ELEKTROONIKA TRÜKKPLAATIDE ELEKTROMAGNETLÄHIVÄLJADE SKANEERIMISSEADE
|
|
|
- Kristi Aavik
- 3 aastad tagasi
- Vaatused:
Väljavõte
1 TALLINNA TEHNIKAÜLIKOOL Elektrotehnika instituut ATV80LT Rait Udumäe ELEKTROONIKA TRÜKKPLAATIDE ELEKTROMAGNETLÄHIVÄLJADE SKANEERIMISSEADE Magistritöö Instituudi direktor Juhendaja Konsultant Lõpetaja prof. Ivo Palu teadur Heigo Mõlder nooremteadur Marek Jakovoi Rait Udumäe Tallinn 2017
2 LÕPUTÖÖ ÜLESANNE Üliõpilane: Rait Udumäe, AAAM Õppekava, peaeriala: AAAM02/09 - Elektriajamid ja jõuelektroonika Juhendaja: teadur, Heigo Mõlder Konsultandid: nooremteadur, Marek Jarkovoi Lõputöö teema: (eesti keeles) Elektroonika trükkplaatide elektromagnetlähiväljade skaneerimisseade (inglise keeles) Electromagnetic near field scanner for printed circuit boards Lõputöö põhieesmärgid ja lahendatavad ülesanded ning töö koostamise kava: Eesmärk: Uurimistöö eesmärgiks on töötada välja kontsepsioon ristkordinaatteljestiku x,y,z põhimõttel oleva programmjuhtimisega seademe (CNC) jaoks, mis võimaldab mõõta elektroonika trükkplaatide elektromagnetvälja kahe - ja kolmemõõtmeliselt. Tegemist oleks CNC põhimõttel töötava seadmega, millele on paigaldatud lähiväljaproovik, mis võimaldab kuvada arvuti ekraanil kahe - ja kolmemõõtmelise väljatugevuse pildi trükkplaadist. 1. Seadme vajadus, põhjendus 2. Patendiotsing ( 3. Tarkvarade ülevaade 4. Ülevaade EMÜ standardi nõuetest 5. Projekteerimine, arvutuslik osa 6. Katsetamine 7. Kokkuvõtte 8. Kasutatud kirjandus Täiendav info ja nõuded: Tallinna Tehnikaülikooli Elektroenergeetika ja mehhatroonika instituudi elektromagnetilase ühilduvuse labor. Töö keel: eesti Üliõpilane: Rait Udumäe a /allkiri/ Juhendaja: Heigo Mõlder a /allkiri/ 2
3 AUTORIDEKLARATSIOON Kinnitan, et käesolev lõputöö on minu iseseisva töö tulemus. Kõik selle koostamisel kasutatud teiste autorite tööd, olulised seisukohad, kirjandusallikatest ja mujalt pärinevad andmed on viidatud. Varem ei ole selle alusel kutse- ega teaduskraadi ega inseneridiplomit taotletud. Töö on koostatud litsenseeritud tarkvara abil. Tallinn, a.... Rait Udumäe 3
4 ATV80LT Elektroonika trükkplaatide elektromagnetlähiväljade skaneerimisseade Rait Udumäe, üliõpilaskood AAAM, mai lk. TALLINNA TEHNIKAÜLIKOOL Elektroenergeetika ja mehhatroonika instituud Töö juhendaja: teadur Heigo Mõlder Töö konsultant: nooremteadur Marek Jarkovoi Võtmesõnad: elektromagnetiline ühilduvus, programmjuhtimine, elektromagnet lähivälja mõõtmine Referaat: Lõputöö on 65 lehel, sisaldab 17 tabelit ja 31 joonist. Lõputöö eesmärgiks on välja töötada elektromagnet lähivälja automaatne mõõteseade. Elektromagnetiline ühilduvus on elektriseadme või -paigaldise võime toimida rahuldavalt elektromagnetilises keskkonnas, tekitamata vastuvõetamatuid elektromagnetilisi häireid teistele selles keskkonnas asuvatele seadmetele. Selleks, et erinevate ettevõtete poolt valmistatavad/arendatavad seadmed toimiksid rahuldavalt, on kehtestatud terve rida elektromagnetilase ühilduvuse standardeid. Juhul kui mõne elektroonika trükkplaadi poolt tekitatav emissiooni piirnorm on ületatud, on vaja hakata trükkplaadi komponente detailsemalt uurima, et mis piirkond või milline element täpsemalt on probleemi allikas. Tallinna Tehnikaülikooli elektroenergeetika ja mehhatroonika instituudi elektromagnetilise ühilduvuse laboris ilmnes vajadus elektromagnet lähivälja mõõteseadme järele. Kuna olemasolev GTEM 750 ristlainejuhtkamber ei võimalda tuvastada täpset häiringu asukohta. Uurimistöö eesmärgiks on töötada välja kontseptsioon ristkoordinaatteljestiku x, y, z põhimõttel oleva programmjuhtimisega seadme (edaspidi nimetatud CNC) jaoks, mis võimaldab mõõta elektroonika trükkplaatide elektromagnetvälja kahe - ja kolmemõõtmeliselt. Tegemist oleks CNC põhimõttel töötava seadmega, millele on paigaldatud lähiväljaproovik, mis võimaldab kuvada arvutiekraanil kahe - ja kolmemõõtmelise väljatugevuse pildi trükkplaadist. 4
5 ATV80LT Устрoйcтвo ckaнировaния электромагнитныx полeй электронныx пeчaтныxплaт Райт Удумяэ, студенческий код AAAM, май 2017 г. 65 стр. ТАЛЛИННСКИЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ Институт электроэнергетики и мехатроники Руководитель работы: научный сотрудник Хейго Мёльдер Консультант работы: младший научный сотрудник Марек Ярковой Ключевые слова: электромагнитная совместимость, программное управление, измерение ближнего электромагнитного поля Реферат: В заключительной работе 65 лист, работа содержит 17 таблиц и 31 чертёж. Целью заключительной работы является разработка автоматического измерительного устройства ближнего электромагнитного поля. Электромагнитная совместимость это способность электрического устройства или установки функционировать удовлетворительно в электромагнитной среде, не создавая неприемлемых электромагнитных помех другим находящимся в данной среде