TRILOBOT ROBOTI JUHTIMISSÜSTEEM MYRIO KONTROLLERI BAASIL BSc Lõputöö
|
|
|
- Anne Merila
- 2 aastad tagasi
- Vaatused:
Väljavõte

1 Mehhatroonikainstituut Mehhatroonikasüsteemide õppetool MHK40LT Joonas Hallikas TRILOBOT ROBOTI JUHTIMISSÜSTEEM MYRIO KONTROLLERI BAASIL BSc Lõputöö Autor taotleb tehnikateaduste bakalaureuse akadeemilist kraadi Tallinn 2016
2 AUTORIDEKLARATSIOON Deklareerin, et käesolev lõputöö on minu iseseisva töö tulemus. Esitatud materjalide põhjal ei ole varem akadeemilist kraadi taotletud. Töös kasutatud kõik teiste autorite materjalid on varustatud vastavate viidetega. Töö valmis... juhendamisel a. Töö autor... allkiri Töö vastab bakalaureusetööle esitatavatele nõuetele a. Juhendaja... allkiri Lubatud kaitsmisele.... õppekava kaitsmiskomisjoni esimees a.... allkiri 2
3 TTÜ Mehhatroonikainstituut Mehhatroonikasüsteemide õppetool BSc LÕPUTÖÖ ÜLESANNE 2016 aasta 8. semester Üliõpilane: Joonas Hallikas, Õppekava: MAHB02/09 - Mehhatroonika Eriala: Mehhatroonika Juhendaja: Teadur, Maido Hiiemaa (nimi, kood) (amet, nimi) BAKALAUREUSETÖÖ TEEMA: Trilobot roboti juhtimissüsteem MyRIO kontrolleri baasil Trilobot robot control system on the base of MyRIO controller Lõputöös lahendatavad ülesanded ja nende täitmise ajakava: Nr Ülesande kirjeldus Täitmise tähtaeg 1. Olemasolevate andurite, täiturite ja funktsioonide kaardistamine Liidestusprobleemide lahendamine Andurite ja täiturite testprogrammide loomine, diagnostika lauaarvuti abil Kontrolleri paigutamine ja konstruktsioon Triloboti demonstratsioonprogrammi loomine, mis kasutab suuremat osa anduritest ja täituritest ning ei vaja lauaarvutipoolset juhtimist Töö keel: eesti keel Kaitsmistaotlus esitada hiljemalt: Töö esitamise tähtaeg: Üliõpilane Joonas Hallikas /allkiri/ kuupäev Juhendaja Maido Hiiemaa /allkiri/ kuupäev 3
4 SISUKORD EESSÕNA... 6 LÜHENDITE JA TÄHISTE LOETELU SISSEJUHATUS KONTROLLERI ASENDAMINE MYRIO-GA MyRIO kontrolleri parameetrid [2] MyRIO ühendamine arvutiga OLEMASOLEVATE ANDURITE KAARDISTAMINE Vurrud Nupud Heli Servomootorid Haaratsi lüliti Vee sensor Sonar Esituli ja laser Liikumisandur(PIR-andur) Mootorid ja H-sild Mootori kooderid Kiirendusandur MyRIO LED-id ja nupp JUHTIMINE JA KASUTAJALIIDES Rataste mootorid Mootori kooderid Kiirenduse andur Haaratsi ja pea servomootorid Liikumisandur, laser ja esituli Heliväljund, vurrud, veesensor ja nupud Sonar Näidisprogramm LIIDESTUSPROBLEEMIDE LAHENDAMINE Adapterplaat
5 5.2. Adapterplaadi pistikud KONSTRUKTSIOON JA TOIDE Seadmete paigutus Aku valik KOKKUVÕTE SUMMARY KIRJANDUSE LOETELU LISAD Lisa 1. Pea ja haaratsi liigutamise testprogramm Lisa 2. Kasutajaliides Lisa 3. MyRIO ja adapterplaadi paigutus Lisa 4. Adapterplaadi elektriskeem Lisa 5. Adapterplaadi komponendid
6 EESSÕNA Antud lõputöö teema oli välja pakutud Tallinna Tehnikaülikooli Mehhatroonikainstituudi poolt. Mulle pakkus see teema huvi, sest mehhatroonika õppekavas saab oma teoreetilisi oskusi üsna vähe praktilistes töödes kasutada. Lõputöö valmis Tallinna Tehnikaülikooli Mehhatroonikainstituudi teaduri, Maido Hiiemaa juhendamisel. 6
7 LÜHENDITE JA TÄHISTE LOETELU AO AI GND DDR DIO IDC IP LCD LED LiPo PCB PIR PWM UART USB WiFi Analoog väljund; i.k. analog output Analoog sisend; i.k. analog input Maandus; i.k. ground Muutmälu tüüp; i.k. double data rate Digitaalne sisend/väljund; i.k. digital input/output I.k. insulation-displacement contact Internetiaadress; i.k. internet protocol address Vedelkristallekraan; i.k liquid crystal display Valgusdiood; i.k. light emitting diode Liitium polüleer; i.k. lithium polymer Trükkplaat; i.k. printed circuit board Passiivne infrapuna; i.k. passive infrared Impulsi laiuse modulatsioon; i.k. pulse width modulation I.k. universal asynchronus reciever/transmitter Universaalne järjestiksiin; i.k. universal serial bus Juhtmevabasse kohtvõrku ühendamise tehnoloogia 7
8 1. SISSEJUHATUS Teema sai valitud, sest see on pigem praktiline kui teoreetiline ülesanne. Töö teema tulenes TTÜ Mehhatroonikainstituudi soovist kaasajastada olemasoleva robotplatvormi juhtosa. Selles lõputöös oli minu põhiliseks ülesandeks muuta vananenud lahendustega õpperobot Trilobot tänapäevasemaks ning kasutajale mugavamaks. Algse lahendina oli robotil kohmakas trükkplaat mikrokontrolleriga, mille küljes kasutajaliideseks 16 nuppu ja väike LCD ekraan. Toiteks oli kasutatud patareipakki, mis koosnes kaheksast D-tüüpi patareist. Robotil on küljes mitmed andurid, mootorid liikumiseks kui ka servomootorid erinevate liigutuste sooritamiseks. Näiteks on sellel liikumiseks kaks 12 V mootorit optiliste kooderitega, servomootorid pea ja haaratsi liigutamiseks, kaheksa kontaktandurit( vurru ), sonar, infrapuna liikumisandur, sensor veeloikude tuvastamiseks, laser, esituli. Uueks lahenduseks jääb robotile National Instruments i myrio kontroller, mida saab nii programmeerida kui ka juhtida WiFi ühenduse kaudu. Kontrolleri programmeerimine ja uue kasutajaliide tegin NI LabVIEW programmiga, sest need on omavahel lihtsalt ühilduvad. Toite jaoks saab olema robotile 12 V aku, mille laadimine või vahetamine on lihtsam kui endise kaheksa patarei lahendusega. Roboti ja myrio ühendamiseks projekteerisin trükkplaadi, mille ühendamine ja eemaldamine on kasutajasõbralik. Selle lahendusega jääb võimalus lihtsa vaevaga taastada tootjapoolne variant ning uut lahendust saab kasutada ka teiste samasuguste robotite uuendamiseks. Trükkplaadi projekteerimiseks kasutasin vabavarana saadaval olevat programmi Designspark PCB 7.1. Lõpptulemuseks valmib õpperobot Trilobot uute, kasutajasõbralikumate lahendustega ning seda saab kasutada lihtsamalt robootika õpetamisel ja robootika projektide teostamisel. Töö käigu võis jaotada neljaks põhiliseks osaks: Andurite ja täiturite kaardistamine ning töökorrasoleku kontroll Liidestusprobleemide lahendamine uue kontrolleri jaoks Testprogrammide loomine andurite ja täiturite jaoks Näidisprogtrammi loomine 8

9 2. KONTROLLERI ASENDAMINE MYRIO-GA Lõputöö eesmärgiks oli välja vahetada vananenud ja ebamugava kasutajaliidesega kontroller National Instruments-i myrio kontrolleri vastu. Üheks vahetamise põhjuseks on see, et elektroonika on viimastel aegadel väga kiiresti arenenud ja on võimalus teha roboteid kiiremaks ja täpsemaks. Trilobotil oli juhtprotsessoriks Intel 80C32, mille erinevatel versioonidel on maksimaalne taktsagedus 24 MHz, kuid myrio-l on see näitaja 667 MHz, mis on ligi 28 korda suurem. Teiseks suureks erinevuseks kahe kontrolleri vahel on muutmälu maht. See näitaja Triloboti originaalis on 128 KB aga myrio-l 512 MB. MyRIO-l on sisseehitatud kolmeteljeline kiirendusandur, mis teeb mõõtmisi 800 korda sekundis 0,038 m/s 2 täpsusega. Oluliseks lahenduseks Triloboti tänapäevasemaks muutmisel on võimalus ühendada kontroller personaalarvutiga traadita võrgu kaudu. Joonis 2.1 MyRIO kontroller [1] 2.1. MyRIO kontrolleri parameetrid [2] Protsessor Protsessori tüüp: Xilinx Z-7010 Protsessori kiirus: 667 MHz Protsessori tuumade arv: 2 Mälu Püsimälu: 256 MB DDR3 mälu: 512 MB 9
10 DDR3 sagedus: 533 MHz DDR3 andmesiini laius: 16 bit Traadita võrgu omadused Sagedus: ISM 2,4 GHz Levimiskaugus: 150 m Kiirendusmõõtur Telgede arv: 3 Mõõtmisvahemik: ±8 g Resolutsioon 12 bit Diskreetimissagedus: 800 S/s Toide Toitevoolu pinge vahemik: 6-16 VDC(alalisvool) Maksimaalne voolutarve: 14 W Tüüpiline tööta voolutarve: 2,6 W 2.2. MyRIO ühendamine arvutiga MyRIO kontrolleri saab arvutiga ühendada ka traadita võrgu kaudu. Selleks tuleb esmalt ühendada myrio arvutiga USB-kaabli abil ning minna IP-aadressile , mis on esialgsete seadetega sätestatud. Avanenud süsteemi seadete (i.k. system configuration) lehelt tuleb valida traadita võrguga ühendamise viis ja võrk, mille kaudu toimub edaspidi myrio suhtlus arvutiga. Selleks on kolm võimalust: kasutada olemasolevaid traadita võrke, teha ühenduseks eraldi võrk, kasutades WIFI-ruuterit või kasutada selleks myrio traadita võrku. Edasi tuleb LabVIEW projektis myrio-le anda uus IP-aadress, mis sõltub juba eelnevalt tehtud valikutest. Oma lõputöös kasutasin mugavat lahendust: tegin mobiiltelefoniga interneti kuumkoha (i.k. hotspot) ja seadistades myrio ja arvuti automaatselt võrguga ühendama. Kui seda lahendust kasutada koolis robootika õpetamisel, saab myrio seadistada kohaliku võrguga ühendamiseks. 10

11 3. OLEMASOLEVATE ANDURITE KAARDISTAMINE Esimeseks ülesandeks oli Trilobot õpperoboti manualiga tutvumine, mille käigus teada saada, millised andurid ja täiturid robotil on ning katsetada, kas kõik neist ka töökorras. Mõningad funktsioonid sellel Trilobotil puudusid võrreldes roboti manualiga. Näiteks ei olnud antud robotil kompassi, LED-tulesid, valguse andureid, kallutusandureid ja temperatuuriandurit. Sellegipoolest võtsin ülesandeks puuduvate andurite ühildatavuse tagamise, et võimalusel ja vajadusel neid lisada. MyRIO kasutamine kontrollerina korvab osaliselt neid puudujääke. Nimelt on myrio-l kiirendusandur, millega võib asendada kallutusandureid ja neli LED-tuld Vurrud Robotil on all ääres kaheksa vurru (kaks ees, kaks ees nurkades, kaks taga ja mõlemal küljel üks), mis väikese koormusega painduvad ja lähevad kontakti kerega (GND), moodustades vooluringi ja andes signaali (joonis 3.1). Kui sonarit saab kasutada kokkupõrke vältimiseks, siis vurrusid kasutatakse kokkupõrke tuvastamiseks. Robotile on võimalik programmeerida tegevused objektiga kokkupuutesse sattumise korral. Näiteks võib leida alternatiivse teekonna takistuse vältimiseks või lihtsalt edastada info kasutajale. Vurrud peaksid seisu ajal paiknema metallrõnga keskosas, et vältida valesignaali liikumisel tekkiva vibratsiooni tõttu. Võimalus on ka vurrud asendada teistsuguste lülititega (näiteks: mehaaniline nupp, optiline lüliti). Joonis 3.1 Triloboti vurr 11

12 3.2. Nupud Roboti mõlemal küljel on üks nupp (paremal pool roheline, vasakul punane), mida saab kasutaja enda programmi kirjutamisel kasutada. Nad on kergesti ligipääsetavad ja seetõttu on neid hea kasutada näiteks hädastopp nupuna. Tegemist on normaalselt suletud lülitiga, mis tähendab, et nupu vajutamisel vooluring katkeb. Joonis 3.2 Nupp Triloboti küljel 3.3. Heli Robotil on peal 3-tolline kõlar koos helitugevuse reguleerimisnupuga. Seda saab kasutada erinevate helide ja signaalide väljastamiseks, informeerides kasutajat vastava olukorra tekkimisest. Näiteks võib kasutada heliväljundit koos veesensoriga ja kontakti saavutamisest kasutajale märku anda Servomootorid Robotil olevaid nelja servomootorit läheb tarvis haaratsi tõstmiseks, haaramiseks, pea keeramiseks ja tõstmiseks. Pead saab keerata 180 kraadi ulatuses ja tõsta kuni 90 kraadi üles ja langetada 15 kraadi alla. Kasutuses on Hobico CS-61 servomootorid. Tehnilised andmed [10]: Pöördemoment: 3,02 kg/cm Kiirus: 353º/s Kaal: 49,6 g 12


