saadetavate andmete sagedust, hetkel saadakse 3 sekundilise kiirenduse juures graafikule 20 punkti. Selline resolutsioon annab juba küll võrdlemisi täpse tulemuse kuid võimsamate masinate puhul, mis kiirendavad sellest palju kiiremini, jääb sellisest andmete sagedusest väheks. Nelikveoliste mudelite võimsuse täpsemaks hindamiseks on võimalik lisada pöörete lugemise andur ka teisele rullile. See eeldaks keerulisema tarkvara loomist nii arvutile, kui ka arendusplaadile. 45
46 KOKKUVÕTE Käesoleva töö käigus on valminud mudelautode dünostend, millest võiks olla abi paljudele modellistidele oma autode seadistamisel. Dünostendi lõplik lahendus vastab paika pandud eesmärkidele ja on reaalselt kasutatav. Stendi ei saa hetkel lugeda valmis tooteks stendi hinna alandamiseks, täpsuse ja kasutusmugavuse suurendamiseks on võimalik sisse viia palju tehnilisi parandusi ja täiustusi. Lisaks antud töös mainitud võimalikele tehnilistele täiendustele lisandub neid kindlasti ka pikaajalisema stendi katsetamise ja kasutamise käigus. Stendi projekteerimise ja valmistamise käigus tekkinud probleemidele, näiteks sobiva materjali leidmiseks rullikutele, on leitud töötavad lahendused. Kindlasti tasub ka antud teemat uurida, on võimalik et stendi ehituseks valmistatud detaile on võimalik osta valmiskujul. Kuna stendi pole olnud võimalik veel väga palju testida siis ei ole võimalik täpselt hinnata selle täpsust näiteks erinevate temperatuuride korral. Stendi rullikud on paigutatud määritavatele kuullaagritele ja tänu sellele peaks antud sõlme vastupidavus olema piisav. Probleemide korral laagerdusega on laagripukid kiiresti ja lihtsalt vahetatavad. Tänu võimalusele paigaldada raamile alla rattad on stend teisaldatav ilma lahti monteerimata. Hetkel graafikule kuvatavate andmete resolutsioon on rahuldav, edaspidise täiendamise käigus võiks suurendada arendusplaadilt arvutisse saadetavate andmete sagedust. Suurema sagedusega saadetud andmed muudaksid mõõtetulemuse täpsemaks ja graafikul mõõtepunkte ühendava joone sujuvamaks. Lisaks sellele oleks edaspidiselt lisada programmi võimalus mõõtmise automaatseks käivitamiseks kohe, kui rullikud on hakanud liikuma. Mõõtmise lõppedes peaks olemas olema võimalus graafiku ja mõõdetud andmete trükkimiseks. Üheks edasiseks arenguks dünostendil peaks kindlasti olema alusraami ja rullikute raamide konstruktsiooni optimeerimine selliselt, et raamil säiliks piisav tugevus. See peaks endas sisaldama raami materjalikulu ja kaalu vähendamist ning kujult lihtsate detailide kasutamist, mis muudaks odavamaks ja kiiremaks detailide valmistamise. 46
47 Antud töö koostamine käsikäes stendi projekteerimise ja ehitusega oli mitmeti kasulik. Kindlasti aitas see ära hoida või vähemalt minimaliseerida erinevate tehniliste lahenduste loomise käigus tekkivaid probleeme. Enamasti oli mingi kindla sõlme või detaili projekteerimise järel võimalik see valmistada ja proovida kokku sobivust ülejäänud detailidega. 47
48 KIRJANDUS 1. Froudehofmann.com. History Froudehofmann.com. Kättesaadav: ( ) 2. Land & Sea Inc. Snowmobile Engine Dynamometer. Land & Sea Inc. Kättesaadav: ( ) 3. Power Test Dynamometers. What is an Engine Dynamometer?. Power Test Dynamometers. Kättesaadav: ( ) 4. Excelleration. Revolution inertia engine dynamometer. Revolution inertia dyno. Kättesaadav: ( ) 5. Babcock, B.E. Dyno RC engine The Design, Construction, and Use of a SMALL PRONY BRAKE Gas Engine Magazine. Kättesaadav: ( ) 6. Christiansen, J. ½ Scale Prony Brakes Smokstak.com. Kättesaadav: ( ) 7. Land & Sea Inc. Water brake. Land & Sea Inc. Kättesaadav: ( ) 8. Tokyo Meter. Principle of Eddy-Current Electro Brake Dynamometer. TokyoMeter.co.uk. Kättesaadav: ( ) 9. Tunerc. Can you spin eddy current brake in both directions? Kättesaadav: dbc240 ( ) 10. TAT. Chassis Dyno. TAT Mess-Systeme. Kättesaadav: ( ) 48
49 11. Chairmans, M. Rototest Chassis Dyno Rental Torque Development International. Kättesaadav: ( ) 12. Rusubaru. Drivetrain Loss. Rusubaru.com. Kättesaadav: ( ) 13. DMOne. Self built RC dyno msuk-forum.co.uk. Kättesaadav: ( ) 14. Dyno46. Complete RC Car Inertia Chassis Dynamometer Dyno46. Kättesaadav: ( ) 15. Quick Fix. RC dyno Rcaj.org. Kättesaadav: ( ) 16. Contrast. Dyno RC engine tester th Scale Forum. Kättesaadav: Zenoah-CY ( ) 17. SimpleDyno. Hall of fame. SimpleDyno. Kättesaadav: ( ) 18. James, M. Can Nitro RC Cars and Nitro Airplanes Use the Same Nitro Fuel? About.com. Kättesaadav: ( ) 19. Tower Hobbies. Model engines. EasyRC.com. Kättesaadav: ( ) 20. RCinfotips. Info and Tips for Maximizing your Enjoyment of Radio Control Hobbies. RCinfotips. Kättesaadav: ( ) 21. RCXmodels. HIMOTO 1/16 Road Warrior Carbon Blue Mini Nitro RC Car. RCXmodels. Kättesaadav: ( ) 22. Modellsport. RTR RC cars. Modellsport. Kättesaadav: ( ) 49
50 23. Alas-Kuul. Internetipood. Alas-kuul. Kättesaadav: ( ) 24. Arduino. Arduino UNO. Arduino.cc. Kättesaadav: ( ) 25. TME.eu. Vishay TCST2300. TME.eu. Kättesaadav: ( ) 26. Labview. Labview system design software. Ni.com. Kättesaadav: ( ) 27. Steve. Dynamometer Math WOTID.com. Kättesaadav: ( ) 28. Cityplastics. Polycarbonate. Cityplastics. Kättesaadav: ( ) 29. Rototest Research Institute. Test Information. Rototest-research.eu. Kättesaadav: ( ) 30. HA Motosports. What is wideband oxygen sensor?. Hamotosports.com. Kättesaadav: ( ) 50
51 LISAD 51
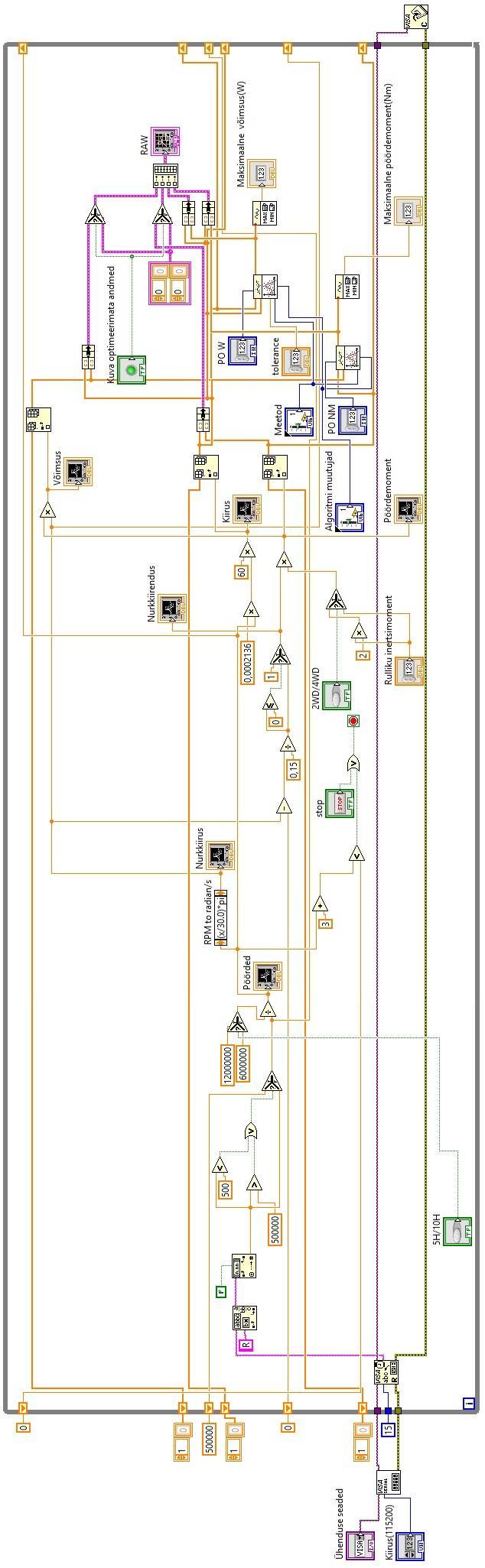
52 LISA A. Visuaalprogrammeerimine 52
Sissejuhatus mehhatroonikasse MHK0120
 Sissejuhatus mehhatroonikasse MHK0120 5. nädala loeng Raavo Josepson raavo.josepson@ttu.ee Pöördliikumine Kulgliikumine Kohavektor Ԧr Kiirus Ԧv = d Ԧr dt Kiirendus Ԧa = dv dt Pöördliikumine Pöördenurk
Sissejuhatus mehhatroonikasse MHK0120 5. nädala loeng Raavo Josepson raavo.josepson@ttu.ee Pöördliikumine Kulgliikumine Kohavektor Ԧr Kiirus Ԧv = d Ԧr dt Kiirendus Ԧa = dv dt Pöördliikumine Pöördenurk
Tarkvaraline raadio Software defined radio (SDR) Jaanus Kalde 2017
 Jaanus Kalde 2017") Tarkvaraline raadio Software defined radio (SDR) Jaanus Kalde 2017 Sissejuhatus Raadiosidest üldiselt Tarkvaraline raadio Kuidas alustada 2 Raadioside Palju siinussignaale õhus Info edastamiseks moduleerid
Tarkvaraline raadio Software defined radio (SDR) Jaanus Kalde 2017 Sissejuhatus Raadiosidest üldiselt Tarkvaraline raadio Kuidas alustada 2 Raadioside Palju siinussignaale õhus Info edastamiseks moduleerid
Kasutusjuhend Dragon Winch vintsile DWM, DWH, DWT seeria Sisukord Üldised ohutusnõuded... 3 Vintsimise ohutusnõuded... 3 Kasulik teada... 4 Vintsimise
 Kasutusjuhend Dragon Winch vintsile DWM, DWH, DWT seeria Sisukord Üldised ohutusnõuded... 3 Vintsimise ohutusnõuded... 3 Kasulik teada... 4 Vintsimisel on hea teada... 5 Vintsi hooldus... 6 Garantii...