устройствам. Для того чтобы изготавливаемые/разрабатываемые другими предприятиями устройства работали удовлетворительно, установлен целый ряд стандартов электромагнитной совместимости. В случае если предельная норма создаваемой некой электронной печатной платой эмиссии превышена, необходимо начать более детальное исследование компонентов печатной платы, чтобы точнее определить, какой участок или какой элемент является источником проблемы. В лаборатории электромагнитной совместимости института электроэнергетики и мехатроники Таллиннского технического университета возникла необходимость в измерителе ближнего электромагнитного поля, поскольку существующая камера поперечной электромагнитной волны GTEM 750 не позволяет точно установить место нахождения помехи. Цель исследовательской работы выработать концепцию для работающего на принципе сетки прямоугольных координат x, y, z устройства с программным управлением (в дальнейшем именуемого ЧПУ), которое позволит измерять электромагнитные поля электронных печатных плат в двух и трёх измерениях. Речь идёт о работающем на принципе ЧПУ устройстве, на которое установлен датчик ближнего поля, позволяющий отобразить на экране компьютера картинку двух- и трёхмерной силы поля печатной платы. 5
6 ATV80LT Electromagnetic Near Field Scanner for Printed Circuit Boards Rait Udumäe, student code AAAM, May lk. TALLINN UNIVERSITY OF TECHNOLOGY Insititute of Electroenergetics and Mechatronics Supervisor: Heigo Mõlder Consultant: Marek Jarkovoi Key words: electromagnetical compatibility, program-operating, measurement of the electromagnetical near field Summary: Thesis has 65 pages, includes 17 charts and 31 diagrams. The aim of the thesis is to develop an automated measurement device (scanner) for the electromagnetical near field. Elecromagnetic compatibility is the ability of an electrical device or an electrical installation to work satisfactorily in an electomagnetical environmet without causing electromagnetical disturbances to other devices which are in the same environment. A lot of electromagnetical compatibility standards have been stated for that purpose. If a circuit board has crossed its electronical emission limit, there is a need to inspect the details of the circuit board to clarify which area or element is the source of the problem. There was a need for and electomagnetical near field measuring device in the electroenergetic and mechatronical institute of Tallinn University of Technology, because the GTEM 750 magnetical field analyze chamber could not identify the exact location of the problem. The aim of the thesis is to develop a concept for a program-operated device (hereafter referred to as CNC) which would work on a principle of x, y, z axis and that would measure the electromagnetical fields of the circut boards two- and threedimensionally. It would be a device working on CNC principles, that has a near field probe and that could display a twoand threedimensional field intensity picture of the circuit board to the computer screen. 6
7 SISUKORD Eessõna... 9 Sissejuhatus Elektromagnetilise lähivälja mõõteseadmete vajadus ja ülevaade Ettevõtte Peritec Nanyangi Tehnikaülikool Ettevõte Speag Seadmete võrdluse kokkuvõte Patendiotsing Otsingusõnad ja tulemite hulk Patent Patent Ülevaade elektomagnetilise ühilduvuse standardi nõuetest Prooviku tööpõhimõte ja katseprooviku kirjeldus Prooviku tööpõhimõte Katseprooviku kirjeldus Mõõtepooli elektromagnetilise induktsiooni tööpõhimõtte kirjeldus Elektromagnetväljade arvutuste põhivõrrandid Lõplike elementide meetod Kolmemõõtmelised väljaarvutused lõplike elementide meetodil Modelleerimine COMSOL Multiphysics tarkvaras CNC masina konstruktsioon ja komponendid Prototüüpseadme juhttarkvara kirjeldus Elektromagnetilise lähivälja mõõtmiskatsed laboritingimustes Elektromagnetlähivälja katsemõõtmiste kirjeldus Katses kasutatud seadmed:
8 12.3. Elektromagnetilise lähivälja mõõtmiskatsed laboris Tuleviku Arendustegevused Kokkuvõte Kasutatud kirjanduse loetelu
9 EESSÕNA Lõputöö ülesande pakkus välja juhendaja Heigo Mõlder. Tallinna Tehnikaülikooli elektroenergeetika ja mehhatroonika instituudi elektromagnetilise ühilduvuse laboris ilmnes vajadus elektromagnet lähivälja mõõteseadme järele. Laboris on olemas GTEM 750 ristlainejuhtkamber, mis on mõeldud väiksemate objektide standardi IEC/EN kohaseks elektromagnetväljade mõõtmiseks, kuid puudub mõõteseade edasiseks täpseks analüüsiks tuvastamaks häiringuallikaid. Lõputöö eesmärgiks oli elektromagnetilise lähivälja mõõteseadme kontseptsiooni loomine elektromagnetilise ühilduvuse labori tarbeks. Autor soovib tänada juhendajat Heigo Mõlderit ja Marek Jarkovoi abi eest töö valmimisel. 9