13 3.5. Haaratsi lüliti Roboti haaratsi küljes on lüliti, mis tuvastab objekti olemasolu haaratsi vahel. Robotil on võimalus ka teine lüliti lisada. Neid lüliteid on võimalik asendada ka teistsuguste mehaaniliste või optiliste lülititega. Joonis 3.3 Mikrolüliti SM5[11] 3.6. Vee sensor Roboti all on andur, mis tuvastab roboti all olevaid veelompe. Tegemist on väga lihtsa sensoriga, mis koosneb väga väikesest trükkplaadist, mille ühe raja külge kinnitub üks digitaalne sisend ja teine rada on viidud kontakti kerega. Mõlema raja teiseks pooleks on väike klemm, mis on viidud võimalikult madalale. Kui vesi sulgeb vooluringi, saab programm sellekohase signaali. Veeloigu tuvastamiseks peab sügavus olema üle 3,5 mm. Anduri signaal lõppeb viitega, sest vee mahavalgumiseks kulub aega. Joonis 3.4 Veesensor 13
 s objekti kaugus (m) t aeg ultraheli väljasaatmisest signaali saabumiseni (s) v h helikiirus (m/s) Selle arvutuse kohaselt vastab igale")
14 3.7. Sonar Robotil on ultraheliandur objektide kauguse määramiseks. Sonar asub roboti pea küljes, et mõõtmissuuna muutmiseks ei peaks tervet robotit keerama. Joonis 3.5 Triloboti sonar Objekti kaugust arvutatakse valemiga: ( ) s objekti kaugus (m) t aeg ultraheli väljasaatmisest signaali saabumiseni (s) v h helikiirus (m/s) Selle arvutuse kohaselt vastab igale sentimeetrile 58,8 μs. Ultraheliandur ei tagasta usaldatavaid mõõtmistulemusi, kui objekt on liiga lähedal või liiga kaugel. Sonar ei pruugi tuvastada peenikesi (traat) või heli summutavaid (pehme vaip, švamm) esemeid, sest sel juhul on tagasi põrkav helilaine liiga nõrk, et vastuvõtja seda tuvastaks. Ebatäpsed väärtused võivad ka tekkida, kui mõõta seina terava nurga all ja siis helilaine põrkab enne tagasi jõudmist mitmel objektil. Anduri tehnilised andmed: Minimaalne kaugus: 15,2 cm Maksimaalne kaugus 457 cm Mõõtemääramatus: ±2,5 cm Heli sagedus: 40 khz 14

15 Triloboti sonari vastuvõtja ei töötanud ning ma paigaldasin robotile uue. Valisin selleks HC-SR04, sest see on üks levinumaid ultraheli andureid ja sel on võrreldes Triloboti originaaliga sarnased tehnilised näitajad. Joonis 3.6 Sonar HC-SR04 [3] Ultraheliandur HC-SR04 vajab 10-mikrosekundilist signaali, mille peale saadab kaheksatsüklilise 40 khz ultraheli välja. Vastuvõtja tuvastab objektilt tagasi peegeldunud heli ja sellekohane signaal jõuab kontrollerisse (joonis 3.7). HC-SR04 töötab kaugustel vahemikus cm ja mõõtenurk on 15º. [4] Joonis 3.7 Sonari ajastuse skeem 15
 Roboti pea küljes on passiivne infrapuna andur, mis tuvastab liikumist.")

16 3.8. Esituli ja laser Esituli ja laser asuvad pea küljes ja neid saab programmiliselt lülitada. Mõlemad kasutavad 5 V toidet. Laseri võimsus on alla 5 mw ja valguse lainepikkus nm. Joonis 3.8 Triloboti esituli ja laser 3.9. Liikumisandur(PIR-andur) Roboti pea küljes on passiivne infrapuna andur, mis tuvastab liikumist. Anduri sees on tundlik element, mille temperatuur muutub, kui sellele langev soojuskiirguse hulk erineb ning sellest tekib pinge erinevus elektriskeemis. Tundlikkuse suurendaiseks on anduri ees plastikust kuppel, mis koondab valguskiiri ja laseb läbi peamiselt infrapunakiirgust. Andur tuvastab elusolendite liikumist, reageerides neilt eralduvale infrapunakiirtele. Andur reageerib ka siis, kui robotit ennast liigutada. Joonis 3.9 Liikumisandur 3.10 Mootorid ja H-sild Trilobotil on kolm ratast, millest kahte veavad ringi mootorid. Mootorid töötavad pingel 12 V alalisvooluga, ning tagasisidet pöörlemiskiiruse kohta saab optiliste enkoodrite abil. 16
17 Mootorite tehnilised andmed: Toitepinge 12 V 0,5 A koormuseta 1,6 A täiskoormusel Pöörlemiskiirus täiskoormusel 73 pööret minutis. Mootorite juhtimiseks kasutan H-silda L298HN. Oli võimalus ka kasutada valmis mootori kontrollerit, millel keskseks elemendiks oli see sama H-sild. Lihtsalt L298HN on mitu korda soodsam ja lõpptulemus on peaaegu sama. Kuigi selle mikroskeemi maksimaalne töötemperatuur on 130ºC on soojenemise tõttu vaja ka radiaatorit, et ei tekiks ülekuumenemist. Mikroskeem L298HN on mõeldud kahe mootori juhtimiseks ning töötab pingega kuni 46 V ja maksimaalse voolutugevusega 4 A. Kasutades kolme sisendit mootori kohta on võimalik muuta voolusuunda väljundites. L298HN omab ka kahte väljundit voolutugevuse monitoorimiseks. [5] Joonis 3.10 L298 HN väljundid ja skeem [6] 17


18 3.11. Mootori kooderid Robotil on mõlema mootori liikumise monitoorimiseks optilised kooderid (H21A1). Mootori hammasrihma ratta külge on kinnitatud ketas 22 hambaga, mis takistavad kooderi LED-i valguse jõudmist fototransistorile. Kooderi resolutsiooniks on seega 22 lugemit pöörde kohta. Kuid kui programmis lugeda nii kooderi pinge langu kui ka tõusu, siis saab pöörde kohta 44 lugemit. Triloboti ratta läbimõõt on 88,9mm ning ümbermõõt P=88,9π=279,3 mm Kui ratta läbimõõt jagada lugemite arvuga pöörde kohta, siis saab roboti ratta pöördenurga mõõtemääramatuseks 8,2º, mis vastab läbitud teepikkusele 6,35 mm. Joonis 3.11 H21A1 skeem[7] Joonis 3.12 Mootori kooder Kiirendusandur MyRIO kontrolleri sisse on monteeritud kolmeteljeline kiirendusandur ning see mõõdab igas suunas kuni ±78,5 m/s 2 kiirendust. Kasutada saab seda näiteks roboti mootorite poolt tekitatud kiirenduse mõõtmiseks. Teiseks kautusalaks võib kiirendusandurit kasutada kallutusandurina roboti ühtlasel liikumisel või paigalseisul. Kui raskuskiirendus sellisel juhul on jaotunud erinevatele telgedele, siis saab kaldenurga välja arvutada. Näiteks külgsuunas kallaku nurga saab välja arvutada valemiga: ( ) α nurk roboti telje ja vertikaalsihi vahel Z a kiirendusanduri näit Z-teljel, kui telje positiivne suund on suunatud üles 18

19 X a kiirendusanduri näit X-teljel Märkus. Sõltuvalt telgede valitud suundadest võib olla nurga väärus ka negatiivne MyRIO LED-id ja nupp MyRIO kontrolleri küljes on neli programmeeritavat sinist LED-tuld ja monostabiilne nupp. Hea on kasutada LED-tulesid ühes programmis koos indikeerides erinevaid tasemeid. Näiteks võib neid kasutada aku pinge monitoorimiseks ning programmiliselt on määratud igale LED-tulele maksimaalne väärtus. Pinge langedes hakkavad ka tuled järjest kustuma. Joonisel 3.13 on näidatud kuidas sisendi väärtust võrreldakse etteantud väärtustega a, b, c ja d ning vastavalt sellele hakkavad LED-id põlema. Joonis 3.13 LED-jada loogikaskeem 19
20 4. JUHTIMINE JA KASUTAJALIIDES Minu eesmärgiks oli teha erinevatele anduritele ja täituritele testprogrammid ja lõpuks üks koondprogramm kasutajaliidesega. Selleks kasutasin visuaalse programmeerimise programmi LabVIEW. Robotit saab kasutada edaspidi õppetegevuses ja programme on võimalik täiustada. Siin toon välja näiteid testprogrammide funktsioonisest, kasutajaliidesest ja roboti juhtimisest Rataste mootorid Rattaid vedavate mootorite juhtimiseks kasutan H-silda ja selleks kulub mõlema mootori kohta kolm digitaalset väljundit: kaks PWM signaali jaoks ja üks lubamiseks (enable). Kuna PWM väljundid olid kasutuses, siis tekitasin väljundisse programmiliselt muudetava pulsilaiusega signaali ja H-sillas lühise tekkimise vältimiseks seadistasin minimaalseks pulsilaiuseks 20%. Katse tulemused näitasid, et alla 3 V toitepinge juures ei käinud ilma koormuseta mootorid ringi ning seega ei ole vaja alla 25% pulsilaiuse juures üldse mootoreid pingestada. Valisin minimaalseks pulsilaiuseks 20% sellepärast, et väikese pinge korral mootor küll ei liigu, aga see-eest toimib pidurina vastupidises suunas. Kasutajaliideses on kaks liugurit, mille väärtust saab muuta ka arvuti klaviatuuril olevaid nuppe kasutades Mootori kooderid Kooderite tagasisidet ma mootorite juhtimisel ära ei kasuta, aga kasutajaliideses kuvan rataste liikumiskiirused. Seda infot on kasutajal kerge töödelda ja tagasisidet arvestades erinevaid funktsioone luua. Programmis pöörlemiskiiruse leidmiseks arvutan viimase nelja 0,1 sekundi jooksul tehtud mõõtmise tulemuste keskmise ja sellega vähendan üleliigset müra kiiruse väärtuses. Tulemuseks kuvan 0,4 sekundi keskmise kiiruse. Tagasiside silumise põhjuseks on see, et väikesel liikumiskiirusel on enkoodri lugemeid vähe ja väljundis võivad sama reaalse kiiruse juures kuvatav kiirus suuresti varieeruda. Näiteks kiirusel 10 cm/s on kooderi lugemeid sekundis 15 või 16 ja seega igal mõõtmisel 1 või 2. Sellisel juhul ei saa tagasisidet arvestada, kui kuvatav kiirus erineb tegelikkusest kuni 100%. 20

21 4.3. Kiirenduse andur Kiirendusanduri näidisprogrammis mõõdan iga telje suunas kiirendust ja väljastan nad ühele graafikule. Kasutajaliideses kuvatakse ka maksimaalne kogukiirendus, mida on võimalik lülitist nullida. Kogukiirenduse arvutamiseks kasutan valemit:, kus a k kogukiirendus X, Y, Z teljesihilised kiirendused Joonis 4.1 Kiirendusanduri testprogramm Testprogrammis kasutan kiirendusandurit ka kallutusandurina. Peatükis kirjeldatud valemi järgi arvutan kallutuse külg- ja liikumissuunas. Kuna LabVIEW programm arvutab arkustangensi radiaanides, siis kasutajale arusaadavamaks muutmiseks arvutan need väärtused ringi nurgakraadideks järgmise valemiga: α deg =(α rad 180º)/π, kus α deg nurk kraadides α rad nurk radiaanides 21
 4.5.")
22 4.4. Haaratsi ja pea servomootorid Servomootorite juhtimiseks on kasutajaliideses liugurid ning haaratsi jaoks kaks lülitit. Haaratsi liigutamiskeks saab valida manuaalse ja automaatse režiimi vahel. Servomootoreid juhin PWM signaaliga ning arvestades pea ja haaratsi maksimaalseid asendeid, arvutasin programmis välja pulsilaiuste piirväärtused. (Lisa 1) 4.5. Liikumisandur, laser ja esituli Testprogrammis kasutan infrapuna liikumisandurit esitule lülitamiseks. Selleks võrdlen andurist väljuvat pinget ja annan digitaalväljundisse tõese signaali (joonis 2.1). Liikumisanduri funktsiooni on kasutajaliideses võimalik välja lülitada. Laseri sisselülitamiseks on kahepoolse toimega lüliti. Joonis 4.2 Esitule testprogramm 4.6. Heliväljund, vurrud, veesensor ja nupud Testprogrammis genereerin väljundisse erineva sagedusega helisignaale. Kasutajaliideses on kaheksa lülitit, millega saab valida esimese oktaavi helikõrguste võnkesagedusi (joonis 4.3). 22

23 Joonis 4.3 Heliväljundi testprogramm Vurrude ja veesensori tagasisidet ma ei kasuta kuid kuvan kasutajaliideses signaalid LED-ide abil. Programmis võib olla nende funktsiooniks mootorite seiskamine. Nuppe võib kasutada näiteks hädastopina, mis peatab kogu roboti tegevuse Sonar Sonari testprogramm mõõdab kaugust ja kuvab selle kasutajaliideses. Iga 100 millisekundi järel saab sonar 10µs impulsi ning saadab välja kaheksa võnget kõrgsageduslikku heli ja kui signaal tagasi sisendisse jõuab, salvestab programm mikrosekundi lugeri väärtuse, mille abil arvutab välja objekti kauguse. Valelugemite vältimiseks seadsin kaugusele piirväärtused, arvestades sonari tööpiirkonda. Minimaalseks väärtuseks on 300 µs, mis vastab 5,1 sentimeetrile ja maksimaalseks µs, mis vastab kaugusele 391 cm Näidisprogramm Näidisprogrammis on kokku kogutud kõik testprogramide koodid. Kasutajaliideses on indikaatorid, graafikud, juhtnupud ja -liugurid korrektselt paigutatud ja lisatud mõned kasutajat juhendavad sildid. (Lisa 2) Lisasin näidisprogrammi hädastop funktsiooni, mis rakendub Triloboti punase nupu vajutamisel. See annab võimaluse kogu programmi peatada ka siis, kui juhtimiseks kasutatav personaalarvuti eemal on. 23