Kasutusjuhend Dragon Winch vintsile DWM, DWH, DWT seeria Sisukord Üldised ohutusnõuded... 3 Vintsimise ohutusnõuded... 3 Kasulik teada... 4 Vintsimisel on hea teada... 5 Vintsi hooldus... 6 Garantii...
DUŠINURK MILDA PAIGALDUSJUHEND 1. Enne paigaldustööde alustamist veenduge, et elektrikaablid, veetorud vms ei jääks kruviaukude alla! 2. Puhastage sei
 DUŠINURK MILDA PAIGALDUSJUHEND 1. Enne paigaldustööde alustamist veenduge, et elektrikaablid, veetorud vms ei jääks kruviaukude alla! 2. Puhastage seinad ja põrand enne dušinurga paigaldamist! 3. Kasutage
DUŠINURK MILDA PAIGALDUSJUHEND 1. Enne paigaldustööde alustamist veenduge, et elektrikaablid, veetorud vms ei jääks kruviaukude alla! 2. Puhastage seinad ja põrand enne dušinurga paigaldamist! 3. Kasutage
SEPTIKU JA IMBVÄLAJKU KASUTUS-PAIGALDUS JUHEND 2017
 SEPTIKU JA IMBVÄLAJKU KASUTUS-PAIGALDUS JUHEND 2017 Septiku ja imbväljaku tööprotsessi kirjeldus Üldine info ja asukoha valik: Septik on polüetüleenist (PE) rotovalu süsteemiga valmistatud mahuti, milles
SEPTIKU JA IMBVÄLAJKU KASUTUS-PAIGALDUS JUHEND 2017 Septiku ja imbväljaku tööprotsessi kirjeldus Üldine info ja asukoha valik: Septik on polüetüleenist (PE) rotovalu süsteemiga valmistatud mahuti, milles
SINU UKS DIGITAALSESSE MAAILMA Ruuter Zyxel LTE3302 JUHEND INTERNETI ÜHENDAMISEKS
 SINU UKS DIGITAALSESSE MAAILMA Ruuter Zyxel LTE3302 JUHEND INTERNETI ÜHENDAMISEKS OLULINE TEAVE: LOE ENNE RUUTERI ÜHENDAMIST! Ruuter on sinu uks digitaalsesse maailma. Siit saavad alguse kõik Telia teenused
SINU UKS DIGITAALSESSE MAAILMA Ruuter Zyxel LTE3302 JUHEND INTERNETI ÜHENDAMISEKS OLULINE TEAVE: LOE ENNE RUUTERI ÜHENDAMIST! Ruuter on sinu uks digitaalsesse maailma. Siit saavad alguse kõik Telia teenused
I klassi õlipüüdur kasutusjuhend
 I-KLASSI ÕLIPÜÜDURITE PAIGALDUS- JA HOOLDUSJUHEND PÜÜDURI DEFINITSIOON JPR -i õlipüüdurite ülesandeks on sadevee või tööstusliku heitvee puhastamine heljumist ja õlijääkproduktidest. Püüduri ülesehitus
I-KLASSI ÕLIPÜÜDURITE PAIGALDUS- JA HOOLDUSJUHEND PÜÜDURI DEFINITSIOON JPR -i õlipüüdurite ülesandeks on sadevee või tööstusliku heitvee puhastamine heljumist ja õlijääkproduktidest. Püüduri ülesehitus
KIIRJUHEND Lugege kiirjuhend enne seadme kasutamist hoolikalt läbi. Kõik tärniga (*) märgitud juhised kehtivad WLAN + 3G mudelitele (Lenovo B6000-H(V)
 märgitud juhised kehtivad WLAN + 3G mudelitele (Lenovo B6000-H(V)") KIIRJUHEND Lugege kiirjuhend enne seadme kasutamist hoolikalt läbi. Kõik tärniga (*) märgitud juhised kehtivad WLAN + 3G mudelitele (Lenovo B6000-H(V) / Lenovo B8000-H). Tehnilised andmed Mudeli nimetus
KIIRJUHEND Lugege kiirjuhend enne seadme kasutamist hoolikalt läbi. Kõik tärniga (*) märgitud juhised kehtivad WLAN + 3G mudelitele (Lenovo B6000-H(V) / Lenovo B8000-H). Tehnilised andmed Mudeli nimetus
efo09v2pke.dvi
 Eesti koolinoorte 56. füüsikaolümpiaad 17. jaanuar 2009. a. Piirkondlik voor. Põhikooli ülesanded 1. (VÄRVITILGAD LAUAL) Ühtlaselt ja sirgjooneliselt liikuva horisontaalse laua kohal on kaks paigalseisvat
Eesti koolinoorte 56. füüsikaolümpiaad 17. jaanuar 2009. a. Piirkondlik voor. Põhikooli ülesanded 1. (VÄRVITILGAD LAUAL) Ühtlaselt ja sirgjooneliselt liikuva horisontaalse laua kohal on kaks paigalseisvat
遥控器使用说明书(ROHS) ALPA-CS349-R09D(E)-0301(内容)
 ALPA-CS349-R09D(E)-0301(内容)") KASUTUSJUHEND SIIRDATAV KDITSIEER KAUGJUHTIMISPULDI KASUTUSJUHEND AM-5PR(N) Täname teid, et olete soetanud endale meie õhukonditsioneeri Palun lugege hoolikalt käesolevat kasutusjuhendit enne seadme kasutamist
KASUTUSJUHEND SIIRDATAV KDITSIEER KAUGJUHTIMISPULDI KASUTUSJUHEND AM-5PR(N) Täname teid, et olete soetanud endale meie õhukonditsioneeri Palun lugege hoolikalt käesolevat kasutusjuhendit enne seadme kasutamist
E-arvete juhend
 E- arvete seadistamine ja saatmine Omniva kaudu Standard Books 7.2 põhjal Mai 2015 Sisukord Sissejuhatus... 3 Seadistamine... 3 Registreerimine... 4 E- arve konto... 5 Vastuvõtu eelistus... 5 Valik E-
E- arvete seadistamine ja saatmine Omniva kaudu Standard Books 7.2 põhjal Mai 2015 Sisukord Sissejuhatus... 3 Seadistamine... 3 Registreerimine... 4 E- arve konto... 5 Vastuvõtu eelistus... 5 Valik E-
6 tsooniga keskus WFHC MASTER RF 868MHz & 4 või 6 tsooniga alaseade SLAVE RF KASUTUSJUHEND 6 tsooniga WFHC RF keskus & 4 või 6 tsooniga alaseade SLAVE
 6 tsooniga keskus WFHC MASTER RF 868MHz & 4 või 6 tsooniga alaseade SLAVE RF KASUTUSJUHEND 6 tsooniga WFHC RF keskus & 4 või 6 tsooniga alaseade SLAVE RF 868MHz 3-6 EE 1. KASUTUSJUHEND 6 tsooniga WFHC
6 tsooniga keskus WFHC MASTER RF 868MHz & 4 või 6 tsooniga alaseade SLAVE RF KASUTUSJUHEND 6 tsooniga WFHC RF keskus & 4 või 6 tsooniga alaseade SLAVE RF 868MHz 3-6 EE 1. KASUTUSJUHEND 6 tsooniga WFHC
SPORTident Air+
 Tarmo Klaar 2012-2013 Esimene koolitus Eestis 2012, Põlvas Ülevaade Uus riistvara Vana tarkvara Proovime kasutada, näited Põhineb hetkel teadaoleval funktsionaalsusel. Tootja ei ole veel lõplikku versiooni
Tarmo Klaar 2012-2013 Esimene koolitus Eestis 2012, Põlvas Ülevaade Uus riistvara Vana tarkvara Proovime kasutada, näited Põhineb hetkel teadaoleval funktsionaalsusel. Tootja ei ole veel lõplikku versiooni
PAIGALDUSJUHEND DUŠINURK VESTA 1. Enne paigaldustööde alustamist veenduge, et elektrikaablid, veetorud vms ei jääks kruviaukude alla! 2. Puhastage sei
 PAIGALDUSJUHEND DUŠINURK VESTA 1. Enne paigaldustööde alustamist veenduge, et elektrikaablid, veetorud vms ei jääks kruviaukude alla! 2. Puhastage seinad ja põrand enne dušinurga paigaldamist! 3. Kasutage
PAIGALDUSJUHEND DUŠINURK VESTA 1. Enne paigaldustööde alustamist veenduge, et elektrikaablid, veetorud vms ei jääks kruviaukude alla! 2. Puhastage seinad ja põrand enne dušinurga paigaldamist! 3. Kasutage
Tehniline andmeleht Sadulventiilid (PN 16) VRG 2 2-tee ventiil, väliskeermega VRG 3 3-tee ventiil, väliskeermega Kirjeldus Ventiilid on kasutatavad ko
 VRG 2 2-tee ventiil, väliskeermega VRG 3 3-tee ventiil, väliskeermega Kirjeldus Ventiilid on kasutatavad ko") Tehniline andmeleht Sadulventiilid (PN 16) VRG 2 2-tee ventiil, väliskeermega VRG 3 3-tee ventiil, väliskeermega Kirjeldus Ventiilid on kasutatavad koos AMV(E) 335, AMV(E) 435 ja AMV(E) 438 SU täiturmootoritega.