10 SISSEJUHATUS Elektromagnetiline ühilduvus on elektriseadme või -paigaldise võime toimida rahuldavalt elektromagnetilises keskkonnas, tekitamata vastuvõetamatuid elektromagnetilisi häireid teistele selles keskkonnas asuvatele seadmetele. Selleks, et erinevate ettevõtete poolt valmistatavad/arendatavad seadmed toimiksid rahuldavalt, on kehtestatud terve rida elektromagnetilase ühilduvuse standardeid. Tallinna Tehnikaülikooli elektroenergeetika ja mehhatroonika instituudi elektromagnetilise ühilduvuse laboris on olemas GTEM 750 ristlainejuhtkamber, mis on mõeldud väiksemate objektide standardi IEC/EN kohaseks elektromagnetväljade mõõtmiseks. Antud kamber lubab seadme poolt tekitatavaid elektromagnetvälju uurida küll standardis kehtestatud piirnormidest tulenevalt, ent ei võimalda detailsemat analüüsi juhul, kui mõni piirnorm on ületatud. Juhul kui mõne elektroonika trükkplaadi poolt tekitatav emissiooni piirnorm on ületatud, on vaja hakata probleemi allikat täpsustama, uurides detailsemalt trükkplaadi komponente. Selleks kasutatakse enamasti lähiväljaproovikuid, mida hoitakse mõõtmishetkel käes ja mis seetõttu annavad suhteliselt ebamäärase tulemuse. Sellise käeshoitava väljaproovikuga ebamäärane mõõtmine ei võimalda fikseerida prooviku ja trükkplaadi vahelist kaugust, mistõttu muutub ka mõõdetava väljatugevuse suurus. Probleemse piirkonna/komponendi leidmine on ajamahukas ning tülikas ja peale paranduste tegemist ei ole lihtne aru saada, kas midagi muutus. Hetkel kasutuses olev lahendus pärsib elektroonika trükkplaatide parandamist ja arendamist elektromagnetilise ühilduvuse seisukohast lähtuvalt. Uurimistöö eesmärgiks on töötada välja kontseptsioon ristkoordinaatteljestiku x, y, z põhimõttel oleva programmjuhtimisega seadme (edaspidi nimetatud CNC) jaoks, mis võimaldab mõõta elektroonika trükkplaatide elektromagnetvälja kahe - ja kolmemõõtmeliselt. Tegemist oleks CNC põhimõttel töötava seadmega, millele on paigaldatud lähiväljaproovik, mis võimaldab kuvada arvutiekraanil kahe - ja kolmemõõtmelise väljatugevuse pildi trükkplaadist. 10
11 1. ELEKTROMAGNETILISE LÄHIVÄLJA MÕÕTESEADMETE VAJADUS JA ÜLEVAADE More-Moore 1 ja More-than-Moore 2 koostamistehnoloogiad "tarkade" madalavõimsuslike süsteemide juures muudavad komponente pidevalt väiksemaks, hõlmates sealjuures laiemat valikut eritüübilisi funktsioone lühemate lülitusaegadega ja seega ka väiksema voolutarbega. Samaaegselt väheneb ka müra-signaali suhe, mis teeb iga uue põlvkonna seadmed tundlikumaks. Elektroonikaseadmete arendajatele tähendab see probleemide suurenemist elektromagnetmüra haldamisel. Kaitset müra eest ei vaja mitte vaid arendatav seade üldiselt, vaid tuleb võtta arvesse kõigi trükkplaadil olevate komponentide nõudmisi. Need piiripealsed tingimused sunnivad pöörama tähelepanu parasiitmõjudele kogu süsteemi väljatöötamise juures, et tagada töökindel disain. Kasutades sobivaid EDA (electronics design automation) tööriistu ja simulaatoreid, on võimalik analüüsida paljusid kiirgust mõjutavaid parameetreid juba disainifaasis. Paraku ei taga see piisavat kindlust, kuna mõõtude suhe suurimate suuruste (trükkplaat) ja väiksemate komponentide (kiibisisesed ühendustraadid) vahel võivad erineda mitme suurusjärgu võrra, mis omakorda teeb 3D-joonised ja seega ka simulatsioonid väga keerukaks. Hoolimata sellest, et kiirguskarakteristikud on otseselt seotud kiibisiseste lülituste ning geomeetrilise struktuuriga, ei ole signaalide tugevus ja täpsed omadused alati teada ning seega tuleb teha simulatsioonide tegemisel eeldusi. 1 More-Moore tehnoloogia, mis käib kaasas Moore i seadusega. Pooljuhtide väiksemaks ja efektiivsemaks muutumisega luuakse ka võrdeliselt keerukamaid seadmeid. 2 More-than-Moore lisaks üldisele pooljuhtide suuruse ja energiatarbe vähenemisest tulenevale arengule kasutatakse ka muid tehnoloogiauuendusi nii digitaal- kui ka analooglektroonikas uute ja rohkemate funktsioonidega seadmete loomisel. 11
12 Lähivälja mõõtmise tehnoloogiad aitavad nõrga elektri- ja magnetvälja kõrgel resolutsioonil (kuni 10 μm) kaardistamisega seda probleemi vähendada. Mõõtmistulemused aitavad eristada ja tuvastada erinevaid potentsiaalseid elektromagnetilisi häireid (electromagnetic interference edaspidi nimetatud EMI) ja allikaid töötavas süsteemis. Lähivälja mõõtmine lubab lisaks müraallika positsiooni määramisele uurida ka müraspektrit. Mitmekülgsus, mida see mõõtmine pakub, aitab juba disaini varajastes järkudes tuvastada ning parandada põhimõttelisi vigu. Just nende vigade parandamine ja vältimine varajases väljatöötamis etapis säästab väga palju aega ja raha, sest vigade parandamine enne tootmis tsüklite algust võib kujuneda pea võimatuks või väga kulukaks protsessiks. Graafiline selgitus joonisel 1. Lisaks elektromagnetilise sobivuse analüüsimisele lubab lähivälja laiaulatuslikkus ning tundlikkus teha mõõtmisi ka kõrgete turvanõuetega valdkondades, näiteks kiipkaartide arenduses. See on uus ja paljutõotav valdkond, mis vajab just sellist mõõtesüsteemi. Lähivälja mõõtmised aitavad leida nõrkusi turvasüsteemides ning ka meetmeid nende ärakasutamise vastu. [1] Joonis 1. Häiringute likvideerimismaksumus tootmisprotsessi järkudes [2] Alljärgnevalt on toodud välja mõned lähivälja mõõtesedmed omas valdkonnas tunnustatud ettevõtetelt ja ülikoolidelt. 12