24 5. LIIDESTUSPROBLEEMIDE LAHENDAMINE Vana kotrolleri väljavahetamiseks oli vaja ühendused teha uuele sobivaks. Üheks variandiks oli eemaldada robotilt kõik juhtmed ja MyRIO kontaktidest uued vedada, sest olemasolevad pistikud uue lahendusega ei sobi. Teiseks variandiks oli teha trükkplaat uue kontrolleri ühendamiseks roboti küljes olevate pistikutega. Viimane jätab võimaluse lihtsa vaevaga taastada vajadusel Triloboti esialgne ehitus ja samas saab kasutada seda ka teistel samasugustel robotitel. Olenemata sellest, et robot ei ole komplektne, arvestasin liidestuse väljatöötamisel ka puuduvate elementidega. Sellisel juhul saab vajadusel Triloboti järk-järgult täiendada, ilma et peaks uusi lahendusi projekteerima. Joonisel 5.1 on toodud välja ühendused uue lahenduse puhul. Sellelt skeemilt on näha, et kogu infovahetus käib läbi adapterplaadi. 12V aku MyRIO kiirendusandur Adapterplaat H-sild Trilobot Mootorid Joonis 5.1 Liidestuse blokkskeem 24
25 5.1. Adapterplaat Adapterplaadiks on trükkplaat, mille projekteerimiseks kasutasin programmi Designspark PCB 7.1. Põhiliseks eesmärgiks adapterplaadil oli ühendada Triloboti küljes olevate 40 ühendusega pistikud myrio 34 ühendusega pistikutega. Lisaks ühendamisele on plaadil kaheksa LED tuld, mis on vurrude kontakti indikaatoriteks, H-sild mootorite juhtimiseks ja näiteks kooderite loogikaskeemid (Lisa 5). Adapterplaat tuli mõõtudega 182,88 x 198,12mm, sest disainitud PCB on kahekihiline ja ühendada oli vaja 245 jalga. Arvestades Troloboti ja myrio väljundite iseloomu, oli ka palju ristuvaid radasid. Adapterplaadi disaini kompaktsemaks muutmiseks oleks vaja teha vähemalt neljakihiline PCB. Trükkplaadil on kokku kaheksa pistikut, mis on vajalikud myrio ja Triloboti ühendamiseks, mootorite väljundiks, 12 V toite jaoks ja kaks pistikut on välja toodud kasutamata või ühendamata funktsioonide jaoks. Kõik pistikud on valitud klemmisammuga 2,54 mm. Nii Triloboti kui ka myrio ühendamiseks adapterplaadiga saab kasutada vastavalt 2x20 ja 2x17 ribakaableid. 25

26 5.2. Adapterplaadi pistikud Myrio pistik A 1 +5 V 18 DIO; vurr 3 2 AO; 19 DIO; vurr 4 3 AI; sonari vastuvõtja 20 DGND 4 AO; 21 DIO; vurr 5 5 AI; PIR-sensor 22 DIO; vurr 6 6 AGND 23 DIO; vurr 7 7 AI; mootori kooder 1 24 DGND 8 DGND 25 DIO; vurr 8 9 AI; mootori kooder 2 26 DIO; veesensor 10 UART.RX 27 DIO/PWM; haaratsi servo 1 11 DIO; laser 28 DGND 12 DGND 29 DIO/PWM; haaratsi servo 2 13 DIO; esituli 30 DGND 14 UART.TX 31 DIO/PWM; kõlar 15 DIO; vurr 1 32 DIO; nupp 1(roheline) 16 DGND 33 +3,3 V 17 DIO; vurr 2 34 DIO; nupp 2(punane) Joonis 5.2 MyRIO väljundite tüübid[8] 26

27 Myrio pistik B 1 +5 V 18 DIO; haaratsi lüliti 1 2 AO; punane LED 19 DIO; mootor 1 luba(enable) 3 AI; valguse andur 1 20 DGND 4 AO;roheline LED 21 DIO; mootor 2 luba(enable) 5 AI; valguse andur 2 22 DIO; haaratsi lüliti 2 6 AGND 23 DIO; joone sensor 1 7 AI; valguse andur 3 24 DGND 8 DGND 25 DIO; joone sensor 2 9 AI; valguse andur 4 26 DIO; joone sensor 3 10 UART.RX 27 DIO/PWM; pea kõrguse servo 11 DIO; mooto 1 sisend 1 28 DGND 12 DGND 29 DIO/PWM; pea asimuudi servo 13 DIO; mootor 1 sisend 2 30 DGND 14 UART.TX 31 DIO/PWM; 15 DIO; mootor 2 sisend 1 32 DIO; joone sensor 4 16 DGND 33 +3,3 V 17 DIO; mootor 2 sisend 2 34 DIO; sonari saatja Joonis 5.3 MyRIO sisendite ja väljundite asetus[2] 27
28 Troloboti kere pistik 1 Vurr 1 2 Vurr 2 3 Vurr 3 4 Vurr 4 5 Vurr 5 6 Vurr 6 7 Vurr 7 8 Vurr 8 9 Emitter V kooderi anood kooderi katood kooderi kollektor kooderi emitter kooderi anood kooderi katood kooderi kollektor kooderi emitter 19 Võti(ühenduseta) 20 Nupp 1 (roheline) 21 GND 22 Nupp 2 (punane) 23 GND 24 Kõlar 25 Haaratsi servo V 27 GND 28 Haaratsi servo V 30 GND 31 Haaratsi lüliti 1 32 Haaratsi lüliti 2 33 Vee sensor 34 Joone sensori emitter 35 Joone sensor 1 36 Joone sensor 2 37 Joone sensor 3 38 Joone sensor 4 39 GND V 28
29 Triloboti pea ja masti pistik 1 Kompassi takteerimissignaal 2 Kompassi andmed(data) 3 Kompassi slave select 4 Kompassi reset 5 Kallutusandur eesmine 6 Kallutusandur parem 7 Kallutusandur tagumine 8 Kallutusandur vasak 9 Valgustugevuse andur ees 10 Valgustugevuse andur paremal 11 Valgustugevuse andur taga 12 Valgustugevuse andur vasakul 13 Infrapuna saatja 14 Temperatuuriandur 15 LED roheline 16 LED punane V V 19 GND 20 GND V V V V 25 GND 26 GND 27 Sonari saatja 28 Sonari vastuvõtja 29 Heli sisend 30 Video 31 Esituli 32 Laser 33 Infrapuna vastuvõtja 34 Infrapuna liikumisandur 35 Pea keeramise servo 36 Pea tõstmise servo 37 Võti(ühenduseta) 38 Ergutus 39 Ei ole ühendatud 40 Ei ole ühendatud Joonis 5.4 Triloboti pistik[9] 29
30 Lisapistik 1 Esimene lisapistik on myrio kasutamata sisendite ja väljundite jaoks V 7 A4; AO 2 +3,3 V 8 B31; PWM 3 A14; UART.TX 9 +3,3 V 4 GND 10 GND 5 A10;UART.RX 11 B14; UART.TX 6 GND 12 B10; UART.RX Lisapistik 2 Teine lisapistik on Triloboti ühendamata funktsioonide jaoks. 1 Kompasi takteerimissignaal 8 Kallutusandur vasak 2 Kompassi andmed 9 Infrapuna saatja 3 Kompassi slave select 10 Temperatuuriandur 4 Kompassi reset 11 Heli sisend 5 Kalliutusandur eesmine 12 Video 6 Kallutusandur parem 13 Infrapuna vastuvõtja 7 Kallutusandut tagumine 14 - Ergutus 30
31 6. KONSTRUKTSIOON JA TOIDE MyRIO, trükkplaadi ja aku paigaldamiseks robotile otsustasin kasutada võimalikult palju Triloboti originaalosasid ja neid võimalikult vähe muuta. Põhjuseks esialgse disaini taastamise lihtsus ja võimalus kasutada sama disaini ka teiste Triloboti robotitel vähese ümberehitusega. Toiteks saab olema robotil 12V aku Seadmete paigutus MyRIO kinnitub aasadega Triloboti vaheplaadi külge kahe M4 poldi abil ning plaat omakorda roboti kere külge nelja originaal kinnituspoldiga. Trükkplaadi paigaldamiseks mõeldud detailid hoiavad seda roboti keskosast eemal, mis annab lisaruumi myrio-le. Need omakorda kinnituvad kere külge samasuguste kinnituspoltidega. Aku paigal hoidmiseks piisab näiteks takjaribast, sest robot ei ole võimeline suurteks kiirendusteks (Lisa 3) Aku valik Aku peab olema väljundpingega 12 V ning valikul tuleb arvestada mitme parameetriga: mass, mahutavus, mõõtmed. Konstruktsioonist tulenevalt saavad aku maksimaalsed mõõtmed olla järgmised: Kõrgus koos klemmidega: 80 mm Pikkus: 195 mm Laius: 55 mm Suuremad energia tarbijad robotil on rattaid vedavad mootorid, mis tarbivad täiskoormusel 1,6 A voolu ja myrio, mis kasutab maksimaalselt 1,2 A. Kui arvestada, et Trilobot ei tööta koguaeg täisvõimsusel ja töötavad ka mõned andurid ning servomootorid, siis kasutatava aku mahutavus võiks olla üle 5 Ah. Kõige paremini sobib robotile LiPo aku, sest see kaalub vähe ja on sama mahutavuse juures väiksemate mõõtudega. Näiteks 5 ampertunnise pliiaku mass on umbes 1,8 kg ja 6,8 Ah LiPo patareipaki mass on 300 g. 31
32 KOKKUVÕTE Käesolevas töös sai lahendatud vananenud lahendustega õpperoboti kontrolleri väljavahetamisega seotud probleeme. Edaspidi saab seda robotit kasutada õppetöös robootika õpetamisel ja erinevates projektides selles vallas. Uue lahendusena on Triloboti ühendatud myrio-ga, mida on võimalik programmeerida ja juhtida WiFi kaudu. Võrreldes andmelehtedega on minu kasutuses olnud robotil osad andurid puudu, kuid jätsin võimaluse need hiljem lisada. Triloboti ja kontrolleri ühendamiseks disainisin vaheadapteriks kahepoolse trükkplaadi, kuhu saab pistikutega ühendada nii roboti kui ka myrio ühenduspesad ning samuti mootorid ja 12 V aku toite. Kuna adapterplaat on liiga suur, siis peaks see olema disainitud vähemalt neljakihiliseks. Lahenduse loomisel ja seadmete paigutamisel arvestasin sellega, et oleks võimalikult lihtne taastada roboti endine seisukord. Seda lahendust saab paigaldada ka teistele samasugustele robotitele Tegin erinevatele anduritele ja mootoritele testprogrammid, et saaks testida roboti elemente eraldi. Valmis ka näidisprogramm koos kasutajaliidesega, kust saab Triloboti juhtida ja näeb tagasisidet anduritelt. See lahendus on kasutajale mugav võrreldes Triloboti originaalversiooniga, sest kogu info saabub ühele ekraanile ning ei pea erinevatest anduritest pärit informatsiooni nägemiseks menüüs ringi liikuma. 32
33 SUMMARY During this work I solved problems of replacing an old controller of a Trilobot robot with a myrio. This robot is for educational pupose and it can be used to teach robotics and do different projects in this area. As a new solution there will be myrio on Trilobot, which can be programmed and controlled via WiFi. The Trilobot I used in my project missed some sensors compared to datasheet, but I made it possible to add theese later if needed. I designed 2-layer PCB as adapter to connect Trilobot and myrio controller. Current design is too big so it should have at least 4 layers to be more compact. This board also has connections for motors and 12 V battery. As I was making this project I took into account that it should take as less effort as possible to rebuild original version. This solution can also be used on other same kind of robots without lots of construction. I also made testing programs for sensors and motors to test individual parts separately. In LabVIEW environment I did example program with user interface, where it is possible to operate Trilobot and monitor information from sensors. This solution is userfriendly compared to Trilobot original user interface, because all information is shown together and it is not needed to browse in different menus. 33
34 KIRJANDUSE LOETELU [1] [WWW] ( ) [2] [WWW] ( ) [3] [WWW] ( ) [4] [WWW] ( ) [5] [WWW] /CD pdf/files/CD pdf/jcr:content/translations/en.CD pdf ( ) [6] [WWW] ( ) [7] [WWW] ( ) [8] [WWW] ( ) [9] [WWW] ( ) [10] [WWW] ( ) [11] [WWW] ( ) 34