Tehniline andmeleht Sadulventiilid (PN 16) VRG 2 2-tee ventiil, väliskeermega VRG 3 3-tee ventiil, väliskeermega Kirjeldus Ventiilid on kasutatavad koos AMV(E) 335, AMV(E) 435 ja AMV(E) 438 SU täiturmootoritega.
Septik
 Septik Ecolife 2000 paigaldusjuhend 1. ASUKOHT Septiku asukoha valikul tuleb arvestada järgmiste asjaoludega: pinnase liik, pinnavormid, põhjavee tase, krundi piirid ja vahemaad veekogudeni. Asukoha valikul
Septik Ecolife 2000 paigaldusjuhend 1. ASUKOHT Septiku asukoha valikul tuleb arvestada järgmiste asjaoludega: pinnase liik, pinnavormid, põhjavee tase, krundi piirid ja vahemaad veekogudeni. Asukoha valikul
HCB_hinnakiri2017_kodukale
 Betooni baashinnakiri Hinnakiri kehtib alates 01.04.2016 Töödeldavus S3 Töödeldavus S4 / m 3 /m 3 km-ga / m 3 /m 3 km-ga C 8/10 69 83 71 85 C 12/15 73 88 75 90 C 16/20 75 90 77 92 C 20/25 78 94 80 96 C
Betooni baashinnakiri Hinnakiri kehtib alates 01.04.2016 Töödeldavus S3 Töödeldavus S4 / m 3 /m 3 km-ga / m 3 /m 3 km-ga C 8/10 69 83 71 85 C 12/15 73 88 75 90 C 16/20 75 90 77 92 C 20/25 78 94 80 96 C
Microsoft Word - Toetuste veebikaardi juhend
 Toetuste veebikaardi juhend Toetuste veebikaardi ülesehitus Joonis 1 Toetuste veebikaardi vaade Toetuste veebikaardi vaade jaguneb tinglikult kaheks: 1) Statistika valikute osa 2) Kaardiaken Statistika
Toetuste veebikaardi juhend Toetuste veebikaardi ülesehitus Joonis 1 Toetuste veebikaardi vaade Toetuste veebikaardi vaade jaguneb tinglikult kaheks: 1) Statistika valikute osa 2) Kaardiaken Statistika
B120_10 estonian.cdr
 Alati seal, et teid aidata Registreerige oma toode ja otsige abi koduleheküljelt www.philips.com/welcome B120 Beebimonitor Küsimus? Kontakteeruge Philipsiga Eestikeelne kasutusjuhend 2 Valgussensor USB
Alati seal, et teid aidata Registreerige oma toode ja otsige abi koduleheküljelt www.philips.com/welcome B120 Beebimonitor Küsimus? Kontakteeruge Philipsiga Eestikeelne kasutusjuhend 2 Valgussensor USB
VRG 2, VRG 3
 Tehniline andmeleht Sadulventiilid (PN 16) 2-tee ventiil, väliskeermega 3-tee ventiil, väliskeermega Kirjeldus Omadused Mullikindel konstruktsioon Mehhaaniline snepperühendus täiturmootoriga MV(E) 335,
Tehniline andmeleht Sadulventiilid (PN 16) 2-tee ventiil, väliskeermega 3-tee ventiil, väliskeermega Kirjeldus Omadused Mullikindel konstruktsioon Mehhaaniline snepperühendus täiturmootoriga MV(E) 335,
(Estonian) DM-RBCS Edasimüüja juhend MAANTEE MTB Rändamine City Touring/ Comfort Bike URBAN SPORT E-BIKE Kasseti ketiratas CS-HG400-9 CS-HG50-8
 DM-RBCS Edasimüüja juhend MAANTEE MTB Rändamine City Touring/ Comfort Bike URBAN SPORT E-BIKE Kasseti ketiratas CS-HG400-9 CS-HG50-8") (Estonian) DM-RBCS001-02 Edasimüüja juhend MAANTEE MTB Rändamine City Touring/ Comfort Bike URBAN SPORT E-BIKE Kasseti ketiratas CS-HG400-9 CS-HG50-8 SISUKORD OLULINE MÄRKUS... 3 OHUTUSE TAGAMINE... 4
(Estonian) DM-RBCS001-02 Edasimüüja juhend MAANTEE MTB Rändamine City Touring/ Comfort Bike URBAN SPORT E-BIKE Kasseti ketiratas CS-HG400-9 CS-HG50-8 SISUKORD OLULINE MÄRKUS... 3 OHUTUSE TAGAMINE... 4
Väärtusta oma vabadust. Eesti Yale Seifide Kasutusjuhend Mudelid: YSB/200/EB1 YSB/250/EB1 YSB/400/EB1 YLB/200/EB1 YSM/250/EG1 YSM/400/EG1 YSM/520/EG1
 Väärtusta oma vabadust. Eesti Yale Seifide Kasutusjuhend Mudelid: YSB/200/EB1 YSB/250/EB1 YSB/400/EB1 YLB/200/EB1 YSM/250/EG1 YSM/400/EG1 YSM/520/EG1 YLM/200/EG1 Soovitame selle kasutusjuhendi alles hoida.
Väärtusta oma vabadust. Eesti Yale Seifide Kasutusjuhend Mudelid: YSB/200/EB1 YSB/250/EB1 YSB/400/EB1 YLB/200/EB1 YSM/250/EG1 YSM/400/EG1 YSM/520/EG1 YLM/200/EG1 Soovitame selle kasutusjuhendi alles hoida.
HCB_hinnakiri2018_kodukale
 Betooni baashinnakiri Hinnakiri kehtib alates 01.01.2018 Töödeldavus S3 Töödeldavus S4 / m 3 /m 3 km-ga / m 3 /m 3 km-ga C 8/10 73 87 75 89 C 12/15 77 92 79 94 C 16/20 79 94 81 96 C 20/25 82 98 84 100
Betooni baashinnakiri Hinnakiri kehtib alates 01.01.2018 Töödeldavus S3 Töödeldavus S4 / m 3 /m 3 km-ga / m 3 /m 3 km-ga C 8/10 73 87 75 89 C 12/15 77 92 79 94 C 16/20 79 94 81 96 C 20/25 82 98 84 100
Programmi AnimatorDV Simple+ lühike kasutajajuhend
 Programmi AnimatorDV Simple+ esmane kasutusjuhend Programm AnimatorDV Simple+ on mõeldud animatsioonide loomiseks. Tegemist on tasuta tarkvaraga, mis töötab videoseadmetega (videokaamera, veebikaamera).
Programmi AnimatorDV Simple+ esmane kasutusjuhend Programm AnimatorDV Simple+ on mõeldud animatsioonide loomiseks. Tegemist on tasuta tarkvaraga, mis töötab videoseadmetega (videokaamera, veebikaamera).
CPA4164 USB 2.0 kõrgekvaliteediline videoadapter KASUTUSJUHEND 1. PEATÜKK - Ülevaade 1.1 Tutvustus CPA4164 USB 2.0 videoadapter võimaldab teil arvutis
 CPA4164 USB 2.0 kõrgekvaliteediline videoadapter KASUTUSJUHEND 1. PEATÜKK - Ülevaade 1.1 Tutvustus CPA4164 USB 2.0 videoadapter võimaldab teil arvutisse laadida ja redigeerida erinevatest analoogvideo
CPA4164 USB 2.0 kõrgekvaliteediline videoadapter KASUTUSJUHEND 1. PEATÜKK - Ülevaade 1.1 Tutvustus CPA4164 USB 2.0 videoadapter võimaldab teil arvutisse laadida ja redigeerida erinevatest analoogvideo
P9_10 estonian.cdr
 Registreerige oma toode ja saage abi kodulehelt www.philips.com/welcome P9/10 Eestikeelne kasutusjuhend 2 Ühendage P9 kõlar Bluetooth ühenduse kaudu oma Bluetooth seadmega, nagu näiteks ipadiga, iphone'iga,
Registreerige oma toode ja saage abi kodulehelt www.philips.com/welcome P9/10 Eestikeelne kasutusjuhend 2 Ühendage P9 kõlar Bluetooth ühenduse kaudu oma Bluetooth seadmega, nagu näiteks ipadiga, iphone'iga,
normaali
 AS TEEKARU T-2 Tallinn-Tartu-Võru Luhamaa mnt kiirustabloode mõõtetulemused enne ja pärast märgi aktiveerimist. Vahearuanne Tallinn 2 AS TEEKARU LIIKLUSOSAKOND T-2 Tallinn-Tartu-Võru Luhamaa mnt kiirustabloode
AS TEEKARU T-2 Tallinn-Tartu-Võru Luhamaa mnt kiirustabloode mõõtetulemused enne ja pärast märgi aktiveerimist. Vahearuanne Tallinn 2 AS TEEKARU LIIKLUSOSAKOND T-2 Tallinn-Tartu-Võru Luhamaa mnt kiirustabloode
PÄRNU TÄISKASVANUTE GÜMNAASIUM ESITLUSE KOOSTAMISE JUHEND Pärnu 2019
 PÄRNU TÄISKASVANUTE GÜMNAASIUM ESITLUSE KOOSTAMISE JUHEND Pärnu 2019 SISUKORD 1. SLAIDIESITLUS... 3 1.1. Esitlustarkvara... 3 1.2. Slaidiesitluse sisu... 3 1.3. Slaidiesitluse vormistamine... 4 1.3.1 Slaidid...