13 1.1. Ettevõtte Peritec Jaapani ettevõte Peritec on loonud lähivälja mõõteseadme EMI Tester EMV-100. Seadme spetsifikatsiooni alusel võib järeldada, et seade on suuteline kuvama korrektset kõrgresolutsioonilist ja kvaliteetset lähiväljapilti. Seade on mõeldud mõõtma magnetlähivälja ja selleks kasutatakse lähiväljaproovikut W07/F97. Seadme raam on projekteeritud Hiwini juhikutele ja kuulkruvikuile, mis tagavad võimalikult väiksed vead mehaanikasüsteemis, võimaldades mõõtetäpsust ±0.05 mm. Kvaliteetsed mehaanikakomponendid ja kasutatav Rohde and Schwarz spektroanalüsaator muudavad seadme hinna kalliks. Seadme hind ilma Rohde and Schwarz spektroanalüsaatorita on eurot, lisaks impordiga seonduvad maksud. Joonis 2. Jaapani ettevõtte PERITEC seade EMI Tester EMV-100 Seadme EMI Tester EMV-100, vt Joonis 2, spetsifikatsioon [3]: mõõteala x-170 mm y-170 mm z-100 mm; telgede täpsus ±0.05 mm; tarkvara Firma siseselt loodud programm EMVm1; lähivälja proovik W07/F97; komplektis olev eelvõimendi AFS P-4 (100 MHz~6 GHz, NF=2.5 db, GAIN=36 db); masin on suuteline looma nii 2D kui ka 3D graafikuid magnetväljast. [3] 13

14 1.2. Nanyangi Tehnikaülikool Singapuris asuvas Nanyangi Tehnikaülikooli elektromagnetilise ühilduvuse laboratooriumis Electromagnetic Effects Research Laboratory on loodud ainueksemplaris lähivälja mõõteseade Langer IC Scanner Fs 103, vt Joonis 3. [4] Seade loodi vajadusest teostada detailsemat analüüsi uuritavaile seadmetele juhul kui on ületatud mõni standardis kehtestatud elektromagnetvälja piirnormidest. Joonis 3. Nanyang Technological University loodud mõõteseade Langer IC Scanner Fs 103 Mõõteseadme Langer IC Scanner Fs 103, vt Joonis 2, spetsifikatsioon [4] : mõõteala: x-300 mm, y-300 mm, z-300 mm, z pöörlemine ±180 ; mõõta saab elektrivälja ja magnetvälja sagedusalas 10 MHz kuni 3 GHz; seade vastab IEC standardi nõuetele; juhtprogrammiks on ChipScan, programm võimaldab luua mõõtetulemustest kolmemõõtmelise magnetvälja pildi ja vajadusel on võimalik andmed väljastada ka excel tabeli kujul. 14

15 1.3. Ettevõte Speag Šveitsi ettevõte Speag toodab kõige kvaliteetsemat ja kõrgtehnoloogilisemat lähimagnetvälja ja elektrivälja mõõteseadet ICEy - Interference & Compatibility Evaluation System. ICEy mõõtemasin on üks võimekamaid seadmeid omas valdkonnas mõõtmaks magnetvälja ja elektrivälja. Seadmekamber on täielikult varjestatud ja summutab efektiivselt ümbritsevad häireid tekitavad väljad (vt.joonis 4). ICEy seadme erinevusena võrreldes konkurentidega võib välja tuua mõõteotsikute automaatse vahetamise. Mõõdetavast objektist teeb seade ka 3D mudeli kasutades foto- ja lasermõõte instrumente. Joonis 4. Šveitsi ettevõte Speag loodud mõõteseade ICEy Mõõteseadme ICEy, vt Joonis 4, spetsifikatsioon [5] : mõõteala 450 x 450 x 115 mm; mõõtmistäpsus ± 25 μm; fotosilma resolutsioon mm 2 /px; seade kasutab magnetvälja mõõtmiseks proovikut mõõtevahemikus 10 MHz 6 GHz. 15
16 1.4. Seadmete võrdluse kokkuvõte Turul olemasolevate seadmete lühivõrdlusest võib järeldada, et nõudlus lähivälja mõõtemasinate järgi on olemas. Nõudluse tingib kiire elektroonikatööstuse areng, kus soovitakse järjest väiksemale trükkplaatide alale mahutada järjest rohkem elektroonikakomponente. See soov seab elektroonikainsenerid raskesse olukorda, kus on vaja tegeleda häiringute vältimise ja nende tuvastamisega. Häiringute tuvastusprotsessis saabki abiks olla antud töös väljatöötatav mõõteseade. Turul olevate mõõteseadmete võrdlusest kahjuks ei õnnestu kõikide seadmete hindu välja selgitada, kuna tegemist on seadmetega, mida modifitseeritakse väga suures ulatuses vastavalt ostja soovile. Seetõttu tuleb hinna väljaselgitamiseks valmistajaga põhjalikke läbirääkimisi pidada. Õnnestus saada Jaapani tootja Peritc seadme Tester EMV-100 baashind, millest saime kinnitust, et tegu on kallite mõõteseadmetega. Mõõteseadmete hind oleneb paljudest aspektidest: mõõteseadme täpsusklass erinevate mõõtmiste teostusvõimekus lisavarustus aste (3d skanner, foto tuvastus jne.) spektroanalüsaatori hinnaklass (valmistaja) seadme mehaanika komponentide kvaliteet Võrreldes turul olevate mõõteseadmetega planeerime mõõteseadme valmistada standardsena, mõõtmaks ainult elektromagnetilist lähivälja ning selle tootmine on kordades soodsam. Seadme sihtrühmaks oleksid ettevõtted ja ülikoolid, kes tegelevad pideva riistvara arendusega ning kus eksisteerib pidev vajadus antud seadme järele. 16