35 LISAD Lisa 1. Pea ja haaratsi liigutamise testprogramm 35
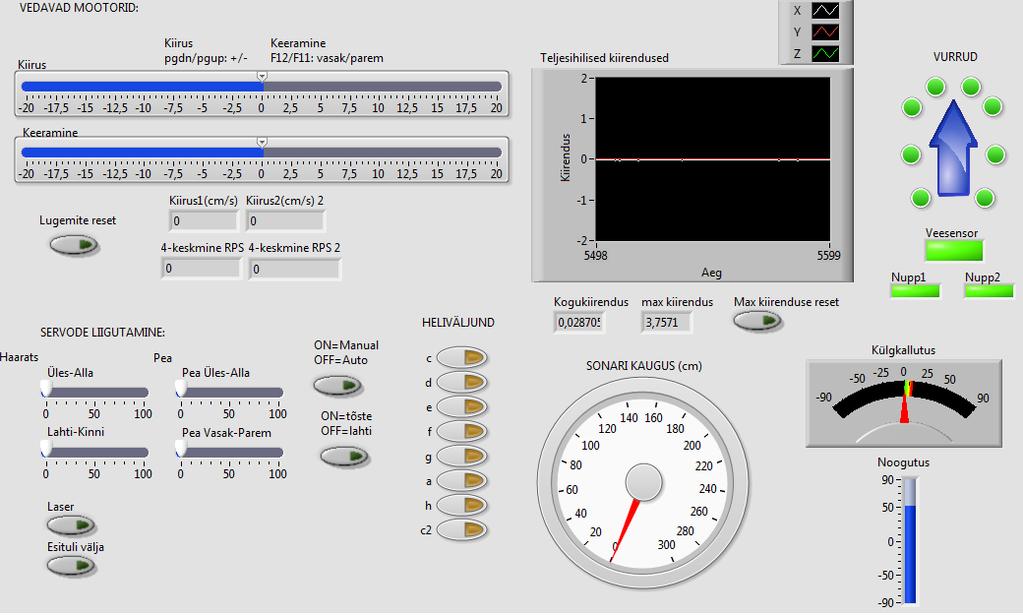
36 Lisa 2. Kasutajaliides 36