PÄRNU TÄISKASVANUTE GÜMNAASIUM ESITLUSE KOOSTAMISE JUHEND Pärnu 2019 SISUKORD 1. SLAIDIESITLUS... 3 1.1. Esitlustarkvara... 3 1.2. Slaidiesitluse sisu... 3 1.3. Slaidiesitluse vormistamine... 4 1.3.1 Slaidid...
Mida räägivad logid programmeerimisülesande lahendamise kohta? Heidi Meier
 Mida räägivad logid programmeerimisülesande lahendamise kohta? Heidi Meier 09.02.2019 Miks on ülesannete lahendamise käigu kohta info kogumine oluline? Üha rohkem erinevas eas inimesi õpib programmeerimist.
Mida räägivad logid programmeerimisülesande lahendamise kohta? Heidi Meier 09.02.2019 Miks on ülesannete lahendamise käigu kohta info kogumine oluline? Üha rohkem erinevas eas inimesi õpib programmeerimist.
Estonian_TBW-106UB(V1).cdr
.cdr") Lühike paigaldusjuhend TBW-106UB H/W: V1 Sisukord... 1 1. Enne alustamist... 1 2. Kuidas paigaldada... 3. Bluetooth adapteriseadistamine... 2 5 Tõrkeotsing... 7 Version 02.17.2009 1. Enne alustamist Pakendi
Lühike paigaldusjuhend TBW-106UB H/W: V1 Sisukord... 1 1. Enne alustamist... 1 2. Kuidas paigaldada... 3. Bluetooth adapteriseadistamine... 2 5 Tõrkeotsing... 7 Version 02.17.2009 1. Enne alustamist Pakendi
Tartu Ülikool
 Tartu Ülikool Code coverage Referaat Koostaja: Rando Mihkelsaar Tartu 2005 Sissejuhatus Inglise keelne väljend Code coverage tähendab eesti keeles otse tõlgituna koodi kaetust. Lahti seletatuna näitab
Tartu Ülikool Code coverage Referaat Koostaja: Rando Mihkelsaar Tartu 2005 Sissejuhatus Inglise keelne väljend Code coverage tähendab eesti keeles otse tõlgituna koodi kaetust. Lahti seletatuna näitab
TTÜ Robotiklubi
 Robot Igaühele Robootika ja elektroonika põhitõed Programmeerimine, Arduino Roboti disain ja ehituse algus Roboti ehitus ja jootmine Robotite programmeerimine Ülesande lahendamine Lõppvõistlus Sissejuhatus
Robot Igaühele Robootika ja elektroonika põhitõed Programmeerimine, Arduino Roboti disain ja ehituse algus Roboti ehitus ja jootmine Robotite programmeerimine Ülesande lahendamine Lõppvõistlus Sissejuhatus
VANASÕIDUKIKS TUNNUSTAMISE AKT Nr 62 Sõiduki olulised andmed Sõiduki mark Husqvarna Vanasõiduki klass Mudel ja modifikatsioon 282E Silverpil Värvus hõ
 VANASÕIDUKIKS TUNNUSTAMISE AKT Nr 62 Sõiduki olulised andmed Sõiduki mark Husqvarna Vanasõiduki klass Mudel ja modifikatsioon 282E Silverpil Värvus hõbehall Tehasetähis (VINkood) Valmistajamaa Rootsi Esmane
VANASÕIDUKIKS TUNNUSTAMISE AKT Nr 62 Sõiduki olulised andmed Sõiduki mark Husqvarna Vanasõiduki klass Mudel ja modifikatsioon 282E Silverpil Värvus hõbehall Tehasetähis (VINkood) Valmistajamaa Rootsi Esmane
Võistlusülesanne Vastutuulelaev Finaal
 Võistlusülesanne Vastutuulelaev Finaal CADrina 2016 võistlusülesannete näol on tegemist tekst-pilt ülesannetega, milliste lahendamiseks ei piisa ainult jooniste ülevaatamisest, vaid lisaks piltidele tuleb
Võistlusülesanne Vastutuulelaev Finaal CADrina 2016 võistlusülesannete näol on tegemist tekst-pilt ülesannetega, milliste lahendamiseks ei piisa ainult jooniste ülevaatamisest, vaid lisaks piltidele tuleb
Manuals Generator
 Sooritage asendamine järgnevas järjekorras: 1 Vahetage vedrud paarikaupa. Pingutage seisupiduri hooba. 2 3 Asetage tõkiskingad tagumiste rataste taha. Lõdvendage ratta kinnituspolte. 4 5 Tõstke esimest
Sooritage asendamine järgnevas järjekorras: 1 Vahetage vedrud paarikaupa. Pingutage seisupiduri hooba. 2 3 Asetage tõkiskingad tagumiste rataste taha. Lõdvendage ratta kinnituspolte. 4 5 Tõstke esimest
Kuidas vahetada esimesi suspensiooni vedrusid autol VOLKSWAGEN TOURAN 1
 Sooritage asendamine järgnevas järjekorras: 1 Vahetage Volkswagen Touran 1 vedrud paarikaupa. 2 Pingutage seisupiduri hooba. 3 Asetage tõkiskingad tagumiste rataste taha. Lõdvendage ratta kinnituspolte.
Sooritage asendamine järgnevas järjekorras: 1 Vahetage Volkswagen Touran 1 vedrud paarikaupa. 2 Pingutage seisupiduri hooba. 3 Asetage tõkiskingad tagumiste rataste taha. Lõdvendage ratta kinnituspolte.
Microsoft Word - XTOP026.doc
 XTOP026 Enne seadme kasutamist lugege kasutusjuhend hoolikalt läbi ja järgige kõiki juhiseid. Hoidke juhend hilisemaks vajaduseks alles. MOOTORRATTA TÕSTUK Kasutusjuhend OLULINE! EST LUGEGE NEED JUHISED
XTOP026 Enne seadme kasutamist lugege kasutusjuhend hoolikalt läbi ja järgige kõiki juhiseid. Hoidke juhend hilisemaks vajaduseks alles. MOOTORRATTA TÕSTUK Kasutusjuhend OLULINE! EST LUGEGE NEED JUHISED
28 29
 28 29 CARGO TIPPER KÕRGE VÕIMEKUS MADAL RASKUSKESE Iga BJT haagis on konstrueeritud ühte eesmärki silmas pidades - pakkuda teile parimat. Haagised on valmistatud vastavalt klientide tagasisidele, lähtudes
28 29 CARGO TIPPER KÕRGE VÕIMEKUS MADAL RASKUSKESE Iga BJT haagis on konstrueeritud ühte eesmärki silmas pidades - pakkuda teile parimat. Haagised on valmistatud vastavalt klientide tagasisidele, lähtudes
Microsoft Word - DB2_TECEfloor Raumthermostat Analog_EN_est
 1 TECEfloori toatermostaat Analog (RT-A ja RT-A HK) TECEfloori toatermostaat Analog on kvaliteetne toatermostaat ruumi temperatuuri registreerimiseks ja muuutmiseks ning pakub maksimaalset kasutusmugavust.
1 TECEfloori toatermostaat Analog (RT-A ja RT-A HK) TECEfloori toatermostaat Analog on kvaliteetne toatermostaat ruumi temperatuuri registreerimiseks ja muuutmiseks ning pakub maksimaalset kasutusmugavust.
VRB 2, VRB 3
 Tehniline andmeleht Sadulventiilid (PN 6) VR - tee ventiil, sise- ja väliskeere 3-tee ventiil, sise- ja väliskeere Kirjeldus Omadused Mullikindel konstruktsioon Mehaaniline snepperühendus täiturmootoriga
Tehniline andmeleht Sadulventiilid (PN 6) VR - tee ventiil, sise- ja väliskeere 3-tee ventiil, sise- ja väliskeere Kirjeldus Omadused Mullikindel konstruktsioon Mehaaniline snepperühendus täiturmootoriga
Juhend nutiterminali seadistamiseks ja kaardimaksete vastuvõtmiseks Ingenico Link/2500 ja icmp
 Juhend nutiterminali seadistamiseks ja kaardimaksete vastuvõtmiseks Ingenico Link/2500 ja icmp Terminali seadistamine Lülita telefonis või tahvelarvutis (edaspidi telefonis) sisse Bluetooth. (1) 1 1 Mudel
Juhend nutiterminali seadistamiseks ja kaardimaksete vastuvõtmiseks Ingenico Link/2500 ja icmp Terminali seadistamine Lülita telefonis või tahvelarvutis (edaspidi telefonis) sisse Bluetooth. (1) 1 1 Mudel
Remote Desktop Redirected Printer Doc
 VI OSA, 10. klass füüsika Ühtlaselt muutuv liikumine ja kiirendus Ühtlaselt muutuv liikumine on mitteühtlase liikumise eriliik. Ühtlaselt muutuv liikumine on selline liikumine, mille puhul keha kiirus
VI OSA, 10. klass füüsika Ühtlaselt muutuv liikumine ja kiirendus Ühtlaselt muutuv liikumine on mitteühtlase liikumise eriliik. Ühtlaselt muutuv liikumine on selline liikumine, mille puhul keha kiirus
G TECTA 4G mitme gaasi detektor EE Lühijuhend
 G TECTA 4G mitme gaasi detektor Lühijuhend 2 Sisukord Ohutus- ning ettevaatusabinõud 2 Karbi sisu 3 Toote ülevaade 3 Toote omadused 3 Akude kontrollimine 4 Sisselülitamine 4 G-TECTA 4G käivitusprotsess
G TECTA 4G mitme gaasi detektor Lühijuhend 2 Sisukord Ohutus- ning ettevaatusabinõud 2 Karbi sisu 3 Toote ülevaade 3 Toote omadused 3 Akude kontrollimine 4 Sisselülitamine 4 G-TECTA 4G käivitusprotsess
Document number:
 WNR Kiirpaigaldusjuhend Lisateavet, juhised ja uuendused saab leida internetist aadressil http://www.a-link.com Kiirpaigaldusjuhend Komplekt sisaldab: - WNR repiiter - Paigaldusjuhend Ühendused / Ports:
WNR Kiirpaigaldusjuhend Lisateavet, juhised ja uuendused saab leida internetist aadressil http://www.a-link.com Kiirpaigaldusjuhend Komplekt sisaldab: - WNR repiiter - Paigaldusjuhend Ühendused / Ports:
Antennide vastastikune takistus
 Antennide vastastikune takistus Eelmises peatükis leidsime antenni kiirgustakistuse arvestamata antenni lähedal teisi objekte. Teised objektid, näiteks teised antennielemendid, võivad aga mõjutada antenni
Antennide vastastikune takistus Eelmises peatükis leidsime antenni kiirgustakistuse arvestamata antenni lähedal teisi objekte. Teised objektid, näiteks teised antennielemendid, võivad aga mõjutada antenni
Caterpillar Inc. 100 NE Adams Street, Peoria, IL USA Meedianumber U9NE8460 Tegevusdokument Lisateave GRADE süsteemi komponentide nõuetele vastav
 Tegevusdokument Lisateave GRADE süsteemi komponentide nõuetele vastavuse teave 1 Sisukord lk Ohutusmärgid ja -sildid... 3 Ohutusteated... 4 Muud sildid... 5 Üldine ohuteave... 6 Edastamine... 6 Sissejuhatus...