17 2. PATENDIOTSING Elektromagnetilise lähivälja mõõteseadme patendiotsing viidi läbi andmebaasis ee.espacenet.com. Espacnet andmebaasini jõuti Eesti Patendiameti kodulehelt epa.ee kaudu. Espacenet sisaldab patendiandmeid kogu maailmast, sealhulgas ka Eestist. [6] [7] 2.1 Otsingusõnad ja tulemite hulk Magnetic near field- leiti 25 vastet, neist ükski ei olnud lähivälja mõõteseade. Near field scanner- leiti 184 vastet, neist 4 olid laadsed lähivälja mõõteseadmele. Electromagnetic interference scanner- leiti 24 vastet, neist ükski ei olnud lähivälja mõõteseade. Magnetic near field scanner- leiti 22 vastet, neist ükski ei olnud lähivälja mõõteseade. Pcb near field scanner- 1 vaste leiti, ei olnud lähivälja mõõteseade. EMI scanner- 105 vastet leiti, neist ükski ei olnud lähivälja mõõteseade. Patendiotsingu tulemusena vaadati läbi 361 erinevat patenti. Neist neli olid sarnase lähivälja mõõteseadme kirjeldused. Tuuakse välja kaks seadet, mis olid tehnilise lahenduse poolest kõige sarnasemad meie planeeritavale lähivälja mõõteseadmele. 2.2 Patent 1 Patendi nimi: Antenna Near-Field Probe Station Scanner [8] Patendi number: US (A1) Patent on taotletud: Ameerika Ühendriigid Patendi taotlejateks ja leiutajateks: Zama Afros; Lee Richard; Darby William; Barr Philip; Lambert Kevin; Miranda Felix. 17
18 Patendi lühikirjeldus: Skanner suudab mõõta elektromagnetilist lähivälja. Mõõtmise ajal liigub skanner lineaarselt piki x, y ja z-telje, mõõteantenni suudab seade pöörata 90. Mõõteandmed salvestatakse ning töödeldakse, määramaks mõõdetava süsteemi lähiväljaomadusi, et optimeerida süsteemi. Skaneerimise lõpus töötleb programm (kasutajaliides) kogutud andmed ja kuvab neist kolmemõõtmelise väljapildi. Süsteem võimaldab koos kasutajaliidesega ulatuslikku lähiväljaanalüüsi ja andmetöötlust. Seadme skeem joonisel 5. Joonis 5. Lähivälja mõõtemasin patendi numbriga US (A1) [8] 2.3 Patent 2 Patendi nimi: Scanning Mechanism of Electromagnetic Compatible Scanner Patendi number: CN (U) Patent on taotletud: Hiinas Patendi taotlejaks : Zhejiang ülikool. Leiutajad: Y. Yongxiang, Y. Kun, S. Pingping, C. Hong ja Z. Fan [9] 18
19 Patendi lühikirjeldus: Skaneerimisseade on loodud elektromagnetiliste lähiväljade uurimiseks. Seadmel on kolm telge x, y ja z. Seadme mehaaniline osa tagab kvaliteetse mõõtetäpsuse. Mõõteproovikut liigutatakse koordinaatteljestikus juhtprogrammi alusel. Saadud andmed koondatakse juhtprogrammi ja nende alusel on võimalik juhtprogrammis läbi viia lähivälja analüüsi. Joonis 6. Lähivälja mõõtemasin patendinumbriga CN (U) [9] Patendi otsingutulemustest ja uuritud patentidest võib järeldada, et lähivälja mõõteseadmeid on välja töötatud vähe ja seadmete konstruktsioonid on projekteeritud metallist, mis häirib lähivälja mõõtmisprotsessi. Patendiotsing kinnitas, et sellist lähivälja mõõteseadet nagu plaanis luua, ei ole enne maailmas valmistatud. 19
20 3. ÜLEVAADE ELEKTOMAGNETILISE ÜHILDUVUSE STANDARDI NÕUETEST Elektrienergia kasutamine igapäevaelus kasvab pidevalt ja see toob endaga kaasa järjest suurema elektromagnetilise reostuse tekke. Elektromagnetiliste häiringute kõrge nivoo ühises elektromagnetilises keskkonnas võib segada elektroonikaseadmete laitmatut talitlust. Selle vältimiseks peavad kõik elektriseadmed olema välja töötatud elektromagnetiliselt ühilduvatena. See tähendab, et iga üksik seade peab suutma taluda teiste sama keskkonna seadmete elektromagnetilist mõju ja ka iga üksiku seadme mõju kõigile seadmetele selles keskkonnas peab olema aksepteeritav. Ühilduvuse tagamiseks on välja töötatud suhteliselt uus teadusharu - elektromagnetiline ühilduvus (edaspidi nimetatud EMÜ). EMÜ on elektrotehnikaharu, mis uurib, analüüsib ja lahendab vastastikuse elektromagnetilise mõjutamise probleeme. [2] Elektri- ja elektroonikalülituste laialdane levik on tekitanud olukorra, kus palju erinevaid seadmeid talitleb ühises keskkonnas üksteise vahetus läheduses ja nende negatiivne mõju üksteisele kasvab. Kui elektrotehniline seade on laboritingimustes kasutuskõlbulikuks viimistletud, on väga oluline, et ta talitleks laitmatult ka reaalsetes oludes, kus tema vahetus läheduses töötab teisi seadmeid. Elektrotehnilised seadmed peavad olema tundetud väliste häiringute suhtes ja ei tohi olla ka ise häiringute tekitajateks. Konstruktorite ülesandeks on tagada, et väljatöötatud seade ei ole häiringute allikaks ja et tema kasutuselevõtt ei risustaks ümbritsevat keskkonda elektromagnetiliselt. Häiringud ja elektromagnetiline häirumine on muutunud elektriseadmete väljatöötajatele ja tootjatele üheks peamiseks lahendamist vajavaks uurimisülesandeks, kuna elektroonikaseadmed muutuvad üha kompaktsemaks. See tähendab, et rohkem elektroonikakomponente peab mahtuma ühte ruumiühikusse trükkplaadil. Seoses komponentide tihedama paiknemisega trükkplaadil kasvab elementide vastastikune negatiivne mõju. [2] 20