37 Lisa 3. MyRIO ja adapterplaadi paigutus 37
38 Lisa 4. Adapterplaadi elektriskeem 38
39 Lisa 5. Adapterplaadi komponendid Adapterplaadi komponendid: H-sild L298HN 2x20 2,54 mm IDC pistik 2tk 2x17 2,45 mm IDC pistik 2tk 2x7 2,45 mm IDC pistik 1x12 2,45 mm IDC pistik 2x3 2,45 mm IDC pistik 1x4 3,96 mm IDC pistik 3 mm LED, 630 nm 8tk 150 Ω takisti 10tk 330 Ω takisti 2tk 2,2k Ω takisti 2tk 10 Ω takisti 2tk 39
6 tsooniga keskus WFHC MASTER RF 868MHz & 4 või 6 tsooniga alaseade SLAVE RF KASUTUSJUHEND 6 tsooniga WFHC RF keskus & 4 või 6 tsooniga alaseade SLAVE
 6 tsooniga keskus WFHC MASTER RF 868MHz & 4 või 6 tsooniga alaseade SLAVE RF KASUTUSJUHEND 6 tsooniga WFHC RF keskus & 4 või 6 tsooniga alaseade SLAVE RF 868MHz 3-6 EE 1. KASUTUSJUHEND 6 tsooniga WFHC
6 tsooniga keskus WFHC MASTER RF 868MHz & 4 või 6 tsooniga alaseade SLAVE RF KASUTUSJUHEND 6 tsooniga WFHC RF keskus & 4 või 6 tsooniga alaseade SLAVE RF 868MHz 3-6 EE 1. KASUTUSJUHEND 6 tsooniga WFHC
B120_10 estonian.cdr
 Alati seal, et teid aidata Registreerige oma toode ja otsige abi koduleheküljelt www.philips.com/welcome B120 Beebimonitor Küsimus? Kontakteeruge Philipsiga Eestikeelne kasutusjuhend 2 Valgussensor USB
Alati seal, et teid aidata Registreerige oma toode ja otsige abi koduleheküljelt www.philips.com/welcome B120 Beebimonitor Küsimus? Kontakteeruge Philipsiga Eestikeelne kasutusjuhend 2 Valgussensor USB
Document number:
 WNR Kiirpaigaldusjuhend Lisateavet, juhised ja uuendused saab leida internetist aadressil http://www.a-link.com Kiirpaigaldusjuhend Komplekt sisaldab: - WNR repiiter - Paigaldusjuhend Ühendused / Ports:
WNR Kiirpaigaldusjuhend Lisateavet, juhised ja uuendused saab leida internetist aadressil http://www.a-link.com Kiirpaigaldusjuhend Komplekt sisaldab: - WNR repiiter - Paigaldusjuhend Ühendused / Ports:
P9_10 estonian.cdr
 Registreerige oma toode ja saage abi kodulehelt www.philips.com/welcome P9/10 Eestikeelne kasutusjuhend 2 Ühendage P9 kõlar Bluetooth ühenduse kaudu oma Bluetooth seadmega, nagu näiteks ipadiga, iphone'iga,
Registreerige oma toode ja saage abi kodulehelt www.philips.com/welcome P9/10 Eestikeelne kasutusjuhend 2 Ühendage P9 kõlar Bluetooth ühenduse kaudu oma Bluetooth seadmega, nagu näiteks ipadiga, iphone'iga,
TTÜ Robotiklubi
 Robot Igaühele Robootika ja elektroonika põhitõed Programmeerimine, Arduino Roboti disain ja ehituse algus Roboti ehitus ja jootmine Robotite programmeerimine Ülesande lahendamine Lõppvõistlus Sissejuhatus
Robot Igaühele Robootika ja elektroonika põhitõed Programmeerimine, Arduino Roboti disain ja ehituse algus Roboti ehitus ja jootmine Robotite programmeerimine Ülesande lahendamine Lõppvõistlus Sissejuhatus
SINU UKS DIGITAALSESSE MAAILMA Ruuter Zyxel LTE3302 JUHEND INTERNETI ÜHENDAMISEKS
 SINU UKS DIGITAALSESSE MAAILMA Ruuter Zyxel LTE3302 JUHEND INTERNETI ÜHENDAMISEKS OLULINE TEAVE: LOE ENNE RUUTERI ÜHENDAMIST! Ruuter on sinu uks digitaalsesse maailma. Siit saavad alguse kõik Telia teenused
SINU UKS DIGITAALSESSE MAAILMA Ruuter Zyxel LTE3302 JUHEND INTERNETI ÜHENDAMISEKS OLULINE TEAVE: LOE ENNE RUUTERI ÜHENDAMIST! Ruuter on sinu uks digitaalsesse maailma. Siit saavad alguse kõik Telia teenused
DE_loeng5
 Digitaalelektroonika V loeng loogikalülitused KMOP transistoridega meeldetuletus loogikalülitused TTL baasil baaslülitus inverteri tunnusjooned ja hilistumine LS lülitus kolme olekuga TTL ja avatud kollektoriga
Digitaalelektroonika V loeng loogikalülitused KMOP transistoridega meeldetuletus loogikalülitused TTL baasil baaslülitus inverteri tunnusjooned ja hilistumine LS lülitus kolme olekuga TTL ja avatud kollektoriga
DJI GOGGLES Kiirjuhend V1.0
 DJI GOGGLES Kiirjuhend V1.0 DJI Goggles DJI Goggles on mugavad prillid, mis on disainitud mugavaks FPV lendamiseks DJI toodetega. Nad loovad ultra-kõrge kvaliteediga pildi, minimaalse viivitusega pikamaa
DJI GOGGLES Kiirjuhend V1.0 DJI Goggles DJI Goggles on mugavad prillid, mis on disainitud mugavaks FPV lendamiseks DJI toodetega. Nad loovad ultra-kõrge kvaliteediga pildi, minimaalse viivitusega pikamaa
Sissejuhatus mehhatroonikasse MHK0120
 Sissejuhatus mehhatroonikasse MHK0120 5. nädala loeng Raavo Josepson raavo.josepson@ttu.ee Pöördliikumine Kulgliikumine Kohavektor Ԧr Kiirus Ԧv = d Ԧr dt Kiirendus Ԧa = dv dt Pöördliikumine Pöördenurk
Sissejuhatus mehhatroonikasse MHK0120 5. nädala loeng Raavo Josepson raavo.josepson@ttu.ee Pöördliikumine Kulgliikumine Kohavektor Ԧr Kiirus Ԧv = d Ԧr dt Kiirendus Ԧa = dv dt Pöördliikumine Pöördenurk
遥控器使用说明书(ROHS) ALPA-CS349-R09D(E)-0301(内容)
 ALPA-CS349-R09D(E)-0301(内容)") KASUTUSJUHEND SIIRDATAV KDITSIEER KAUGJUHTIMISPULDI KASUTUSJUHEND AM-5PR(N) Täname teid, et olete soetanud endale meie õhukonditsioneeri Palun lugege hoolikalt käesolevat kasutusjuhendit enne seadme kasutamist
KASUTUSJUHEND SIIRDATAV KDITSIEER KAUGJUHTIMISPULDI KASUTUSJUHEND AM-5PR(N) Täname teid, et olete soetanud endale meie õhukonditsioneeri Palun lugege hoolikalt käesolevat kasutusjuhendit enne seadme kasutamist
Microsoft Word - Keypad-controller-manual-new_1.docx
 Eraldiseisev ühe ukse juurdepääsukontroller Kasutusjuhend Enne seadme paigaldamist ja kasutamist lugege tähelepanelikult seda juhendit 1. Pakkeleht Nimi Kogus Märkused Sõrmistik 1 Kasutusjuhend 1 Kruvikeeraja
Eraldiseisev ühe ukse juurdepääsukontroller Kasutusjuhend Enne seadme paigaldamist ja kasutamist lugege tähelepanelikult seda juhendit 1. Pakkeleht Nimi Kogus Märkused Sõrmistik 1 Kasutusjuhend 1 Kruvikeeraja
Tarkvaraline raadio Software defined radio (SDR) Jaanus Kalde 2017
 Jaanus Kalde 2017") Tarkvaraline raadio Software defined radio (SDR) Jaanus Kalde 2017 Sissejuhatus Raadiosidest üldiselt Tarkvaraline raadio Kuidas alustada 2 Raadioside Palju siinussignaale õhus Info edastamiseks moduleerid
Tarkvaraline raadio Software defined radio (SDR) Jaanus Kalde 2017 Sissejuhatus Raadiosidest üldiselt Tarkvaraline raadio Kuidas alustada 2 Raadioside Palju siinussignaale õhus Info edastamiseks moduleerid
Juhend nutiterminali seadistamiseks ja kaardimaksete vastuvõtmiseks Ingenico Link/2500 ja icmp
 Juhend nutiterminali seadistamiseks ja kaardimaksete vastuvõtmiseks Ingenico Link/2500 ja icmp Terminali seadistamine Lülita telefonis või tahvelarvutis (edaspidi telefonis) sisse Bluetooth. (1) 1 1 Mudel
Juhend nutiterminali seadistamiseks ja kaardimaksete vastuvõtmiseks Ingenico Link/2500 ja icmp Terminali seadistamine Lülita telefonis või tahvelarvutis (edaspidi telefonis) sisse Bluetooth. (1) 1 1 Mudel
Microsoft Word - Bose_SoundLink_around-ear_Kasutusjuhend.docx
 Bose SoundLink Around- ear II Kõrvaklapid ETTEVAATUSABINÕUD Pikaajaline vali heli võib kahjustada Teie kõrvakuulmist. Vältige kõrvaklappide kasutamist autoga sõitmise ajal. Kõrvaklappide ohutuimaks kasutamiseks
Bose SoundLink Around- ear II Kõrvaklapid ETTEVAATUSABINÕUD Pikaajaline vali heli võib kahjustada Teie kõrvakuulmist. Vältige kõrvaklappide kasutamist autoga sõitmise ajal. Kõrvaklappide ohutuimaks kasutamiseks
JABRA STYLE Kasutusjuhend jabra.com/style
 Kasutusjuhend jabra.com/style SISUKORD 1. TERE TULEMAST... 3 2. PEAKOMPLEKT... 4 3. KANDMINE... 5 3.1 KUULARIKATETE VAHETAMINE 4. AKU LAADIMINE... 6 5. ÜHENDAMINE... 7 5.1 BLUETOOTH SEADMEGA ÜHENDAMINE
Kasutusjuhend jabra.com/style SISUKORD 1. TERE TULEMAST... 3 2. PEAKOMPLEKT... 4 3. KANDMINE... 5 3.1 KUULARIKATETE VAHETAMINE 4. AKU LAADIMINE... 6 5. ÜHENDAMINE... 7 5.1 BLUETOOTH SEADMEGA ÜHENDAMINE
KIIRJUHEND Lugege kiirjuhend enne seadme kasutamist hoolikalt läbi. Kõik tärniga (*) märgitud juhised kehtivad WLAN + 3G mudelitele (Lenovo B6000-H(V)
 märgitud juhised kehtivad WLAN + 3G mudelitele (Lenovo B6000-H(V)") KIIRJUHEND Lugege kiirjuhend enne seadme kasutamist hoolikalt läbi. Kõik tärniga (*) märgitud juhised kehtivad WLAN + 3G mudelitele (Lenovo B6000-H(V) / Lenovo B8000-H). Tehnilised andmed Mudeli nimetus
KIIRJUHEND Lugege kiirjuhend enne seadme kasutamist hoolikalt läbi. Kõik tärniga (*) märgitud juhised kehtivad WLAN + 3G mudelitele (Lenovo B6000-H(V) / Lenovo B8000-H). Tehnilised andmed Mudeli nimetus
Microsoft Word - HEOS 1 kasutusjuhend EST.docx
 HEOS 1 Seadistamise kiirjuhend http://www.denon.ee/?op=body&id=169 http://www.tophifi.ee/ https://www.facebook.com/tophifi.ee ENNE, KUI ALUSTATE Veenduge, et kõik alljärgnev on töökorras: 1. SAMM: LAHTIPAKKIMINE
HEOS 1 Seadistamise kiirjuhend http://www.denon.ee/?op=body&id=169 http://www.tophifi.ee/ https://www.facebook.com/tophifi.ee ENNE, KUI ALUSTATE Veenduge, et kõik alljärgnev on töökorras: 1. SAMM: LAHTIPAKKIMINE
CPA4164 USB 2.0 kõrgekvaliteediline videoadapter KASUTUSJUHEND 1. PEATÜKK - Ülevaade 1.1 Tutvustus CPA4164 USB 2.0 videoadapter võimaldab teil arvutis
 CPA4164 USB 2.0 kõrgekvaliteediline videoadapter KASUTUSJUHEND 1. PEATÜKK - Ülevaade 1.1 Tutvustus CPA4164 USB 2.0 videoadapter võimaldab teil arvutisse laadida ja redigeerida erinevatest analoogvideo
CPA4164 USB 2.0 kõrgekvaliteediline videoadapter KASUTUSJUHEND 1. PEATÜKK - Ülevaade 1.1 Tutvustus CPA4164 USB 2.0 videoadapter võimaldab teil arvutisse laadida ja redigeerida erinevatest analoogvideo
RVT_ DC-Arctic, 1, en_GB
 Kasutusjuhend RVT 64 DC, RVT 354 DC, RVT 54 DC, RVT 684 DC Kasutusjuhend Üldteave Siseseadet saab hõlpsalt kasutada infrapunakaugjuhtimispuldiga. Siseseade annab õigest andmeedastusest teada helisignaaliga.
Kasutusjuhend RVT 64 DC, RVT 354 DC, RVT 54 DC, RVT 684 DC Kasutusjuhend Üldteave Siseseadet saab hõlpsalt kasutada infrapunakaugjuhtimispuldiga. Siseseade annab õigest andmeedastusest teada helisignaaliga.
Control no:
 Smart Access Driftsprocedure A. Eeltingimused... 2 1. Nutitelefoni ühilduvus... 2 2. Kaabli valik... 2 a. Apple devices (Apple'i seadmed) (iphone 4/4S)... 2 b. Apple devices (Apple'i seadmed) (iphone 5/5c/5s)...
Smart Access Driftsprocedure A. Eeltingimused... 2 1. Nutitelefoni ühilduvus... 2 2. Kaabli valik... 2 a. Apple devices (Apple'i seadmed) (iphone 4/4S)... 2 b. Apple devices (Apple'i seadmed) (iphone 5/5c/5s)...
Taskuprinter KASUTUSJUHEND
 Taskuprinter KASUTUSJUHEND Täname, et ostsite taskuprinteri Polaroid Mint. Käesoleva kasutusjuhendi eesmärk on anda teile juhiseid toote ohutuks kasutamiseks ja et see ei kujutaks endast kasutajale mingit
Taskuprinter KASUTUSJUHEND Täname, et ostsite taskuprinteri Polaroid Mint. Käesoleva kasutusjuhendi eesmärk on anda teile juhiseid toote ohutuks kasutamiseks ja et see ei kujutaks endast kasutajale mingit
Väärtusta oma vabadust. Eesti Yale Seifide Kasutusjuhend Mudelid: YSB/200/EB1 YSB/250/EB1 YSB/400/EB1 YLB/200/EB1 YSM/250/EG1 YSM/400/EG1 YSM/520/EG1
 Väärtusta oma vabadust. Eesti Yale Seifide Kasutusjuhend Mudelid: YSB/200/EB1 YSB/250/EB1 YSB/400/EB1 YLB/200/EB1 YSM/250/EG1 YSM/400/EG1 YSM/520/EG1 YLM/200/EG1 Soovitame selle kasutusjuhendi alles hoida.
Väärtusta oma vabadust. Eesti Yale Seifide Kasutusjuhend Mudelid: YSB/200/EB1 YSB/250/EB1 YSB/400/EB1 YLB/200/EB1 YSM/250/EG1 YSM/400/EG1 YSM/520/EG1 YLM/200/EG1 Soovitame selle kasutusjuhendi alles hoida.
View PDF
 Fitbit Ionic - ikoonilisest nutikellast natuke puudu, kuid spordiks ja kontoriks käib 11. aprill 2018-1:27 Autor: Kaido Einama Fitbiti nutikellad on balansseerinud pulsikella ja nutikella piiril ning viimasel
Fitbit Ionic - ikoonilisest nutikellast natuke puudu, kuid spordiks ja kontoriks käib 11. aprill 2018-1:27 Autor: Kaido Einama Fitbiti nutikellad on balansseerinud pulsikella ja nutikella piiril ning viimasel
Devilink PR Pistikuga relee Paigaldusjuhend EE
 Devilink PR Pistikuga relee Paigaldusjuhend EE devireg 550 22.0 22.0 devireg 550 1. Kasutamine Devilink PR Devilink PR (Pistikuga relee) on seade kütteseadmete või muude elektriseadmete sisse/välja lülitamiseks
Devilink PR Pistikuga relee Paigaldusjuhend EE devireg 550 22.0 22.0 devireg 550 1. Kasutamine Devilink PR Devilink PR (Pistikuga relee) on seade kütteseadmete või muude elektriseadmete sisse/välja lülitamiseks
Mida räägivad logid programmeerimisülesande lahendamise kohta? Heidi Meier
 Mida räägivad logid programmeerimisülesande lahendamise kohta? Heidi Meier 09.02.2019 Miks on ülesannete lahendamise käigu kohta info kogumine oluline? Üha rohkem erinevas eas inimesi õpib programmeerimist.