Tegevusdokument Lisateave GRADE süsteemi komponentide nõuetele vastavuse teave 1 Sisukord lk Ohutusmärgid ja -sildid... 3 Ohutusteated... 4 Muud sildid... 5 Üldine ohuteave... 6 Edastamine... 6 Sissejuhatus...
Operatsioonisüsteemi ülesanded
 Praktikum 2 OPERATSIOONISÜSTEEMIDE MASSPAIGALDUS Operatsioonisüsteemide masspaigaldus Suure arvu arvutisüsteemide korral ei ole mõistlik operatsioonisüsteeme paigaldada manuaalselt. Operatsioonisüsteemide
Praktikum 2 OPERATSIOONISÜSTEEMIDE MASSPAIGALDUS Operatsioonisüsteemide masspaigaldus Suure arvu arvutisüsteemide korral ei ole mõistlik operatsioonisüsteeme paigaldada manuaalselt. Operatsioonisüsteemide
efo03v2pkl.dvi
 Eesti koolinoorte 50. füüsikaolümpiaad 1. veebruar 2003. a. Piirkondlik voor Põhikooli ülesannete lahendused NB! Käesoleval lahendustelehel on toodud iga ülesande üks õige lahenduskäik. Kõik alternatiivsed
Eesti koolinoorte 50. füüsikaolümpiaad 1. veebruar 2003. a. Piirkondlik voor Põhikooli ülesannete lahendused NB! Käesoleval lahendustelehel on toodud iga ülesande üks õige lahenduskäik. Kõik alternatiivsed
BIOPUHASTI M-BOŠ BOX KASUTUS- JA PAIGALDUSJUHEND 2017
 BIOPUHASTI M-BOŠ BOX KASUTUS- JA PAIGALDUSJUHEND 2017 Biopuhasti tööprotsessi kirjeldus M-Bos biopuhastit kasutatakse puhastamaks reovett eramajades, koolides, hotellides ja teistes reovee puhastamist
BIOPUHASTI M-BOŠ BOX KASUTUS- JA PAIGALDUSJUHEND 2017 Biopuhasti tööprotsessi kirjeldus M-Bos biopuhastit kasutatakse puhastamaks reovett eramajades, koolides, hotellides ja teistes reovee puhastamist
DE_loeng5
 Digitaalelektroonika V loeng loogikalülitused KMOP transistoridega meeldetuletus loogikalülitused TTL baasil baaslülitus inverteri tunnusjooned ja hilistumine LS lülitus kolme olekuga TTL ja avatud kollektoriga
Digitaalelektroonika V loeng loogikalülitused KMOP transistoridega meeldetuletus loogikalülitused TTL baasil baaslülitus inverteri tunnusjooned ja hilistumine LS lülitus kolme olekuga TTL ja avatud kollektoriga
Microsoft Word - ref - Romet Piho - Tutorial D.doc
 Tartu Ülikool Andmetöötluskeel "Tutorial D" realisatsiooni "Rel" põhjal Referaat aines Tarkvaratehnika Romet Piho Informaatika 2 Juhendaja Indrek Sander Tartu 2005 Sissejuhatus Tänapäeval on niinimetatud
Tartu Ülikool Andmetöötluskeel "Tutorial D" realisatsiooni "Rel" põhjal Referaat aines Tarkvaratehnika Romet Piho Informaatika 2 Juhendaja Indrek Sander Tartu 2005 Sissejuhatus Tänapäeval on niinimetatud
Microsoft Word - QOS_2008_Tallinn_OK.doc
 GSM mobiiltelefoniteenuse kvaliteet Tallinnas, juuni 2008 Sideteenuste osakond 2008 Kvaliteedist üldiselt GSM mobiiltelefonivõrgus saab mõõta kümneid erinevaid tehnilisi parameetreid ja nende kaudu võrku
GSM mobiiltelefoniteenuse kvaliteet Tallinnas, juuni 2008 Sideteenuste osakond 2008 Kvaliteedist üldiselt GSM mobiiltelefonivõrgus saab mõõta kümneid erinevaid tehnilisi parameetreid ja nende kaudu võrku
Õppematerjalide esitamine Moodle is (alustajatele) seminar sarjas Lõunatund e-õppega 12. septembril 2017 õppedisainerid Ly Sõõrd (LT valdkond) ja Dian
 seminar sarjas Lõunatund e-õppega 12. septembril 2017 õppedisainerid Ly Sõõrd (LT valdkond) ja Dian") Õppematerjalide esitamine Moodle is (alustajatele) seminar sarjas Lõunatund e-õppega 12. septembril 2017 õppedisainerid Ly Sõõrd (LT valdkond) ja Diana Lõvi (SV valdkond) Järgmised e-lõunad: 10. oktoober
Õppematerjalide esitamine Moodle is (alustajatele) seminar sarjas Lõunatund e-õppega 12. septembril 2017 õppedisainerid Ly Sõõrd (LT valdkond) ja Diana Lõvi (SV valdkond) Järgmised e-lõunad: 10. oktoober
Tootmine_ja_tootlikkus
 TOOTMINE JA TOOTLIKKUS Juhan Lehepuu Leiame vastused küsimustele: Mis on sisemajanduse koguprodukt ja kuidas seda mõõdetakse? Kuidas mõjutavad sisemajanduse koguprodukti muutused elatustaset? Miks sõltub
TOOTMINE JA TOOTLIKKUS Juhan Lehepuu Leiame vastused küsimustele: Mis on sisemajanduse koguprodukt ja kuidas seda mõõdetakse? Kuidas mõjutavad sisemajanduse koguprodukti muutused elatustaset? Miks sõltub
Slide 1
 ERAÜ XVII TALVEPÄEV 2015 Uue põlvkonna LDMOS transistorvõimendid 14.veebruar 2015 Mart Tagasaar, ES2NJ Sissejuhatus Alates 2010.aastast on turule ilmunud uue põlvkonna LDMOS transistorid võimsusega 600-1400W,
ERAÜ XVII TALVEPÄEV 2015 Uue põlvkonna LDMOS transistorvõimendid 14.veebruar 2015 Mart Tagasaar, ES2NJ Sissejuhatus Alates 2010.aastast on turule ilmunud uue põlvkonna LDMOS transistorid võimsusega 600-1400W,
P-PIPE Basic universaalne survetihend Üks kõigile rakendustele. Eelistest lühidalt nüüd saadaval nitriilkummist (NBR) ja roostevabast terasest S316 ta
 ja roostevabast terasest S316 ta") universaalne survetihend Üks kõigile rakendustele. Eelistest lühidalt nüüd saadaval nitriilkummist (NBR) ja roostevabast terasest S316 tavaliselt lahtikäiv visuaalne pöördemomendi kontrollimine universaalselt
universaalne survetihend Üks kõigile rakendustele. Eelistest lühidalt nüüd saadaval nitriilkummist (NBR) ja roostevabast terasest S316 tavaliselt lahtikäiv visuaalne pöördemomendi kontrollimine universaalselt
Hoia oma arvuti turvaline ja kiire 1.Leia start nupust alustades Juhtpaneel 2.Juhtpaneeli aadressiribalt leia Kõik juhtpaneeli üksused 3.Avanenud tööa
 Hoia oma arvuti turvaline ja kiire 1.Leia start nupust alustades Juhtpaneel 2.Juhtpaneeli aadressiribalt leia Kõik juhtpaneeli üksused 3.Avanenud tööaknas leia Windows Update 4.Lase arvutil kontrollida
Hoia oma arvuti turvaline ja kiire 1.Leia start nupust alustades Juhtpaneel 2.Juhtpaneeli aadressiribalt leia Kõik juhtpaneeli üksused 3.Avanenud tööaknas leia Windows Update 4.Lase arvutil kontrollida
Praks 1
 Biomeetria praks 3 Illustreeritud (mittetäielik) tööjuhend Eeltöö 1. Avage MS Excel is oma kursuse ankeedivastuseid sisaldav andmestik, 2. lisage uus tööleht, 3. nimetage see ümber leheküljeks Praks3 ja
Biomeetria praks 3 Illustreeritud (mittetäielik) tööjuhend Eeltöö 1. Avage MS Excel is oma kursuse ankeedivastuseid sisaldav andmestik, 2. lisage uus tööleht, 3. nimetage see ümber leheküljeks Praks3 ja
DJI GOGGLES Kiirjuhend V1.0
 DJI GOGGLES Kiirjuhend V1.0 DJI Goggles DJI Goggles on mugavad prillid, mis on disainitud mugavaks FPV lendamiseks DJI toodetega. Nad loovad ultra-kõrge kvaliteediga pildi, minimaalse viivitusega pikamaa
DJI GOGGLES Kiirjuhend V1.0 DJI Goggles DJI Goggles on mugavad prillid, mis on disainitud mugavaks FPV lendamiseks DJI toodetega. Nad loovad ultra-kõrge kvaliteediga pildi, minimaalse viivitusega pikamaa
Microsoft Word - TM70_SP-MG_kasutusjuhend.docx
 TM70 Touch-i kasutusjuhend Süsteemid: Magellan ja Spectra SP Põhiekraan Kuupäev/kellaaeg Välis-/sisetemperatuur Süsteemi olek Tsoonid Menüü Info OneScreen Monitoring SpotOn Locator Slaidiesitus Paanika-häire
TM70 Touch-i kasutusjuhend Süsteemid: Magellan ja Spectra SP Põhiekraan Kuupäev/kellaaeg Välis-/sisetemperatuur Süsteemi olek Tsoonid Menüü Info OneScreen Monitoring SpotOn Locator Slaidiesitus Paanika-häire
Keemia koolieksami näidistöö
 PÕLVA ÜHISGÜMNAASIUMI KEEMIA KOOLIEKSAM Keemia koolieksami läbiviimise eesmärgiks on kontrollida gümnaasiumilõpetaja keemiaalaste teadmiste ja oskuste taset kehtiva ainekava ulatuses järgmistes valdkondades:
PÕLVA ÜHISGÜMNAASIUMI KEEMIA KOOLIEKSAM Keemia koolieksami läbiviimise eesmärgiks on kontrollida gümnaasiumilõpetaja keemiaalaste teadmiste ja oskuste taset kehtiva ainekava ulatuses järgmistes valdkondades:
RVT_ DC-Arctic, 1, en_GB
 Kasutusjuhend RVT 64 DC, RVT 354 DC, RVT 54 DC, RVT 684 DC Kasutusjuhend Üldteave Siseseadet saab hõlpsalt kasutada infrapunakaugjuhtimispuldiga. Siseseade annab õigest andmeedastusest teada helisignaaliga.