21 Lähivälja mõõtmiseks ja määramiseks on välja töötatud standard: MEASUREMENT OF ELECTROMAGNETIC EMISSION IEC [10], mille alusel on võimalik teostada korduvaid laboratoorseid mõõtmiskatseid ja tulemustest lähtudes viia sisse muudatusi elektroonikaseadmete disainis. Standard on mõeldud elektromagnetilise lähivälja mõõtmiseks vahemikus 1 MHz - 1 GHz. Ühtse standardi koostas rahvusvaheline organisatsioon IEC (International Electrotechnical Commission) lähtudes kolmest väljatöötatud kogumist, mis reguleerisid lähivälja mõõtmist enne IEC standartit: IBIS (Input/Output Buffer Information Specification), IMIC Jaapanis (Interface Module for Integrated Circuits) ja ICEM Prantsusmaal (Integrated Circuit Emission Model). IEC loodi juba aastal, IEC on juhtiv organisatsioon maailmas publitseerimaks kõiki elektroonikaga ja sellega seotud standardeid. IEC on loonud platvormi, kus riigid ja suurtööstused üle maailma saavad paika panna standardid, millest lähtuvalt loovad ja toodavad elektroonikaseadmeid. [10] [11] 21
22 4. PROOVIKU TÖÖPÕHIMÕTE JA KATSEPROOVIKU KIRJELDUS 4.1 Prooviku tööpõhimõte Magnetvälja tugevust H saab mõõta raamantenniga (Joonis 7). Raami tasapinnaga risti oleva vahelduvmagnetvälja (Joonisel 8) komponendi toimel tekib elektromotoorjõud, mis on võrdeline tuletisega dh/dt ja raami pindalaga SA. Koormusel tekib mitmesugune pinge olenevalt takistuse RH ja induktiivtakistuse ωla suhtest, kus ω on mõõdetava häire sagedus, ning induktiivsus on määratud avaldisega (1) [2]: L A = μ 0 r (ln ( 8r ) 2), (1) a kus LA-induktiivsus μ 0 - keskkonna magnetiline läbitavus r- raami raadius a-mähise traadi läbimõõt kui RH>>ωLA, siis pinge uh oleneb sagedusest (2) [2]: u H = μ 0 S A dh dt, (2) kus u H -pinge S A - raami pindala dh- magnetvälja tugevuse muutus ajas dt- aja muutus ja H määramiseks tuleb arvestada seda sõltuvust või kasutada mõõteseadmes integraatorit. Kui RH ωla, siis pinge on (3) [2] u H = R H L A μ 0 S A H, (3) kus RH- takistus H- magnetväljatugevus 22
23 ja pinge mõõtmine võimaldab otse määrata H. [2] Joonis 7. Raamantenni väliskuju [2] 4.2 Katseprooviku kirjeldus Võimalik on kasutada aktiivproovikuid ja passiivproovikuid. Testmõõtmised on tehtud passiivproovikuga. Passiivprooviku peamisteks eelisteks on märgatavalt lihtsam ehitus ja suurem töökindlus erinevatel tingimustel. Antud seadmes koosneb passiivproovik kolmest koondtsentrilisest solenoidmähisest, mis on paigutatud 90-kraadiste nurkade all kolmele ristuvale tasandile. Mähised on varjestatud, et vältida elektrivälja mõju mõõtmistele. Kuna passiivproovikul mõõdetakse otse proovikust tulevat signaali, peab piisavalt tugeva signaali saavutamiseks kasutama suuri mähiseid: sisediameeter alates 5 mm ja keerdude arv > 10. Analoogset mähiste kombinatsiooni kasutab ka tuntud mõõteseade Aaronia Spectran (vt Joonis 10). Aaronia Spectrani mõõtemähisest ei leidu ühtegi gabariitmõõtu, tegu on ilmselt mitteavaliku informatsiooniga. Katse prooviku keha mõõtmeid vaata jooniselt 9. Prooviku keha 3D prinditud materjaliks on plastik PE (polüetüleen). Tulenevalt mähiste suuremast induktiivsusest on raskendatud kõrgete sageduste mõõtmine. Prooviku kõik kolm mähist on eri mõõtudega (vt. Tabel 1) ja sellega seoses ka muud omadused on erinevad. Ühtlaste mõõtetulemuste saamiseks on vaja kalibreerida eraldi kõik kolm mähist vastavalt sagedusvahemikkudele. Prooviku kalibreerimisel määratakse prooviku parasiitmahtuvused ja induktiivsused. Täppiskalibreering toimub tarkvaraliselt. 23

24 Tabel 1. Katse prooviku parameetrid Mähistraadi Mähise Mähise gabariitmõõtmed läbimõõt keerdude arv Mähis 1 0,12 mm 50 Välis läbimõõt: 15 mm Sise läbimõõt: 13 mm Mähise kõrgus: 4 mm Mähis 2 0,12 mm 50 Välis läbimõõt: 12 mm Sise läbimõõt: 10 mm Mähise kõrgus: 4 mm Mähis 3 0,12 mm 50 Välis läbimõõt: 9 mm Sise läbimõõt: 7 mm Mähise kõrgus: 4 mm Aktiivprooviku erinevuseks passiivproovikuga võrreldes on prooviku sisse ehitatud võimendi. Võimendus peab olema mõõtepunktile piisavalt lähedal, et vältida müra signaalis, samas ei tohi mõõdetav objekt segada võimendit ning võimendi töö ei tohi segada mõõtmist. Aktiivprooviku ülesehitus lubab kasutada väiksemaid vastuvõtumähiseid ja ka mõõta suuremaid sagedusvahemikke. Aktiivproovikuga saab sooritada palju kõrgema resulutsiooniga mõõtmisi. Samas on aktiivproovik tundlikum keskkonna mõjudele, nagu temperatuuri muutused või toiteallikast tulev müra. Sellepärast on aktiivproovikuga mõõtes seadmetele ümber ehitatud varjestuskambrid vähendamaks keskkonnast tulevaid häiringuid. Joonis 8. Raamantenni pinnaga risti olevad magnetvootihedus jõujooned 24

25 Joonis 9. Katseseadmel kasutatav passiivprooviku keha Joonis 10. Mõõtemähis, mida kasutatakse Aaronia Spectran seadmes [12] 25
 saame magnetvoo ϕ1. Magnetvoole lisandub ülekandetegur K, mis on väiksem kui 1. Mähises 2 (mõõtemähises) keerdude arv W2.")