Mida räägivad logid programmeerimisülesande lahendamise kohta? Heidi Meier 09.02.2019 Miks on ülesannete lahendamise käigu kohta info kogumine oluline? Üha rohkem erinevas eas inimesi õpib programmeerimist.
Caterpillar Inc. 100 NE Adams Street, Peoria, IL USA Meedianumber U9NE8460 Tegevusdokument Lisateave GRADE süsteemi komponentide nõuetele vastav
 Tegevusdokument Lisateave GRADE süsteemi komponentide nõuetele vastavuse teave 1 Sisukord lk Ohutusmärgid ja -sildid... 3 Ohutusteated... 4 Muud sildid... 5 Üldine ohuteave... 6 Edastamine... 6 Sissejuhatus...
Tegevusdokument Lisateave GRADE süsteemi komponentide nõuetele vastavuse teave 1 Sisukord lk Ohutusmärgid ja -sildid... 3 Ohutusteated... 4 Muud sildid... 5 Üldine ohuteave... 6 Edastamine... 6 Sissejuhatus...
SPORTident Air+
 Tarmo Klaar 2012-2013 Esimene koolitus Eestis 2012, Põlvas Ülevaade Uus riistvara Vana tarkvara Proovime kasutada, näited Põhineb hetkel teadaoleval funktsionaalsusel. Tootja ei ole veel lõplikku versiooni
Tarmo Klaar 2012-2013 Esimene koolitus Eestis 2012, Põlvas Ülevaade Uus riistvara Vana tarkvara Proovime kasutada, näited Põhineb hetkel teadaoleval funktsionaalsusel. Tootja ei ole veel lõplikku versiooni
Microsoft Word _08_D7_RU_ET--1530_kujundatud.doc
 KASUTUSJUHEND TAIMERIGA JUHTSEADE JA ELEKTROONILISED SIDEMOODULID EST KIRJELDUS Termostaadid ja juhtseade on juhtmeta ühenduses, kasutades aktiivantenni. Tegevusraadius kinnises ruumis on umbes 50 m. Nädalaprogramm.
KASUTUSJUHEND TAIMERIGA JUHTSEADE JA ELEKTROONILISED SIDEMOODULID EST KIRJELDUS Termostaadid ja juhtseade on juhtmeta ühenduses, kasutades aktiivantenni. Tegevusraadius kinnises ruumis on umbes 50 m. Nädalaprogramm.
Technology Esimene PowerSense tehnoloogiaga elektromehaaniline tööriist
 www.klauke.com Technology Esimene PowerSense tehnoloogiaga elektromehaaniline tööriist Ajad muutuvad. Kompaktne ja maksimaalselt tõhus Kõikjal kus vaja kiiret, kergekaalulist ja effektiivset tööriista
www.klauke.com Technology Esimene PowerSense tehnoloogiaga elektromehaaniline tööriist Ajad muutuvad. Kompaktne ja maksimaalselt tõhus Kõikjal kus vaja kiiret, kergekaalulist ja effektiivset tööriista
Estonian_TBW-106UB(V1).cdr
.cdr") Lühike paigaldusjuhend TBW-106UB H/W: V1 Sisukord... 1 1. Enne alustamist... 1 2. Kuidas paigaldada... 3. Bluetooth adapteriseadistamine... 2 5 Tõrkeotsing... 7 Version 02.17.2009 1. Enne alustamist Pakendi
Lühike paigaldusjuhend TBW-106UB H/W: V1 Sisukord... 1 1. Enne alustamist... 1 2. Kuidas paigaldada... 3. Bluetooth adapteriseadistamine... 2 5 Tõrkeotsing... 7 Version 02.17.2009 1. Enne alustamist Pakendi
Microsoft Word - DB2_TECEfloor Raumthermostat Analog_EN_est
 1 TECEfloori toatermostaat Analog (RT-A ja RT-A HK) TECEfloori toatermostaat Analog on kvaliteetne toatermostaat ruumi temperatuuri registreerimiseks ja muuutmiseks ning pakub maksimaalset kasutusmugavust.
1 TECEfloori toatermostaat Analog (RT-A ja RT-A HK) TECEfloori toatermostaat Analog on kvaliteetne toatermostaat ruumi temperatuuri registreerimiseks ja muuutmiseks ning pakub maksimaalset kasutusmugavust.
Tehniline andmeleht Sadulventiilid (PN 16) VRG 2 2-tee ventiil, väliskeermega VRG 3 3-tee ventiil, väliskeermega Kirjeldus Ventiilid on kasutatavad ko
 VRG 2 2-tee ventiil, väliskeermega VRG 3 3-tee ventiil, väliskeermega Kirjeldus Ventiilid on kasutatavad ko") Tehniline andmeleht Sadulventiilid (PN 16) VRG 2 2-tee ventiil, väliskeermega VRG 3 3-tee ventiil, väliskeermega Kirjeldus Ventiilid on kasutatavad koos AMV(E) 335, AMV(E) 435 ja AMV(E) 438 SU täiturmootoritega.
Tehniline andmeleht Sadulventiilid (PN 16) VRG 2 2-tee ventiil, väliskeermega VRG 3 3-tee ventiil, väliskeermega Kirjeldus Ventiilid on kasutatavad koos AMV(E) 335, AMV(E) 435 ja AMV(E) 438 SU täiturmootoritega.
Ülaveeris
 SÕIDUKI PILDISTAMISE JUHEND Sõiduki pildistamisel tuleb järgida allpool esitatud nõudeid. Nõutavate fotode näidised on juhendis. 1. Üldnõuded 1.1. Peale sõiduki tuleb fotol jäädvustada ka fotode saatmise
SÕIDUKI PILDISTAMISE JUHEND Sõiduki pildistamisel tuleb järgida allpool esitatud nõudeid. Nõutavate fotode näidised on juhendis. 1. Üldnõuded 1.1. Peale sõiduki tuleb fotol jäädvustada ka fotode saatmise
Microsoft Word - Toetuste veebikaardi juhend
 Toetuste veebikaardi juhend Toetuste veebikaardi ülesehitus Joonis 1 Toetuste veebikaardi vaade Toetuste veebikaardi vaade jaguneb tinglikult kaheks: 1) Statistika valikute osa 2) Kaardiaken Statistika
Toetuste veebikaardi juhend Toetuste veebikaardi ülesehitus Joonis 1 Toetuste veebikaardi vaade Toetuste veebikaardi vaade jaguneb tinglikult kaheks: 1) Statistika valikute osa 2) Kaardiaken Statistika
HD 13/12-4 ST Ruumisäästlikud, statsionaarsed kõrgsurvepesurid Kärcherilt, millel on kuni 6 varustuspunkti, mida saab vastavalt vajadusele individuaal
 Ruumisäästlikud, statsionaarsed kõrgsurvepesurid Kärcherilt, millel on kuni 6 varustuspunkti, mida saab vastavalt vajadusele individuaalselt konfigureerida, ning mis on äärmiselt kulumiskindlad. 1 2 3
Ruumisäästlikud, statsionaarsed kõrgsurvepesurid Kärcherilt, millel on kuni 6 varustuspunkti, mida saab vastavalt vajadusele individuaalselt konfigureerida, ning mis on äärmiselt kulumiskindlad. 1 2 3
G TECTA 4G mitme gaasi detektor EE Lühijuhend
 G TECTA 4G mitme gaasi detektor Lühijuhend 2 Sisukord Ohutus- ning ettevaatusabinõud 2 Karbi sisu 3 Toote ülevaade 3 Toote omadused 3 Akude kontrollimine 4 Sisselülitamine 4 G-TECTA 4G käivitusprotsess
G TECTA 4G mitme gaasi detektor Lühijuhend 2 Sisukord Ohutus- ning ettevaatusabinõud 2 Karbi sisu 3 Toote ülevaade 3 Toote omadused 3 Akude kontrollimine 4 Sisselülitamine 4 G-TECTA 4G käivitusprotsess
E-arvete juhend
 E- arvete seadistamine ja saatmine Omniva kaudu Standard Books 7.2 põhjal Mai 2015 Sisukord Sissejuhatus... 3 Seadistamine... 3 Registreerimine... 4 E- arve konto... 5 Vastuvõtu eelistus... 5 Valik E-
E- arvete seadistamine ja saatmine Omniva kaudu Standard Books 7.2 põhjal Mai 2015 Sisukord Sissejuhatus... 3 Seadistamine... 3 Registreerimine... 4 E- arve konto... 5 Vastuvõtu eelistus... 5 Valik E-
Õppematerjalide esitamine Moodle is (alustajatele) seminar sarjas Lõunatund e-õppega 12. septembril 2017 õppedisainerid Ly Sõõrd (LT valdkond) ja Dian
 seminar sarjas Lõunatund e-õppega 12. septembril 2017 õppedisainerid Ly Sõõrd (LT valdkond) ja Dian") Õppematerjalide esitamine Moodle is (alustajatele) seminar sarjas Lõunatund e-õppega 12. septembril 2017 õppedisainerid Ly Sõõrd (LT valdkond) ja Diana Lõvi (SV valdkond) Järgmised e-lõunad: 10. oktoober
Õppematerjalide esitamine Moodle is (alustajatele) seminar sarjas Lõunatund e-õppega 12. septembril 2017 õppedisainerid Ly Sõõrd (LT valdkond) ja Diana Lõvi (SV valdkond) Järgmised e-lõunad: 10. oktoober
View PDF
 Galaxy XCover 4 purunematu nutitelefon neile, kellel midagi juba katki läinud 26. märts 2017-19:25 Autor: AM Kestvustelefonidega on tavaliselt see lugu, et nende poole hakatakse vaatama siis, kui oled
Galaxy XCover 4 purunematu nutitelefon neile, kellel midagi juba katki läinud 26. märts 2017-19:25 Autor: AM Kestvustelefonidega on tavaliselt see lugu, et nende poole hakatakse vaatama siis, kui oled
SAF 7 demo paigaldus. 1.Eeldused SAF 7 demo vajab 32- või 64-bitist Windows 7, Window 8, Windows 10, Windows Server 2008 R2, Windows Server 2012, Wind
 SAF 7 demo paigaldus. 1.Eeldused SAF 7 demo vajab 32- või 64-bitist Windows 7, Window 8, Windows 10, Windows Server 2008 R2, Windows Server 2012, Windows Server 2012 R2, Windows Server 2016 või Windows
SAF 7 demo paigaldus. 1.Eeldused SAF 7 demo vajab 32- või 64-bitist Windows 7, Window 8, Windows 10, Windows Server 2008 R2, Windows Server 2012, Windows Server 2012 R2, Windows Server 2016 või Windows
MAKING MODERN LIVING POSSIBLE Keskne juhtimine Palju võimalusi kokkuhoiuks. 2- suunaline teabeedastus Danfoss Link s kahesuunaline teabeedastus annab
 MAKING MODERN LIVING POSSIBLE Keskne juhtimine Palju võimalusi kokkuhoiuks. 2- suunaline teabeedastus s kahesuunaline teabeedastus annab paigaldamise ajal täiusliku süsteemidiagnostika selleks, et kõik
MAKING MODERN LIVING POSSIBLE Keskne juhtimine Palju võimalusi kokkuhoiuks. 2- suunaline teabeedastus s kahesuunaline teabeedastus annab paigaldamise ajal täiusliku süsteemidiagnostika selleks, et kõik
KASUTUSJUHEND
 KASUTUSJUHEND Sissejuhatus Kui valvesüsteem on valvessepanekuks valmis ning puuduvad rikke- ning häireteated, kuvatakse sõrmistiku displeil kellaaeg, kuupäev ning tekst Enter Your Code sisestage kood Peale
KASUTUSJUHEND Sissejuhatus Kui valvesüsteem on valvessepanekuks valmis ning puuduvad rikke- ning häireteated, kuvatakse sõrmistiku displeil kellaaeg, kuupäev ning tekst Enter Your Code sisestage kood Peale
VANASÕIDUKIKS TUNNUSTAMISE AKT Nr 62 Sõiduki olulised andmed Sõiduki mark Husqvarna Vanasõiduki klass Mudel ja modifikatsioon 282E Silverpil Värvus hõ
 VANASÕIDUKIKS TUNNUSTAMISE AKT Nr 62 Sõiduki olulised andmed Sõiduki mark Husqvarna Vanasõiduki klass Mudel ja modifikatsioon 282E Silverpil Värvus hõbehall Tehasetähis (VINkood) Valmistajamaa Rootsi Esmane
VANASÕIDUKIKS TUNNUSTAMISE AKT Nr 62 Sõiduki olulised andmed Sõiduki mark Husqvarna Vanasõiduki klass Mudel ja modifikatsioon 282E Silverpil Värvus hõbehall Tehasetähis (VINkood) Valmistajamaa Rootsi Esmane
B660 Kiirjuhend Märkus: Selles juhendis olevad joonised on ainult teabeks. Oma konkreetse mudeli kohta käivate üksikasjade teada saamiseks pöörduge om
 B660 Kiirjuhend Selles juhendis olevad joonised on ainult teabeks. Oma konkreetse mudeli kohta käivate üksikasjade teada saamiseks pöörduge oma teenusepakkuja poole. Seadet ostes kontrollige toote ja selle
B660 Kiirjuhend Selles juhendis olevad joonised on ainult teabeks. Oma konkreetse mudeli kohta käivate üksikasjade teada saamiseks pöörduge oma teenusepakkuja poole. Seadet ostes kontrollige toote ja selle
Mehhatroonikainstituut Mehhatroonikasüsteemide õppetool MHK40LT Lauri Leemet ANDMEHÕIVESÜSTEEM PURJELAUALE Bakalaureusetöö Autor taotleb tehnikateadus
 Mehhatroonikainstituut Mehhatroonikasüsteemide õppetool MHK40LT Lauri Leemet ANDMEHÕIVESÜSTEEM PURJELAUALE Bakalaureusetöö Autor taotleb tehnikateaduste bakalaureuse akadeemilist kraadi Tallinn 2014 AUTORIDEKLARATSIOON
Mehhatroonikainstituut Mehhatroonikasüsteemide õppetool MHK40LT Lauri Leemet ANDMEHÕIVESÜSTEEM PURJELAUALE Bakalaureusetöö Autor taotleb tehnikateaduste bakalaureuse akadeemilist kraadi Tallinn 2014 AUTORIDEKLARATSIOON
Microsoft Word - TM70_SP-MG_kasutusjuhend.docx
 TM70 Touch-i kasutusjuhend Süsteemid: Magellan ja Spectra SP Põhiekraan Kuupäev/kellaaeg Välis-/sisetemperatuur Süsteemi olek Tsoonid Menüü Info OneScreen Monitoring SpotOn Locator Slaidiesitus Paanika-häire
TM70 Touch-i kasutusjuhend Süsteemid: Magellan ja Spectra SP Põhiekraan Kuupäev/kellaaeg Välis-/sisetemperatuur Süsteemi olek Tsoonid Menüü Info OneScreen Monitoring SpotOn Locator Slaidiesitus Paanika-häire
VRG 2, VRG 3
 Tehniline andmeleht Sadulventiilid (PN 16) 2-tee ventiil, väliskeermega 3-tee ventiil, väliskeermega Kirjeldus Omadused Mullikindel konstruktsioon Mehhaaniline snepperühendus täiturmootoriga MV(E) 335,
Tehniline andmeleht Sadulventiilid (PN 16) 2-tee ventiil, väliskeermega 3-tee ventiil, väliskeermega Kirjeldus Omadused Mullikindel konstruktsioon Mehhaaniline snepperühendus täiturmootoriga MV(E) 335,
efo09v2pke.dvi
 Eesti koolinoorte 56. füüsikaolümpiaad 17. jaanuar 2009. a. Piirkondlik voor. Põhikooli ülesanded 1. (VÄRVITILGAD LAUAL) Ühtlaselt ja sirgjooneliselt liikuva horisontaalse laua kohal on kaks paigalseisvat
Eesti koolinoorte 56. füüsikaolümpiaad 17. jaanuar 2009. a. Piirkondlik voor. Põhikooli ülesanded 1. (VÄRVITILGAD LAUAL) Ühtlaselt ja sirgjooneliselt liikuva horisontaalse laua kohal on kaks paigalseisvat
Tartu Ülikool
 Tartu Ülikool Code coverage Referaat Koostaja: Rando Mihkelsaar Tartu 2005 Sissejuhatus Inglise keelne väljend Code coverage tähendab eesti keeles otse tõlgituna koodi kaetust. Lahti seletatuna näitab