Kasutusjuhend RVT 64 DC, RVT 354 DC, RVT 54 DC, RVT 684 DC Kasutusjuhend Üldteave Siseseadet saab hõlpsalt kasutada infrapunakaugjuhtimispuldiga. Siseseade annab õigest andmeedastusest teada helisignaaliga.
DELTA kihtplastikuga kaetud kasvuhoone 2,2 м 2,5 м 2,2 м Tehniline leht lk. 2-5 Paigaldusjuhend lk ET
 DELTA kihtplastikuga kaetud kasvuhoone 2,2 м 2,5 м 2,2 м Tehniline leht lk. 2-5 Paigaldusjuhend lk. 6-20 ET TEHNILINE LEHT/KASVUHOONE «DELTA»! Kasvuhoone paigaldamisel ja kasutamisel pidage rangelt kinni
DELTA kihtplastikuga kaetud kasvuhoone 2,2 м 2,5 м 2,2 м Tehniline leht lk. 2-5 Paigaldusjuhend lk. 6-20 ET TEHNILINE LEHT/KASVUHOONE «DELTA»! Kasvuhoone paigaldamisel ja kasutamisel pidage rangelt kinni
laoriiulida1.ai
 LAORIIULID LAORIIULID KAUBAALUSTE RIIULID , arhiiviriiulid - Lk.3 Liikuvad arhiiviriiulid - Lk.5 Laiad laoriiulid - Lk.11 Kaubaaluste riiulid - Lk.13 Drive-in riiulid - Lk.14 Konsool- ehk harudega riiulid
LAORIIULID LAORIIULID KAUBAALUSTE RIIULID , arhiiviriiulid - Lk.3 Liikuvad arhiiviriiulid - Lk.5 Laiad laoriiulid - Lk.11 Kaubaaluste riiulid - Lk.13 Drive-in riiulid - Lk.14 Konsool- ehk harudega riiulid
Microsoft Word - Qualitätskriterien 011 Frami+Zubehör.doc
 10/2002 Kvaliteedi kriteeriumid Doka rendiraketisele Doka seinapaneel Frami ja lisatarvikud 1 Sissejuhatus Järgnevad kvaliteedi kriteeriumid on Doka rendimaterjali väljastamise ja tagastamise aluseks.
10/2002 Kvaliteedi kriteeriumid Doka rendiraketisele Doka seinapaneel Frami ja lisatarvikud 1 Sissejuhatus Järgnevad kvaliteedi kriteeriumid on Doka rendimaterjali väljastamise ja tagastamise aluseks.
HD 13/12-4 ST Ruumisäästlikud, statsionaarsed kõrgsurvepesurid Kärcherilt, millel on kuni 6 varustuspunkti, mida saab vastavalt vajadusele individuaal
 Ruumisäästlikud, statsionaarsed kõrgsurvepesurid Kärcherilt, millel on kuni 6 varustuspunkti, mida saab vastavalt vajadusele individuaalselt konfigureerida, ning mis on äärmiselt kulumiskindlad. 1 2 3
Ruumisäästlikud, statsionaarsed kõrgsurvepesurid Kärcherilt, millel on kuni 6 varustuspunkti, mida saab vastavalt vajadusele individuaalselt konfigureerida, ning mis on äärmiselt kulumiskindlad. 1 2 3
Microsoft Word - Suure thermori pass2.doc
 PAIGALDAMINE KASUTAMINE HOOLDUS SUUREMAHULISED 500-3000 L VEEBOILERID Need on sukel-ja keraamilise küttekehaga elektrilised veesoojendid. Võimalikud on variandid kus täiendavalt küttekehale on ka kesküttesüsteemiga
PAIGALDAMINE KASUTAMINE HOOLDUS SUUREMAHULISED 500-3000 L VEEBOILERID Need on sukel-ja keraamilise küttekehaga elektrilised veesoojendid. Võimalikud on variandid kus täiendavalt küttekehale on ka kesküttesüsteemiga
Microsoft Word - 56ylesanded1415_lõppvoor
 1. 1) Iga tärnike tuleb asendada ühe numbriga nii, et tehe oleks õige. (Kolmekohaline arv on korrutatud ühekohalise arvuga ja tulemuseks on neljakohaline arv.) * * 3 * = 2 * 1 5 Kas on õige, et nii on
1. 1) Iga tärnike tuleb asendada ühe numbriga nii, et tehe oleks õige. (Kolmekohaline arv on korrutatud ühekohalise arvuga ja tulemuseks on neljakohaline arv.) * * 3 * = 2 * 1 5 Kas on õige, et nii on
Microsoft Word - P6_metsamasinate juhtimine ja seadistamine FOP kutsekeskharidus statsionaarne
 MOODULI RAKENDUSKAVA Sihtrühm: forvarderioperaatori 4. taseme kutsekeskhariduse taotlejad Õppevorm: statsionaarne Moodul nr 6 Mooduli vastutaja: Mooduli õpetajad: Metsamasinate juhtimine ja seadistamine
MOODULI RAKENDUSKAVA Sihtrühm: forvarderioperaatori 4. taseme kutsekeskhariduse taotlejad Õppevorm: statsionaarne Moodul nr 6 Mooduli vastutaja: Mooduli õpetajad: Metsamasinate juhtimine ja seadistamine
Microsoft Word - HOTSEC kasutusjuhend v1.900.docx
 HOTSEC Tarkvara kasutusjuhend v. 1.9 1 Sisukord Käivitamine:... 3 Programmi kasutamine... 4 Kasutajate lisamine ja eemaldamine:... 6 Jooksev logi:... 9 Häired:... 9 2 HOTSEC põhioperatsioonide kirjeldus
HOTSEC Tarkvara kasutusjuhend v. 1.9 1 Sisukord Käivitamine:... 3 Programmi kasutamine... 4 Kasutajate lisamine ja eemaldamine:... 6 Jooksev logi:... 9 Häired:... 9 2 HOTSEC põhioperatsioonide kirjeldus
QUANTUM SPIN-OFF - Experiment UNIVERSITEIT ANTWERPEN
 1 Kvantfüüsika Tillukeste asjade füüsika, millel on hiiglaslikud rakendusvõimalused 3. osa: PRAKTILISED TEGEVUSED Elektronide difraktsioon Projekti Quantum Spin-Off rahastab Euroopa Liit programmi LLP
1 Kvantfüüsika Tillukeste asjade füüsika, millel on hiiglaslikud rakendusvõimalused 3. osa: PRAKTILISED TEGEVUSED Elektronide difraktsioon Projekti Quantum Spin-Off rahastab Euroopa Liit programmi LLP
EUROOPA KOMISJON Brüssel, XXX [ ](2013) XXX draft KOMISJONI DIREKTIIV / /EL, XXX, millega muudetakse Euroopa Parlamendi ja nõukogu direktiivi 2000/25/
 XXX draft KOMISJONI DIREKTIIV / /EL, XXX, millega muudetakse Euroopa Parlamendi ja nõukogu direktiivi 2000/25/](/thumbs/101/148130357.jpg "EUROOPA KOMISJON Brüssel, XXX [ ](2013) XXX draft KOMISJONI DIREKTIIV / /EL, XXX, millega muudetakse Euroopa Parlamendi ja nõukogu direktiivi 2000/25/") EUROOPA KOMISJON Brüssel, XXX [ ](2013) XXX draft KOMISJONI DIREKTIIV / /EL, XXX, millega muudetakse Euroopa Parlamendi ja nõukogu direktiivi 2000/25/EÜ (põllumajandus- ja metsatraktorite mootoritest paisatavate
EUROOPA KOMISJON Brüssel, XXX [ ](2013) XXX draft KOMISJONI DIREKTIIV / /EL, XXX, millega muudetakse Euroopa Parlamendi ja nõukogu direktiivi 2000/25/EÜ (põllumajandus- ja metsatraktorite mootoritest paisatavate
A9RE06B.tmp
 Head Quarter accelerate the future Õlivabad kolbkompressorid Nüüd ka 100%-se koormatavusega www.gentilincompressors.com Professionaalsed õlivabad kompressorid RUUMI KOKKUHOID Algselt väljavenitatud vertikaalne
Head Quarter accelerate the future Õlivabad kolbkompressorid Nüüd ka 100%-se koormatavusega www.gentilincompressors.com Professionaalsed õlivabad kompressorid RUUMI KOKKUHOID Algselt väljavenitatud vertikaalne
G aiasoft Programmi VERP ja Omniva Arvekeskuse liidese häälestamine ja arvete saatmine-lugemine VERP 6.3 ja VERP 6.3E Versioon ja hilisemad K
 Programmi VERP ja Omniva Arvekeskuse liidese häälestamine ja arvete saatmine-lugemine VERP 6.3 ja VERP 6.3E Versioon 6.3.1.51 ja hilisemad Kasutaja juhend 2016 Sisukord 1. Sissejuhatus...3 2. Liidese häälestus...3
Programmi VERP ja Omniva Arvekeskuse liidese häälestamine ja arvete saatmine-lugemine VERP 6.3 ja VERP 6.3E Versioon 6.3.1.51 ja hilisemad Kasutaja juhend 2016 Sisukord 1. Sissejuhatus...3 2. Liidese häälestus...3
4. Kuumaveeboilerid ja akumulatsioonipaagid STORACELL Kuumaveeboilerid STORACELL ST 120-2E, ST 160-2E...88 STORACELL SKB 160, STORACELL SK 12