26 4.3 MÕÕTEPOOLI ELEKTROMAGNETILISE INDUKTSIOONI TÖÖPÕHIMÕTTE KIRJELDUS Kui Mähisele 1 (väljaallikas) rakendada e1 ( ajas muutuv elektromotoorjõud ), siis sellega kaasneb Mähises 1 vool i1. Mähise 1 keerud on W1. Voolu ja mähise keerdude korrutisena (i1 W1) saame magnetvoo ϕ1. Magnetvoole lisandub ülekandetegur K, mis on väiksem kui 1. Mähises 2 (mõõtemähises) keerdude arv W2. W2 korrutatakse Kφ1 dt (4). (vt Joonis 11) see võrdub -e2 ja -e2 mähises 2 vool -i2 e 1 i 1 (i 1 W 1 ) φ 1 Kφ 1 W 2 Kφ 1 dt e2 i2 (4) Joonis 11. Elektromagnetilise induktsiooni tööpõhimõte 26
27 5. ELEKTROMAGNETVÄLJADE ARVUTUSTE PÕHIVÕRRANDID Magnetväljade arvutamiseks on kasutatud COMSOL Multiphysics 5.2 tarkvara, selle tarkvara lähtealuseks on Maxwelli seadused. Elektromagnetvälja jaotust iseloomustab Maxwelli I seadus (koguvoolu seadus), mis kirjeldab voolutihedust J, A/m 2, sõltuvust magnetvälja tugevusest H, A/m (5) [13]: H = J, (5) kus - nabla ehk Hamiltoni operaator H magnetvälja tugevuse vektor J- voolutihedus tugevus vektor Lähtudes Maxwelli II seadusest (elektromagnetilise induksiooni seadus, mille olemuse avastas esimesena Faraday, kuid mille matemaatiliselt formuleeris Maxwell), on elektrivälja tugevus E, V/m, sõltuvuses magnetvoo tiheduse B, T, muutumise kiirusega (6) [13]. E = B t, (6) kus E - elektrivälja tugevus B- magnetvoo tihedus -suuruse muutus ajas Magnetvälja tugevuse H ja magnetvoo tihedus B vahelist sõltuvust võib kirjeldada seosega, kus μ on materjali ehk keskkonna magnetiline läbitavus, H/m (7) [13]: B = μh, (7) kus μ- materjali magnetiline läbitavus. 27
28 6. LÕPLIKE ELEMENTIDE MEETOD Lõplike elementide meetod (finite element method ) ehk LEM (edaspidi nimetatud FEM) on numbriline arvutusmeetod insener-tehniliste ja füüsikaliste ülesannete lahendamiseks. Meetod hõlmab üldiste diferentsiaalvõrrandite ja/või nende süsteemi lähendamist üle mingi pideva piirkonna (nt tasand), mis jaotatakse väiksemateks lõplikeks elementideks. Numbriline lahend kogu piirkonna jaoks saadakse lõplike elementide summeerimisega mingi eeskirja järgi. [14] Lõplike vahede meetodit ehk võrgumeetodit võeti kasutusele 2D süsteemis staatiliste elektromagnetväljade määramiseks 1960ndatel aastaiks oli antud teemal publitseeritud juba ca 15 artiklit. Sealt edasi 1970ndatel, jõuti FEM meetodini, millest 1980ndate alguseks oli välja arenenud juba lihtsamate objektide aegsõltuvuste pöörisvoolude ja sekundaarväljade arvutamine. 1990ndatel oli kahemõõtmeliste elektromagnetväljade arvutamine juba igapäevane tööriist paljudes valdkondades. Kahetuhandetail aastail hakati arendama kolmemõõtmelisi väljaarvutustarkvarasid ning praeguseks hetkeks on areng antud valdkonnas jõudnud insener-tehniliste ja füüsikaliste tarkvaradeni nagu: Comsol, Ansys, Infolytic. Tänaseks päevaks on publitseeritud ligi 30 tuhat (hulk kasvab pidevalt) teadusartiklit antud meetodi rakenduseks. FEM meetodi kiire areng on toimunud peamiselt seetõttu, et see võimaldab lahendada väga paljusid ülimalt keerukaid tööstusrakendustes tekkivaid elektromagnetväljade, mehaanilise elastsuse ja hüdrodünaamikaga seotud probleeme. Kasutades Comsol tarkvara, mis põhineb lõplike elementide meetodil, viiakse läbi virtuaalsed katsed saamaks kinnitust antud uuringus läbiviidud tulemustele laboris. [13] 28
29 7. KOLMEMÕÕTMELISED VÄLJAARVUTUSED LÕPLIKE ELEMENTIDE MEETODIL Magnetvootiheduste ja tekkivate magnetiliste jõutiheduste täpsemaks uurimiseks/vaatlemiseks teostatakse arvutused läbi lõplike elementide FEM-meetodil. FEM-meetod tähendab, et uuritav objekt jaotatakse lõplikeks alamobjektideks ning arvutatakse iga alamobjekti väärtused vastavalt diferentsiaal- või integraalmeetodile. Seejärel liidetakse üksikute alamobjektide jaoks saadud tulemused üheks tervikuks. Arvutuste läbiviimiseks on valitud programm Comsol Multiphysic 5.2. Comsol Multiphysics 5.2 on mitmeotstarbeline tarkvaraplatvorm füüsikapõhiste probleemide simuleerimiseks. Lõplike elementide arvutuse teostab arvutiprogramm, seepärast on esimeseks ülesandeks võimalikult täpselt programmile ette anda poolide mõõtmed ja asendid teineteise suhtes. Teiseks tuleb kirjeldada täpselt poolide materjalid, sisendpinge ja sagedused. Sammuti tuleb määrata soovitav mõõtetäpsus ehk elementide arv. Mida suurem on elementide arv, seda suurem on ka arvutusmaht. Programmis Comsol Multiphysics 5.2 jaotatakse FEM-mudel (vt Joonis 12) arvutusvõrgustikuks, millest nelinurkseid elemente on 11242, nn tetraelemente ja tipuelemente 776 (vt Joonis 13). Mida tihedam arvutusvõrgustik on, seda täpsem on tulemus, aga siin tuleb arvestada olemasoleva arvutusvõimsusega. Modelleerimise läbiviimiseks antud töös kasutatakse arvutit järgmiste parameetritega: protsessor IntelCore i7, 2.80 GHz; muutmälu (RAM) 12 GB; operatsioonisüsteem 64 bitti. Sellisel arvutil võtab ülesande lahendamine aega 1 m 22 s. [13] 29


30 Joonis 12. Arvutusvõrgustik FEM-meetodi rakendamiseks Joonis 13. Arvutusvõrgustik, elementide suurused 30