Tartu Ülikool Code coverage Referaat Koostaja: Rando Mihkelsaar Tartu 2005 Sissejuhatus Inglise keelne väljend Code coverage tähendab eesti keeles otse tõlgituna koodi kaetust. Lahti seletatuna näitab
Kom igang med Scratch
 Alustame algusest Getting Started versioon 1.4 SCRATCH on uus programmeerimiskeel, mis lubab sul endal luua interaktiivseid annimatsioone, lugusid, mänge, muusikat, taieseid jm Scratch'i saab kasutada
Alustame algusest Getting Started versioon 1.4 SCRATCH on uus programmeerimiskeel, mis lubab sul endal luua interaktiivseid annimatsioone, lugusid, mänge, muusikat, taieseid jm Scratch'i saab kasutada
I klassi õlipüüdur kasutusjuhend
 I-KLASSI ÕLIPÜÜDURITE PAIGALDUS- JA HOOLDUSJUHEND PÜÜDURI DEFINITSIOON JPR -i õlipüüdurite ülesandeks on sadevee või tööstusliku heitvee puhastamine heljumist ja õlijääkproduktidest. Püüduri ülesehitus
I-KLASSI ÕLIPÜÜDURITE PAIGALDUS- JA HOOLDUSJUHEND PÜÜDURI DEFINITSIOON JPR -i õlipüüdurite ülesandeks on sadevee või tööstusliku heitvee puhastamine heljumist ja õlijääkproduktidest. Püüduri ülesehitus
Microsoft Word - QOS_2008_Tallinn_OK.doc
 GSM mobiiltelefoniteenuse kvaliteet Tallinnas, juuni 2008 Sideteenuste osakond 2008 Kvaliteedist üldiselt GSM mobiiltelefonivõrgus saab mõõta kümneid erinevaid tehnilisi parameetreid ja nende kaudu võrku
GSM mobiiltelefoniteenuse kvaliteet Tallinnas, juuni 2008 Sideteenuste osakond 2008 Kvaliteedist üldiselt GSM mobiiltelefonivõrgus saab mõõta kümneid erinevaid tehnilisi parameetreid ja nende kaudu võrku
Microsoft Word - requirements.doc
 Dokumendi ajalugu: Versioon Kuupäev Tegevus Autor 1.0 04.03.2008 Dokumendi loomine Madis Abel 1.1 09.03.2008 Kasutuslugude loomine Madis Abel 1.2 12.03.2008 Kasutuslugude täiendused Andres Kalle 1.3 13.03.2008
Dokumendi ajalugu: Versioon Kuupäev Tegevus Autor 1.0 04.03.2008 Dokumendi loomine Madis Abel 1.1 09.03.2008 Kasutuslugude loomine Madis Abel 1.2 12.03.2008 Kasutuslugude täiendused Andres Kalle 1.3 13.03.2008
Võistlusülesanne Vastutuulelaev Finaal
 Võistlusülesanne Vastutuulelaev Finaal CADrina 2016 võistlusülesannete näol on tegemist tekst-pilt ülesannetega, milliste lahendamiseks ei piisa ainult jooniste ülevaatamisest, vaid lisaks piltidele tuleb
Võistlusülesanne Vastutuulelaev Finaal CADrina 2016 võistlusülesannete näol on tegemist tekst-pilt ülesannetega, milliste lahendamiseks ei piisa ainult jooniste ülevaatamisest, vaid lisaks piltidele tuleb
Microsoft PowerPoint - IRZ0050_13L.pptx
 15. Hüdroakustilised d infohankesüsteemid id Kirjandus: Arro I. Sonartehnika, Tln., TTÜ kirjastus, 1998 Otsingu sõna: Sonar + signal processing, echo sounding, underwater acoustics, hydroacoustics, active
15. Hüdroakustilised d infohankesüsteemid id Kirjandus: Arro I. Sonartehnika, Tln., TTÜ kirjastus, 1998 Otsingu sõna: Sonar + signal processing, echo sounding, underwater acoustics, hydroacoustics, active
EST_QIG_TEW-424UB(V3.1.1).cdr
.cdr") Lühike paigaldusjuhend TEW-424UB Sisukord Eesti... 1 1. Enne alustamist... 1 2. Kuidas paigaldada... 2 3. WiFi seadistamine... 4 Tõrkeotsing... 6 Version 12.05.2007 1. Enne alustamist Pakendi sisu TEW-424UB
Lühike paigaldusjuhend TEW-424UB Sisukord Eesti... 1 1. Enne alustamist... 1 2. Kuidas paigaldada... 2 3. WiFi seadistamine... 4 Tõrkeotsing... 6 Version 12.05.2007 1. Enne alustamist Pakendi sisu TEW-424UB
efo03v2pkl.dvi
 Eesti koolinoorte 50. füüsikaolümpiaad 1. veebruar 2003. a. Piirkondlik voor Põhikooli ülesannete lahendused NB! Käesoleval lahendustelehel on toodud iga ülesande üks õige lahenduskäik. Kõik alternatiivsed
Eesti koolinoorte 50. füüsikaolümpiaad 1. veebruar 2003. a. Piirkondlik voor Põhikooli ülesannete lahendused NB! Käesoleval lahendustelehel on toodud iga ülesande üks õige lahenduskäik. Kõik alternatiivsed
Microsoft Word - Vx610 EMV KASUTUSJUHEND.doc
 MAKSETERMINALI KASUTUSJUHEND VERIFONE Vx610 GSM Kliendiabi: (0) 6711 444 (kõik nädalapäevad 24 h) Makseterminalide osakond: (0) 6711 411 (tööpäeviti kell 9.00 17.00) Faks: (0) 6711 420 Email: posgrupp@estcard.ee
MAKSETERMINALI KASUTUSJUHEND VERIFONE Vx610 GSM Kliendiabi: (0) 6711 444 (kõik nädalapäevad 24 h) Makseterminalide osakond: (0) 6711 411 (tööpäeviti kell 9.00 17.00) Faks: (0) 6711 420 Email: posgrupp@estcard.ee
Microsoft Word - 56ylesanded1415_lõppvoor
 1. 1) Iga tärnike tuleb asendada ühe numbriga nii, et tehe oleks õige. (Kolmekohaline arv on korrutatud ühekohalise arvuga ja tulemuseks on neljakohaline arv.) * * 3 * = 2 * 1 5 Kas on õige, et nii on
1. 1) Iga tärnike tuleb asendada ühe numbriga nii, et tehe oleks õige. (Kolmekohaline arv on korrutatud ühekohalise arvuga ja tulemuseks on neljakohaline arv.) * * 3 * = 2 * 1 5 Kas on õige, et nii on
HCB_hinnakiri2017_kodukale
 Betooni baashinnakiri Hinnakiri kehtib alates 01.04.2016 Töödeldavus S3 Töödeldavus S4 / m 3 /m 3 km-ga / m 3 /m 3 km-ga C 8/10 69 83 71 85 C 12/15 73 88 75 90 C 16/20 75 90 77 92 C 20/25 78 94 80 96 C
Betooni baashinnakiri Hinnakiri kehtib alates 01.04.2016 Töödeldavus S3 Töödeldavus S4 / m 3 /m 3 km-ga / m 3 /m 3 km-ga C 8/10 69 83 71 85 C 12/15 73 88 75 90 C 16/20 75 90 77 92 C 20/25 78 94 80 96 C
Antennide vastastikune takistus
 Antennide vastastikune takistus Eelmises peatükis leidsime antenni kiirgustakistuse arvestamata antenni lähedal teisi objekte. Teised objektid, näiteks teised antennielemendid, võivad aga mõjutada antenni
Antennide vastastikune takistus Eelmises peatükis leidsime antenni kiirgustakistuse arvestamata antenni lähedal teisi objekte. Teised objektid, näiteks teised antennielemendid, võivad aga mõjutada antenni
MS Word Sisukord Uue dokumendi loomine... 2 Dokumendi salvestamine... 3 Faili nimi... 4 Teksti sisestamine... 6 Klaviatuuril mitteleiduvat sümbolite l
 MS Word Sisukord Uue dokumendi loomine... 2 Dokumendi salvestamine... 3 Faili nimi... 4 Teksti sisestamine... 6 Klaviatuuril mitteleiduvat sümbolite lisamine... 6 Uue dokumendi loomine Dokumendi salvestamine
MS Word Sisukord Uue dokumendi loomine... 2 Dokumendi salvestamine... 3 Faili nimi... 4 Teksti sisestamine... 6 Klaviatuuril mitteleiduvat sümbolite lisamine... 6 Uue dokumendi loomine Dokumendi salvestamine
VRB 2, VRB 3
 Tehniline andmeleht Sadulventiilid (PN 6) VR - tee ventiil, sise- ja väliskeere 3-tee ventiil, sise- ja väliskeere Kirjeldus Omadused Mullikindel konstruktsioon Mehaaniline snepperühendus täiturmootoriga
Tehniline andmeleht Sadulventiilid (PN 6) VR - tee ventiil, sise- ja väliskeere 3-tee ventiil, sise- ja väliskeere Kirjeldus Omadused Mullikindel konstruktsioon Mehaaniline snepperühendus täiturmootoriga
RK-2001AT2-ENG_AC22.kmd
 KASUTUSJUHEND RK-2001AT2 TAHKEKÜTUSEL TÖÖTAVA KATLA TEMPERATUURIKONTROLLER Versioon AC22 Toote ajalugu: Kuupäev Versioon Muudatused 2010-08-03 A803 Suitsugaaside termostaat on vaid kütuse lõppemise tuvastamiseks
KASUTUSJUHEND RK-2001AT2 TAHKEKÜTUSEL TÖÖTAVA KATLA TEMPERATUURIKONTROLLER Versioon AC22 Toote ajalugu: Kuupäev Versioon Muudatused 2010-08-03 A803 Suitsugaaside termostaat on vaid kütuse lõppemise tuvastamiseks
Slide 1
 ERAÜ XVII TALVEPÄEV 2015 Uue põlvkonna LDMOS transistorvõimendid 14.veebruar 2015 Mart Tagasaar, ES2NJ Sissejuhatus Alates 2010.aastast on turule ilmunud uue põlvkonna LDMOS transistorid võimsusega 600-1400W,
ERAÜ XVII TALVEPÄEV 2015 Uue põlvkonna LDMOS transistorvõimendid 14.veebruar 2015 Mart Tagasaar, ES2NJ Sissejuhatus Alates 2010.aastast on turule ilmunud uue põlvkonna LDMOS transistorid võimsusega 600-1400W,
Tarvikud _ Puhurid ja vaakumpumbad INW külgkanaliga Air and Vacuum Components in-eco.co.ee
 Tarvikud _ Puhurid ja vaakumpumbad INW külgkanaliga Air and Vacuum Components in-eco.co.ee IN-ECO, spol. s r.o. Radlinského 13 T +421 44 4304662 F +421 44 4304663 E info@in-eco.sk Õhufiltrid integreeritud
Tarvikud _ Puhurid ja vaakumpumbad INW külgkanaliga Air and Vacuum Components in-eco.co.ee IN-ECO, spol. s r.o. Radlinského 13 T +421 44 4304662 F +421 44 4304663 E info@in-eco.sk Õhufiltrid integreeritud
Dias nummer 1
 TEHNOLOOGIATE JA TARKVARA KASUTAMINE TÄPPISVILJELUSES Kristjan Ruusamäe, Haakeseadmete tootejuht, Baltic Agro Machinery OÜ TÄPPISVILJELUS 100 AASTAT TAGASI VS. TÄNAPÄEV PÕLLUMAJANDUSE ARENGUETAPID PÕLLUMAJANDUS
TEHNOLOOGIATE JA TARKVARA KASUTAMINE TÄPPISVILJELUSES Kristjan Ruusamäe, Haakeseadmete tootejuht, Baltic Agro Machinery OÜ TÄPPISVILJELUS 100 AASTAT TAGASI VS. TÄNAPÄEV PÕLLUMAJANDUSE ARENGUETAPID PÕLLUMAJANDUS
Elisa Ring Elisa Ringi mobiilirakendus Versioon
 Elisa Ring Elisa Ringi mobiilirakendus Versioon 1.0.85 15.01.2019 1 Elisa Ring... 1 1. Ülevaade... 3 1.1. Kirjeldus... 3 1.2. Tehnilised tingimused... 3 1.3. Kasutuselevõtt ja sisselogimine... 3 2. Rakenduse
Elisa Ring Elisa Ringi mobiilirakendus Versioon 1.0.85 15.01.2019 1 Elisa Ring... 1 1. Ülevaade... 3 1.1. Kirjeldus... 3 1.2. Tehnilised tingimused... 3 1.3. Kasutuselevõtt ja sisselogimine... 3 2. Rakenduse
Microsoft Word - EVS_ISO_IEC_27001;2014_et_esilehed.doc
 EESTI STANDARD EVS-ISO/IEC 27001:2014 INFOTEHNOLOOGIA Turbemeetodid Infoturbe halduse süsteemid Nõuded Information technology Security techniques Information security management systems Requirements (ISO/IEC
EESTI STANDARD EVS-ISO/IEC 27001:2014 INFOTEHNOLOOGIA Turbemeetodid Infoturbe halduse süsteemid Nõuded Information technology Security techniques Information security management systems Requirements (ISO/IEC
Andmed arvuti mälus Bitid ja baidid
 Andmed arvuti mälus Bitid ja baidid A bit about bit Bitt, (ingl k bit) on info mõõtmise ühik, tuleb mõistest binary digit nö kahendarv kahe võimaliku väärtusega 0 ja 1. Saab näidata kahte võimalikku olekut
Andmed arvuti mälus Bitid ja baidid A bit about bit Bitt, (ingl k bit) on info mõõtmise ühik, tuleb mõistest binary digit nö kahendarv kahe võimaliku väärtusega 0 ja 1. Saab näidata kahte võimalikku olekut
1/ Lüliti REVAL BULB 230V, IR puldiga 300W IP20 Tootekood Jaehind 23,32+KM Soodushind 10,00+KM Bränd REVAL BULB Toide 230V Võimsus
 1/32 Lüliti REVAL BULB 230V, IR puldiga 300W IP20 Tootekood 13231 Jaehind 23,32+KM Soodushind 10,00+KM Bränd REVAL BULB Võimsus 300W Kõrgus 87mm Laius 87mm Kaal 174g 0-100% LED dimmer LED Riba 2835 60LED
1/32 Lüliti REVAL BULB 230V, IR puldiga 300W IP20 Tootekood 13231 Jaehind 23,32+KM Soodushind 10,00+KM Bränd REVAL BULB Võimsus 300W Kõrgus 87mm Laius 87mm Kaal 174g 0-100% LED dimmer LED Riba 2835 60LED
AJ3123_12 estonian.cdr
 Registreerige oma toode ja saage tuge www.philips.com/welcome AJ3123 Külastage Philipsit internetis: http://www.philips.com Eestikeelne kasutusjuhend 8. ed Kõik muudatused ja modifikatsioonid, mis pole
Registreerige oma toode ja saage tuge www.philips.com/welcome AJ3123 Külastage Philipsit internetis: http://www.philips.com Eestikeelne kasutusjuhend 8. ed Kõik muudatused ja modifikatsioonid, mis pole
Tartu Kutsehariduskeskus IKT osakond Merlis Karja-Kännaste ASUTUSE DOKUMENDIREGISTRI AVALIK VAADE Analüüs Juhendaja Mirjam-Merike Sõmer Tartu 2015
 Tartu Kutsehariduskeskus IKT osakond Merlis Karja-Kännaste ASUTUSE DOKUMENDIREGISTRI AVALIK VAADE Analüüs Juhendaja Mirjam-Merike Sõmer Tartu 2015 SISUKORD SISSEJUHATUS... 3 1. VILJANDI LINNAVALITSUSE
Tartu Kutsehariduskeskus IKT osakond Merlis Karja-Kännaste ASUTUSE DOKUMENDIREGISTRI AVALIK VAADE Analüüs Juhendaja Mirjam-Merike Sõmer Tartu 2015 SISUKORD SISSEJUHATUS... 3 1. VILJANDI LINNAVALITSUSE
Microsoft Word - EasyFit Touch_ET
 EasyFit Touch aktiivsusmonitor kasutusjuhend Puuteekraaniga aktiivsusmonitor - randmevõru Funktsioonid Kellaaeg Sammulugemine Läbitud vahemaa Kalorid Äratuskell Unejälgimise režiim Märguanne liikumiseks
EasyFit Touch aktiivsusmonitor kasutusjuhend Puuteekraaniga aktiivsusmonitor - randmevõru Funktsioonid Kellaaeg Sammulugemine Läbitud vahemaa Kalorid Äratuskell Unejälgimise režiim Märguanne liikumiseks
Kasutusjuhend Dragon Winch vintsile DWM, DWH, DWT seeria Sisukord Üldised ohutusnõuded... 3 Vintsimise ohutusnõuded... 3 Kasulik teada... 4 Vintsimise
 Kasutusjuhend Dragon Winch vintsile DWM, DWH, DWT seeria Sisukord Üldised ohutusnõuded... 3 Vintsimise ohutusnõuded... 3 Kasulik teada... 4 Vintsimisel on hea teada... 5 Vintsi hooldus... 6 Garantii...