 4. Kuumaveeboilerid ja akumulatsioonipaagid STORACELL Kuumaveeboilerid STORACELL ST 120-2E, ST 160-2E...88 STORACELL SKB 160, 200...89 STORACELL SK 120-5ZB, SK 160-5ZB, SK 200-5ZB...90 STORACELL SK 300-5ZB,
4. Kuumaveeboilerid ja akumulatsioonipaagid STORACELL Kuumaveeboilerid STORACELL ST 120-2E, ST 160-2E...88 STORACELL SKB 160, 200...89 STORACELL SK 120-5ZB, SK 160-5ZB, SK 200-5ZB...90 STORACELL SK 300-5ZB,
JABRA STYLE Kasutusjuhend jabra.com/style
 Kasutusjuhend jabra.com/style SISUKORD 1. TERE TULEMAST... 3 2. PEAKOMPLEKT... 4 3. KANDMINE... 5 3.1 KUULARIKATETE VAHETAMINE 4. AKU LAADIMINE... 6 5. ÜHENDAMINE... 7 5.1 BLUETOOTH SEADMEGA ÜHENDAMINE
Kasutusjuhend jabra.com/style SISUKORD 1. TERE TULEMAST... 3 2. PEAKOMPLEKT... 4 3. KANDMINE... 5 3.1 KUULARIKATETE VAHETAMINE 4. AKU LAADIMINE... 6 5. ÜHENDAMINE... 7 5.1 BLUETOOTH SEADMEGA ÜHENDAMINE
Microsoft Word - TallinnLV_lihtsustatud_manual_asutuse_juhataja_ doc
 Tallinna Linnavalitsuse sõnumisaatja kasutusjuhend asutuse juhatajale Sisukord 1. Süsteemi sisenemine...2 2. Parooli lisamine ja vahetamine...2 3. Ametnike lisamine ametiasutuse juurde...2 4. Saatjanimede
Tallinna Linnavalitsuse sõnumisaatja kasutusjuhend asutuse juhatajale Sisukord 1. Süsteemi sisenemine...2 2. Parooli lisamine ja vahetamine...2 3. Ametnike lisamine ametiasutuse juurde...2 4. Saatjanimede
Microsoft Word - Raudhobu eestikeelne tootekataloog.doc
 RAUDHOBU Produktinformation Tootekataloog 2008 Utgåva 1 Nr. 2 2008 1 IH 2055 Std. 5,5 Hj. Art. Nr. 968 74 35-5,5 hj võimsusega Honda 4 takti mootor. Juhtimine käepidemelt käepidemel gaas ja pidur. Edasi
RAUDHOBU Produktinformation Tootekataloog 2008 Utgåva 1 Nr. 2 2008 1 IH 2055 Std. 5,5 Hj. Art. Nr. 968 74 35-5,5 hj võimsusega Honda 4 takti mootor. Juhtimine käepidemelt käepidemel gaas ja pidur. Edasi
FRESENIUS ÕPPEKESKUS KIIRJUHEND
 FRESENIUS ÕPPEKESKUS KIIRJUHEND SISUKORD 1. Kuidas saan Freseniuse õppekeskuksesse? 03 2. Kuidas sisse logida? 04 3. Mida teha, kui ma ei mäleta oma parooli? 05 4. Mida leian kodulehelt pärast sisselogimist?
FRESENIUS ÕPPEKESKUS KIIRJUHEND SISUKORD 1. Kuidas saan Freseniuse õppekeskuksesse? 03 2. Kuidas sisse logida? 04 3. Mida teha, kui ma ei mäleta oma parooli? 05 4. Mida leian kodulehelt pärast sisselogimist?
Microsoft Word - HEOS 1 kasutusjuhend EST.docx
 HEOS 1 Seadistamise kiirjuhend http://www.denon.ee/?op=body&id=169 http://www.tophifi.ee/ https://www.facebook.com/tophifi.ee ENNE, KUI ALUSTATE Veenduge, et kõik alljärgnev on töökorras: 1. SAMM: LAHTIPAKKIMINE
HEOS 1 Seadistamise kiirjuhend http://www.denon.ee/?op=body&id=169 http://www.tophifi.ee/ https://www.facebook.com/tophifi.ee ENNE, KUI ALUSTATE Veenduge, et kõik alljärgnev on töökorras: 1. SAMM: LAHTIPAKKIMINE
Microsoft Word - requirements.doc
 Dokumendi ajalugu: Versioon Kuupäev Tegevus Autor 1.0 04.03.2008 Dokumendi loomine Madis Abel 1.1 09.03.2008 Kasutuslugude loomine Madis Abel 1.2 12.03.2008 Kasutuslugude täiendused Andres Kalle 1.3 13.03.2008
Dokumendi ajalugu: Versioon Kuupäev Tegevus Autor 1.0 04.03.2008 Dokumendi loomine Madis Abel 1.1 09.03.2008 Kasutuslugude loomine Madis Abel 1.2 12.03.2008 Kasutuslugude täiendused Andres Kalle 1.3 13.03.2008
Elisa Ring Elisa Ringi mobiilirakendus Versioon
 Elisa Ring Elisa Ringi mobiilirakendus Versioon 1.0.85 15.01.2019 1 Elisa Ring... 1 1. Ülevaade... 3 1.1. Kirjeldus... 3 1.2. Tehnilised tingimused... 3 1.3. Kasutuselevõtt ja sisselogimine... 3 2. Rakenduse
Elisa Ring Elisa Ringi mobiilirakendus Versioon 1.0.85 15.01.2019 1 Elisa Ring... 1 1. Ülevaade... 3 1.1. Kirjeldus... 3 1.2. Tehnilised tingimused... 3 1.3. Kasutuselevõtt ja sisselogimine... 3 2. Rakenduse
MAHUTITE HINNAKIRI 2STORE TRANSPORDIMAHUTID (mahutitel on ADR luba ja CE sertifikaat) 01-FUEL 01-FUEL12 02-POWER 2STORE 420L HDPE mahuti diiselkütuste
 01-FUEL 01-FUEL12 02-POWER 2STORE 420L HDPE mahuti diiselkütuste") 2STORE TRANSPORDIMAHUTID (mahutitel on ADR luba ja CE sertifikaat) 01-FUEL 01-FUEL12 02-POWER 2STORE 420L HDPE mahuti diiselkütustele ja õlidele mis on mõeldud masinatele ja agregaatidele millel on oma
2STORE TRANSPORDIMAHUTID (mahutitel on ADR luba ja CE sertifikaat) 01-FUEL 01-FUEL12 02-POWER 2STORE 420L HDPE mahuti diiselkütustele ja õlidele mis on mõeldud masinatele ja agregaatidele millel on oma
PRESENTATION HEADER IN GREY CAPITALS Subheader in orange Presented by Date Columbus is a part of the registered trademark Columbus IT
 PRESENTATION HEADER IN GREY CAPITALS Subheader in orange Presented by Date Columbus is a part of the registered trademark Columbus IT Täisautomatiseeritud ostujuhtimise lahenduse loomine Selveri näitel
PRESENTATION HEADER IN GREY CAPITALS Subheader in orange Presented by Date Columbus is a part of the registered trademark Columbus IT Täisautomatiseeritud ostujuhtimise lahenduse loomine Selveri näitel
Tarvikud _ Puhurid ja vaakumpumbad INW külgkanaliga Air and Vacuum Components in-eco.co.ee
 Tarvikud _ Puhurid ja vaakumpumbad INW külgkanaliga Air and Vacuum Components in-eco.co.ee IN-ECO, spol. s r.o. Radlinského 13 T +421 44 4304662 F +421 44 4304663 E info@in-eco.sk Õhufiltrid integreeritud
Tarvikud _ Puhurid ja vaakumpumbad INW külgkanaliga Air and Vacuum Components in-eco.co.ee IN-ECO, spol. s r.o. Radlinského 13 T +421 44 4304662 F +421 44 4304663 E info@in-eco.sk Õhufiltrid integreeritud
C-SEERIA JA VJATKA-SEERIA LÄBIVOOLUKUIVATID
 C-SEERIA JA VJATKA-SEERIA LÄBIVOOLUKUIVATID C-SEERIA LÄBIVOOLUKUIVATID TÕHUSAKS JA ÜHTLASEKS VILJA KUIVATAMISEKS Mepu kõrgtehnoloogilised, pideva vooluga, sooja õhuga kuivatid kuivatavad vilja õrnalt,
C-SEERIA JA VJATKA-SEERIA LÄBIVOOLUKUIVATID C-SEERIA LÄBIVOOLUKUIVATID TÕHUSAKS JA ÜHTLASEKS VILJA KUIVATAMISEKS Mepu kõrgtehnoloogilised, pideva vooluga, sooja õhuga kuivatid kuivatavad vilja õrnalt,
(10. kl. I kursus, Teisendamine, kiirusega, kesk.kiirusega \374lesanded)
") TEISENDAMINE Koostanud: Janno Puks 1. Massiühikute teisendamine Eesmärk: vajalik osata teisendada tonne, kilogramme, gramme ja milligramme. Teisenda antud massiühikud etteantud ühikusse: a) 0,25 t = kg
TEISENDAMINE Koostanud: Janno Puks 1. Massiühikute teisendamine Eesmärk: vajalik osata teisendada tonne, kilogramme, gramme ja milligramme. Teisenda antud massiühikud etteantud ühikusse: a) 0,25 t = kg
Microsoft Word - Karu 15 TERMO nr 527.doc
 Termoülevaatus nr.57 (57/1. Märts 8) Hoone andmed Aadress Lühikirjeldus Karu 15, Tallinn Termopildid Kuupäev 6.1.8 Tuule kiirus Õhutemperatuur -1,1 o C Tuule suund Osalesid Kaamera operaator Telefoni nr.
Termoülevaatus nr.57 (57/1. Märts 8) Hoone andmed Aadress Lühikirjeldus Karu 15, Tallinn Termopildid Kuupäev 6.1.8 Tuule kiirus Õhutemperatuur -1,1 o C Tuule suund Osalesid Kaamera operaator Telefoni nr.
Euroopa Liidu Nõukogu Brüssel, 24. september 2015 (OR. en) 12353/15 ADD 2 ENV 586 ENT 199 MI 583 SAATEMÄRKUSED Saatja: Kättesaamise kuupäev: Saaja: Eu
 12353/15 ADD 2 ENV 586 ENT 199 MI 583 SAATEMÄRKUSED Saatja: Kättesaamise kuupäev: Saaja: Eu") Euroopa Liidu Nõukogu Brüssel, 24. september 2015 (OR. en) 12353/15 ADD 2 ENV 586 ENT 199 MI 583 SAATEMÄRKUSED Saatja: Kättesaamise kuupäev: Saaja: Euroopa Komisjon 23. september 2015 Nõukogu peasekretariaat
Euroopa Liidu Nõukogu Brüssel, 24. september 2015 (OR. en) 12353/15 ADD 2 ENV 586 ENT 199 MI 583 SAATEMÄRKUSED Saatja: Kättesaamise kuupäev: Saaja: Euroopa Komisjon 23. september 2015 Nõukogu peasekretariaat
Microsoft Word - Errata_Andmebaaside_projekteerimine_2013_06
 Andmebaaside projekteerimine Erki Eessaar Esimene trükk Teadaolevate vigade nimekiri seisuga 24. juuni 2013 Lehekülg 37 (viimane lõik, teine lause). Korrektne lause on järgnev. Üheks tänapäeva infosüsteemide
Andmebaaside projekteerimine Erki Eessaar Esimene trükk Teadaolevate vigade nimekiri seisuga 24. juuni 2013 Lehekülg 37 (viimane lõik, teine lause). Korrektne lause on järgnev. Üheks tänapäeva infosüsteemide
Technology Esimene PowerSense tehnoloogiaga elektromehaaniline tööriist
 www.klauke.com Technology Esimene PowerSense tehnoloogiaga elektromehaaniline tööriist Ajad muutuvad. Kompaktne ja maksimaalselt tõhus Kõikjal kus vaja kiiret, kergekaalulist ja effektiivset tööriista
www.klauke.com Technology Esimene PowerSense tehnoloogiaga elektromehaaniline tööriist Ajad muutuvad. Kompaktne ja maksimaalselt tõhus Kõikjal kus vaja kiiret, kergekaalulist ja effektiivset tööriista
MS Word Sisukord Uue dokumendi loomine... 2 Dokumendi salvestamine... 3 Faili nimi... 4 Teksti sisestamine... 6 Klaviatuuril mitteleiduvat sümbolite l
 MS Word Sisukord Uue dokumendi loomine... 2 Dokumendi salvestamine... 3 Faili nimi... 4 Teksti sisestamine... 6 Klaviatuuril mitteleiduvat sümbolite lisamine... 6 Uue dokumendi loomine Dokumendi salvestamine
MS Word Sisukord Uue dokumendi loomine... 2 Dokumendi salvestamine... 3 Faili nimi... 4 Teksti sisestamine... 6 Klaviatuuril mitteleiduvat sümbolite lisamine... 6 Uue dokumendi loomine Dokumendi salvestamine
raamat5_2013.pdf
 Peatükk 5 Prognoosiintervall ja Usaldusintervall 5.1 Prognoosiintervall Unustame hetkeks populatsiooni parameetrite hindamise ja pöördume tagasi üksikvaatluste juurde. On raske ennustada, milline on huvipakkuva
Peatükk 5 Prognoosiintervall ja Usaldusintervall 5.1 Prognoosiintervall Unustame hetkeks populatsiooni parameetrite hindamise ja pöördume tagasi üksikvaatluste juurde. On raske ennustada, milline on huvipakkuva
Eesti kõrgusmudel
 Meie: 04.06.2002 nr 4-3/3740 Küsimustik Eesti maapinna kõrgusmudeli spetsifikatsioonide selgitamiseks Eestis on juba aastaid tõstatatud küsimus täpse maapinna kõrgusmudeli (edaspidi mudel) koostamisest
Meie: 04.06.2002 nr 4-3/3740 Küsimustik Eesti maapinna kõrgusmudeli spetsifikatsioonide selgitamiseks Eestis on juba aastaid tõstatatud küsimus täpse maapinna kõrgusmudeli (edaspidi mudel) koostamisest
Ülesanne #5: Käik objektile Kooli ümberkujundamist vajava koha analüüs. Ülesanne #5 juhatab sisse teise poole ülesandeid, mille käigus loovad õpilased
 Ülesanne #5: Käik objektile Kooli ümberkujundamist vajava koha analüüs. Ülesanne #5 juhatab sisse teise poole ülesandeid, mille käigus loovad õpilased oma kujunduse ühele kohale koolis. 5.1 Kohavalik Tiimi
Ülesanne #5: Käik objektile Kooli ümberkujundamist vajava koha analüüs. Ülesanne #5 juhatab sisse teise poole ülesandeid, mille käigus loovad õpilased oma kujunduse ühele kohale koolis. 5.1 Kohavalik Tiimi
Lisa I_Müra modelleerimine
 LISA I MÜRA MODELLEERIMINE Lähteandmed ja metoodika Lähteandmetena kasutatakse AS K-Projekt poolt koostatud võimalikke eskiislahendusi (trassivariandid A ja B) ning liiklusprognoosi aastaks 2025. Kuna
LISA I MÜRA MODELLEERIMINE Lähteandmed ja metoodika Lähteandmetena kasutatakse AS K-Projekt poolt koostatud võimalikke eskiislahendusi (trassivariandid A ja B) ning liiklusprognoosi aastaks 2025. Kuna
Outlookist dokumendi registreerimine Plugina seadistamine Dokumendi registreerimine Outlookist Vastusdokumendi registreerimine Outlookist Outlooki plu
 Outlookist dokumendi registreerimine Plugina seadistamine Dokumendi registreerimine Outlookist Vastusdokumendi registreerimine Outlookist Outlooki plugina ikoon on kadunud Outlooki kasutajad saavad dokumente
Outlookist dokumendi registreerimine Plugina seadistamine Dokumendi registreerimine Outlookist Vastusdokumendi registreerimine Outlookist Outlooki plugina ikoon on kadunud Outlooki kasutajad saavad dokumente
Tõstuksed Aiaväravad Tõkkepuud Automaatika KÄIGUUKSED Käiguuksed on paigaldatavad kõikidele sektsioonuste tüüpidele. Käiguukse saab varustada kas tava
 KÄIGUUKSED Käiguuksed on paigaldatavad kõikidele sektsioonuste tüüpidele. Käiguukse saab varustada kas tavalise või madala lävepakuga. Soovitav on ukse tellimise ajal käiguukse vajadus ning ning lävepaku
KÄIGUUKSED Käiguuksed on paigaldatavad kõikidele sektsioonuste tüüpidele. Käiguukse saab varustada kas tavalise või madala lävepakuga. Soovitav on ukse tellimise ajal käiguukse vajadus ning ning lävepaku
KASUTUSJUHEND
 KASUTUSJUHEND Sissejuhatus Kui valvesüsteem on valvessepanekuks valmis ning puuduvad rikke- ning häireteated, kuvatakse sõrmistiku displeil kellaaeg, kuupäev ning tekst Enter Your Code sisestage kood Peale
KASUTUSJUHEND Sissejuhatus Kui valvesüsteem on valvessepanekuks valmis ning puuduvad rikke- ning häireteated, kuvatakse sõrmistiku displeil kellaaeg, kuupäev ning tekst Enter Your Code sisestage kood Peale
Microsoft Word - Bose_SoundLink_around-ear_Kasutusjuhend.docx
 Bose SoundLink Around- ear II Kõrvaklapid ETTEVAATUSABINÕUD Pikaajaline vali heli võib kahjustada Teie kõrvakuulmist. Vältige kõrvaklappide kasutamist autoga sõitmise ajal. Kõrvaklappide ohutuimaks kasutamiseks
Bose SoundLink Around- ear II Kõrvaklapid ETTEVAATUSABINÕUD Pikaajaline vali heli võib kahjustada Teie kõrvakuulmist. Vältige kõrvaklappide kasutamist autoga sõitmise ajal. Kõrvaklappide ohutuimaks kasutamiseks