Kasutusjuhend Dragon Winch vintsile DWM, DWH, DWT seeria Sisukord Üldised ohutusnõuded... 3 Vintsimise ohutusnõuded... 3 Kasulik teada... 4 Vintsimisel on hea teada... 5 Vintsi hooldus... 6 Garantii...
HCB_hinnakiri2018_kodukale
 Betooni baashinnakiri Hinnakiri kehtib alates 01.01.2018 Töödeldavus S3 Töödeldavus S4 / m 3 /m 3 km-ga / m 3 /m 3 km-ga C 8/10 73 87 75 89 C 12/15 77 92 79 94 C 16/20 79 94 81 96 C 20/25 82 98 84 100
Betooni baashinnakiri Hinnakiri kehtib alates 01.01.2018 Töödeldavus S3 Töödeldavus S4 / m 3 /m 3 km-ga / m 3 /m 3 km-ga C 8/10 73 87 75 89 C 12/15 77 92 79 94 C 16/20 79 94 81 96 C 20/25 82 98 84 100
Microsoft Word - essee_CVE ___KASVANDIK_MARKKO.docx
 Tartu Ülikool CVE-2013-7040 Referaat aines Andmeturve Autor: Markko Kasvandik Juhendaja : Meelis Roos Tartu 2015 1.CVE 2013 7040 olemus. CVE 2013 7040 sisu seisneb krüptograafilises nõrkuses. Turvaaugu
Tartu Ülikool CVE-2013-7040 Referaat aines Andmeturve Autor: Markko Kasvandik Juhendaja : Meelis Roos Tartu 2015 1.CVE 2013 7040 olemus. CVE 2013 7040 sisu seisneb krüptograafilises nõrkuses. Turvaaugu
Eesti kõrgusmudel
 Meie: 04.06.2002 nr 4-3/3740 Küsimustik Eesti maapinna kõrgusmudeli spetsifikatsioonide selgitamiseks Eestis on juba aastaid tõstatatud küsimus täpse maapinna kõrgusmudeli (edaspidi mudel) koostamisest
Meie: 04.06.2002 nr 4-3/3740 Küsimustik Eesti maapinna kõrgusmudeli spetsifikatsioonide selgitamiseks Eestis on juba aastaid tõstatatud küsimus täpse maapinna kõrgusmudeli (edaspidi mudel) koostamisest
Microsoft Word - XTOP026.doc
 XTOP026 Enne seadme kasutamist lugege kasutusjuhend hoolikalt läbi ja järgige kõiki juhiseid. Hoidke juhend hilisemaks vajaduseks alles. MOOTORRATTA TÕSTUK Kasutusjuhend OLULINE! EST LUGEGE NEED JUHISED
XTOP026 Enne seadme kasutamist lugege kasutusjuhend hoolikalt läbi ja järgige kõiki juhiseid. Hoidke juhend hilisemaks vajaduseks alles. MOOTORRATTA TÕSTUK Kasutusjuhend OLULINE! EST LUGEGE NEED JUHISED
Microsoft Word - Iseseisev töö nr 1 õppeaines.doc
 TALLINNA TEHNIKAÜLIKOOL Raadio- ja sidetehnika instituut Mikrolainetehnika õppetool Iseseisva töö nr 1 juhend õppeaines Sideseadmete mudeldamine Ionosfäärse sidekanali mudeldamine Tallinn 2006 1 Teoreetilised
TALLINNA TEHNIKAÜLIKOOL Raadio- ja sidetehnika instituut Mikrolainetehnika õppetool Iseseisva töö nr 1 juhend õppeaines Sideseadmete mudeldamine Ionosfäärse sidekanali mudeldamine Tallinn 2006 1 Teoreetilised
VL1_praks2_2009s
 Biomeetria praks 2 Illustreeritud (mittetäielik) tööjuhend Eeltöö 1. Avage MS Excel is oma kursuse ankeedivastuseid sisaldav andmestik (see, mida 1. praktikumiski analüüsisite), 2. nimetage Sheet3 ümber
Biomeetria praks 2 Illustreeritud (mittetäielik) tööjuhend Eeltöö 1. Avage MS Excel is oma kursuse ankeedivastuseid sisaldav andmestik (see, mida 1. praktikumiski analüüsisite), 2. nimetage Sheet3 ümber
Pintsli otsade juurde tegemine Esiteks Looge pilt suurusega 64x64 ja tema taustaks olgu läbipaistev kiht (Transparent). Teiseks Minge kihtide (Layers)
. Teiseks Minge kihtide (Layers)") Pintsli otsade juurde tegemine Esiteks Looge pilt suurusega 64x64 ja tema taustaks olgu läbipaistev kiht (Transparent). Teiseks Minge kihtide (Layers) aknasse ja looge kaks läbipaistvat kihti juurde. Pange
Pintsli otsade juurde tegemine Esiteks Looge pilt suurusega 64x64 ja tema taustaks olgu läbipaistev kiht (Transparent). Teiseks Minge kihtide (Layers) aknasse ja looge kaks läbipaistvat kihti juurde. Pange
28 29
 28 29 CARGO TIPPER KÕRGE VÕIMEKUS MADAL RASKUSKESE Iga BJT haagis on konstrueeritud ühte eesmärki silmas pidades - pakkuda teile parimat. Haagised on valmistatud vastavalt klientide tagasisidele, lähtudes
28 29 CARGO TIPPER KÕRGE VÕIMEKUS MADAL RASKUSKESE Iga BJT haagis on konstrueeritud ühte eesmärki silmas pidades - pakkuda teile parimat. Haagised on valmistatud vastavalt klientide tagasisidele, lähtudes
Microsoft Word - HOTSEC kasutusjuhend v1.900.docx
 HOTSEC Tarkvara kasutusjuhend v. 1.9 1 Sisukord Käivitamine:... 3 Programmi kasutamine... 4 Kasutajate lisamine ja eemaldamine:... 6 Jooksev logi:... 9 Häired:... 9 2 HOTSEC põhioperatsioonide kirjeldus
HOTSEC Tarkvara kasutusjuhend v. 1.9 1 Sisukord Käivitamine:... 3 Programmi kasutamine... 4 Kasutajate lisamine ja eemaldamine:... 6 Jooksev logi:... 9 Häired:... 9 2 HOTSEC põhioperatsioonide kirjeldus
Ülesanne #5: Käik objektile Kooli ümberkujundamist vajava koha analüüs. Ülesanne #5 juhatab sisse teise poole ülesandeid, mille käigus loovad õpilased
 Ülesanne #5: Käik objektile Kooli ümberkujundamist vajava koha analüüs. Ülesanne #5 juhatab sisse teise poole ülesandeid, mille käigus loovad õpilased oma kujunduse ühele kohale koolis. 5.1 Kohavalik Tiimi
Ülesanne #5: Käik objektile Kooli ümberkujundamist vajava koha analüüs. Ülesanne #5 juhatab sisse teise poole ülesandeid, mille käigus loovad õpilased oma kujunduse ühele kohale koolis. 5.1 Kohavalik Tiimi
Praks 1
 Biomeetria praks 3 Illustreeritud (mittetäielik) tööjuhend Eeltöö 1. Avage MS Excel is oma kursuse ankeedivastuseid sisaldav andmestik, 2. lisage uus tööleht, 3. nimetage see ümber leheküljeks Praks3 ja
Biomeetria praks 3 Illustreeritud (mittetäielik) tööjuhend Eeltöö 1. Avage MS Excel is oma kursuse ankeedivastuseid sisaldav andmestik, 2. lisage uus tööleht, 3. nimetage see ümber leheküljeks Praks3 ja
X Window System tuntud kui: X11, X, X-Windows akendussüsteem/akendesüsteem rastergraafikat toetavatele ekraanidele UNIX-maailmas väga levinud mitmesug
 X Window System tuntud kui: X11, X, X-Windows akendussüsteem/akendesüsteem rastergraafikat toetavatele ekraanidele UNIX-maailmas väga levinud mitmesugused realisatsioonid ka Windowsile erinevad realisatsioonid
X Window System tuntud kui: X11, X, X-Windows akendussüsteem/akendesüsteem rastergraafikat toetavatele ekraanidele UNIX-maailmas väga levinud mitmesugused realisatsioonid ka Windowsile erinevad realisatsioonid
Kuidas vahetada esimesi suspensiooni vedrusid autol VOLKSWAGEN TOURAN 1
 Sooritage asendamine järgnevas järjekorras: 1 Vahetage Volkswagen Touran 1 vedrud paarikaupa. 2 Pingutage seisupiduri hooba. 3 Asetage tõkiskingad tagumiste rataste taha. Lõdvendage ratta kinnituspolte.
Sooritage asendamine järgnevas järjekorras: 1 Vahetage Volkswagen Touran 1 vedrud paarikaupa. 2 Pingutage seisupiduri hooba. 3 Asetage tõkiskingad tagumiste rataste taha. Lõdvendage ratta kinnituspolte.
(10. kl. I kursus, Teisendamine, kiirusega, kesk.kiirusega \374lesanded)
") TEISENDAMINE Koostanud: Janno Puks 1. Massiühikute teisendamine Eesmärk: vajalik osata teisendada tonne, kilogramme, gramme ja milligramme. Teisenda antud massiühikud etteantud ühikusse: a) 0,25 t = kg
TEISENDAMINE Koostanud: Janno Puks 1. Massiühikute teisendamine Eesmärk: vajalik osata teisendada tonne, kilogramme, gramme ja milligramme. Teisenda antud massiühikud etteantud ühikusse: a) 0,25 t = kg
laoriiulida1.ai
 LAORIIULID LAORIIULID KAUBAALUSTE RIIULID , arhiiviriiulid - Lk.3 Liikuvad arhiiviriiulid - Lk.5 Laiad laoriiulid - Lk.11 Kaubaaluste riiulid - Lk.13 Drive-in riiulid - Lk.14 Konsool- ehk harudega riiulid
LAORIIULID LAORIIULID KAUBAALUSTE RIIULID , arhiiviriiulid - Lk.3 Liikuvad arhiiviriiulid - Lk.5 Laiad laoriiulid - Lk.11 Kaubaaluste riiulid - Lk.13 Drive-in riiulid - Lk.14 Konsool- ehk harudega riiulid
Septik
 Septik Ecolife 2000 paigaldusjuhend 1. ASUKOHT Septiku asukoha valikul tuleb arvestada järgmiste asjaoludega: pinnase liik, pinnavormid, põhjavee tase, krundi piirid ja vahemaad veekogudeni. Asukoha valikul
Septik Ecolife 2000 paigaldusjuhend 1. ASUKOHT Septiku asukoha valikul tuleb arvestada järgmiste asjaoludega: pinnase liik, pinnavormid, põhjavee tase, krundi piirid ja vahemaad veekogudeni. Asukoha valikul
Peugeot Boxer eriversioonid Hinnad ja varustused Diisel Mootor ja kere Käigukast Võimsus (kw/hj) Keskmine kütusekulu (l/100km) VARUSTUSTASE Varustusta
 Keskmine kütusekulu (l/100km) VARUSTUSTASE Varustusta") Peugeot Boxer eriversioonid Hinnad ja varustused Diisel Mootor ja kere Käigukast Võimsus (kw/hj) Keskmine kütusekulu (l/100km) VARUSTUSTASE Varustustaseeuro 3.5t BlueHDi 140 Chassis Double Cab L2 Pro 23
Peugeot Boxer eriversioonid Hinnad ja varustused Diisel Mootor ja kere Käigukast Võimsus (kw/hj) Keskmine kütusekulu (l/100km) VARUSTUSTASE Varustustaseeuro 3.5t BlueHDi 140 Chassis Double Cab L2 Pro 23
TELLIJAD Riigikantselei Eesti Arengufond Majandus- ja Kommunikatsiooniministeerium KOOSTAJAD Olavi Grünvald / Finantsakadeemia OÜ Aivo Lokk / Väärtusi
 TELLIJAD Riigikantselei Eesti Arengufond Majandus- ja Kommunikatsiooniministeerium KOOSTAJAD Olavi Grünvald / Finantsakadeemia OÜ Aivo Lokk / Väärtusinsener OÜ Tallinnas 14.04.2014 Uuring Energiamajanduse
TELLIJAD Riigikantselei Eesti Arengufond Majandus- ja Kommunikatsiooniministeerium KOOSTAJAD Olavi Grünvald / Finantsakadeemia OÜ Aivo Lokk / Väärtusinsener OÜ Tallinnas 14.04.2014 Uuring Energiamajanduse
Lenovo IdeaPad Kasutusjuhend Tutvuge enne arvuti kasutamist oluliste ohutus- ning kasutusjuhistega.
 Lenovo IdeaPad Kasutusjuhend Tutvuge enne arvuti kasutamist oluliste ohutus- ning kasutusjuhistega. Eestvaade - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
Lenovo IdeaPad Kasutusjuhend Tutvuge enne arvuti kasutamist oluliste ohutus- ning kasutusjuhistega. Eestvaade - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
Majandus- ja kommunikatsiooniministri 10. aprill a määrus nr 26 Avaliku konkursi läbiviimise kord, nõuded ja tingimused sageduslubade andmiseks
 Majandus- ja kommunikatsiooniministri 10. aprill 2013. a määrus nr 26 Avaliku konkursi läbiviimise kord, nõuded ja tingimused sageduslubade andmiseks maapealsetes süsteemides üldkasutatava elektroonilise
Majandus- ja kommunikatsiooniministri 10. aprill 2013. a määrus nr 26 Avaliku konkursi läbiviimise kord, nõuded ja tingimused sageduslubade andmiseks maapealsetes süsteemides üldkasutatava elektroonilise
Robootika ringi tööplaan Sven Hendrikson - Tartu Kivilinna Kool Heilo Altin - MTÜ Robootika 1. klass Ringitunni kestus: üks 60-minutiline tund nädalas
 Robootika ringi tööplaan Sven Hendrikson - Tartu Kivilinna Kool Heilo Altin - MTÜ Robootika 1. klass Ringitunni kestus: üks 60-minutiline tund nädalas. Kasutatavad robootika töövahendid: LEGO WeDo baaskomplekt
Robootika ringi tööplaan Sven Hendrikson - Tartu Kivilinna Kool Heilo Altin - MTÜ Robootika 1. klass Ringitunni kestus: üks 60-minutiline tund nädalas. Kasutatavad robootika töövahendid: LEGO WeDo baaskomplekt
EESTI STANDARD EVS-EN :2000 This document is a preview generated by EVS Terastraat ja traattooted piirete valmistamiseks. Osa 4: Terastraadist
 EESTI STANDARD EVS-EN 10223-4:2000 Terastraat ja traattooted piirete valmistamiseks. Osa 4: Terastraadist keevitatud võrkpiire Steel wire and wire products for fences - Part 4: Steel wire welded mesh fencing
EESTI STANDARD EVS-EN 10223-4:2000 Terastraat ja traattooted piirete valmistamiseks. Osa 4: Terastraadist keevitatud võrkpiire Steel wire and wire products for fences - Part 4: Steel wire welded mesh fencing
Itella Estonia OÜ Uuendatud EXPRESS BUSINESS DAY BALTICS PAKKIDE JA ALUSTE TRANSPORT Express Business Day Baltics paki lubatud maksimaalsed
 Itella Estonia OÜ Uuendatud 05.06.2019 EXPRESS BUSINESS DAY BALTICS PAKKIDE JA ALUSTE TRANSPORT Express Business Day Baltics paki lubatud maksimaalsed kaalud ja mõõdud Min. kaal 100 g Maks. kaal 35 kg
Itella Estonia OÜ Uuendatud 05.06.2019 EXPRESS BUSINESS DAY BALTICS PAKKIDE JA ALUSTE TRANSPORT Express Business Day Baltics paki lubatud maksimaalsed kaalud ja mõõdud Min. kaal 100 g Maks. kaal 35 kg
Tõstuksed Aiaväravad Tõkkepuud Automaatika KÄIGUUKSED Käiguuksed on paigaldatavad kõikidele sektsioonuste tüüpidele. Käiguukse saab varustada kas tava
 KÄIGUUKSED Käiguuksed on paigaldatavad kõikidele sektsioonuste tüüpidele. Käiguukse saab varustada kas tavalise või madala lävepakuga. Soovitav on ukse tellimise ajal käiguukse vajadus ning ning lävepaku
KÄIGUUKSED Käiguuksed on paigaldatavad kõikidele sektsioonuste tüüpidele. Käiguukse saab varustada kas tavalise või madala lävepakuga. Soovitav on ukse tellimise ajal käiguukse vajadus ning ning lävepaku