31 8. MODELLEERIMINE COMSOL MULTIPHYSICS TARKVARAS Comsolis [15] (litsents Tallinna Tehnikaülikooli Elektroenergeetika ja mehhatroonika instituudil) saame modelleerida elektromagnetilisi lähiväljakatseid ideaaltingimustes. Mõlemad katsed nii Comsol Multiphysicsis 5.5 kui ka laboris viiakse läbi samade algparameetrite põhjal. Mõõtmaks lähivälja kasutatakse magnetvälja allikana mähist, kuna mähise genereeritud magnetvälja on võimalik täpselt kirjeldada programmis Comsol Multiphysicsis 5.2. Trükkplaadil tööolukorras genereeritavate magnetväljade kirjeldamine oleks palju komplitseeritum, kui mitte isegi võimatu. Seepärast on kasutatud mähist, mille algparameetrid on teada (mähise parameetrid toodud Tabeli 8). Kuna katseseade CNC konstruktsioon on valmistatud roostevaba terasest ja töölaud on alumiiniumist, on mõõtmiskatsed Comsolis teostatud nii metallist alusplaatidega kui ka ilma, nägemaks, kas metallplaadid muudavad mõõtetulemusi ja kui muudavad, siis mis ulatuses. Esimese etapina mõõtmisprotsessis kirjeldamaks mähiseid ja mähiste paiknemist teineteise suhtes modelleeriti mähiste CAD (computer-aided designmudelid ) mudelid programmis SolidEdge Student (CAD tarkvara). Pannes paika mähiste paiknemise teineteise suhtes ja ka kaugused, sisestati kõik CAD mudelid ükshaaval Comsolisse, märkides mähiste parameetrid: mähistraadi läbimõõdud mähiste keerdude arvud sisendpinge sagedused voolusuunad Passiivproovik antud seadmes koosneb kolmest koondtsentrilisest solenoidmähisest, mis on paigutatud 90-kraadiste nurkade all kolmele ristuvale tasandile. Mähiste parameetrid on toodud tabelis 1. Iga mähisega teostati kolm mõõtmist, muutes väljaallika ja mõõtemähise vahekaugust. Mähiste vahekaugusi muudame sammuga 5 mm. Mähiste vahekaugused on 31
32 vastavalt 5 mm, 10 mm ja 15 mm. Katsete tulemused on toodud tabelites 2, 3 ja 4. Tabelitest on võimalik välja lugeda sisendpinge U1 väärtus väljaallikale ja indutseeritud väljundpinge U2 mõõtemähises. Tabel 2. Laborikatse elektromagnetlähivälja mõõtmine Katse 1 Mähis 1 Katse 1 Mähis 1 Mähiste asendi skeem teineteise suhtes Mähiste omavaheline kaugus Sisendparameetrid väljaallikale 5 mm Sisendpinge U1=5Vpp Sisendsignaali sagedus 1 MHz 5mm ilma metallplaatideta Sisendpinge U1=5Vpp Sisend signaali sagedus 1 MHz 10 mm Sisendpinge U1=5Vpp Sisendsignaali sagedus 1 MHz 15 mm Sisendpinge U1=5Vpp Sisendsignaali sagedus 1 MHz Indutseeritud väljundprameetrid mõõtemähises Indutseeritud väljundpinge efektiivväärtus U2=47,5 mv Väljundsagedus 1 MHz Indutseeritud väljundpinge efektiivväärtus U2=49 mv Väljundsagedus 1 MHz Indutseeritud väljundpinge efektiivväärtus U2=14,6 mv Väljundsagedus 1 MHz Indutseeritud väljundpinge efektiivväärtus U2=9,3 mv Väljundsagedus 1 MHz Järeldus (Tabel 2): Katse 1. Tabeli 2 mõõtetulemustest võib järeldada, et väljaallika ja mõõtemähise vahelise õhupilu suurenemisel väheneb indutseeritav väljundpinge U2. Mõõtemähise väljundpinge U2 väheneb, kuna kaugenedes väljaallikast nõrgeneb väljaallika poolt tekitatav magnetväli ja seega ei indutseerita mõõtemähises enam nii suurt pinget U2. Võrreldes mõõtemähise ja väljaallika vahekaugusi selgub, et mõõtemähise väljundpinge U2 muutus on kõige suurem 5 mm ja 10 mm vahe puhul. Mõõtemähise liigutamisel 10 mm-lt 15 mm-le toimunud mõõtemähise väljundpinge muutus on oluliselt väiksem võrreldes mähiste omavahelise kauguse muutusega 5 mm-lt 10 mm-le. 32
33 Tabelist selgub, et mõõtmiskeskkonnas asuv metallplaat mõjutab mõõtetulemust. Metallplaadiga teostatud katse mõõtemähise väljundpinge U2 on madalam kui ilma metallplaadita tulemus. Magnetiliste jõujoonte muutust metallplaadi olemasolul mõõtekeskkonnas on võimalik võrrelda ka joonistel 18 ja 19. Metallplaadi olemasolul mõõtekeskkonnas tekib suhteliselt kõrge sageduse tõttu 1 MHz metallplaadil pinnaefekt, kus magnetjõujoontel on lihtsam liikuda metallplaadi pinnal kui õhus. Tabel 3. Laborikatse elektromagnetlähivälja mõõtmine Katse 2 Mähis 2 Mähiste asendi skeem teineteise suhtes Mähiste omavaheline kaugus Katse 2 Mähis 2 Sisendparameetrid väljaallikale 5 mm Sisendpinge U1=5Vpp Sisendsignaali sagedus 1 MHz 10 mm Sisendpinge U1=5Vpp Sisendsignaali sagedus 1 MHz 15 mm Sisendpinge U1=5Vpp Sisendsignaali sagedus 1 MHz Indutseeritud väljundparameetrid mõõtemähises Indutseeritud väljundpinge efektiivväärtus U2=321,36 µv Väljundsagedus 1 MHz Indutseeritud väljundpinge efektiivväärtus U2=73,36 µv Väljundsagedus 1 MHz Indutseeritud väljundpinge efektiivväärtus U2=66,36 µv Väljundsagedus 1 MHz Järeldus (Tabel 3) Katse 2. Tabelis 3 on samuti näha sõltuvus väljaallika ja mõõtemähise vahekaugusest. Mida suurem on vahekaugus, seda vähem väljundpinget U2 indutseeritakse mõõtemähises. Tabeli 2 ja Tabeli 3 võrdlusest võib järeldada, et mõõtemähise asendist väljaallika suhtes sõltub kui palju väljundpinget U2 indutseeritakse mõõtemähisesse. 33
34 Tabel 4. Laborikatse elektromagnetlähivälja mõõtmine Katse 3 Mähis 3 Mähiste asendi skeem teineteise suhtes Mähiste omavaheline kaugus Katse 3 Mähis 3 Sisendparameetrid väljaallikale 5 mm Sisendpinge U1=5Vpp Sisendsignaali sagedus 1 MHz 10 mm Sisendpinge U1=5Vpp Sisendsignaali sagedus 1 MHz 15 mm Sisendpinge U1=5Vpp Sisendsignaali sagedus 1 MHz Indutseeritud väljundprameetrid mõõtemähises Indutseeritud väljundpinge efektiivväärtus U2=76,2 µv Väljundsagedus 1 MHz Indutseeritud väljundpinge efektiivväärtus U2=74,6 µv Väljundsagedus 1 MHz Indutseeritud väljundpinge efektiivväärtus U2=56,68 µv Väljundsagedus 1 MHz Järeldus (Tabel 4): Katse 3. Tabelist 4 võib järeldada, et mõõtemähise liigutamisel väljaallika suhtes muutub indutseeritav väljundpinge nagu eelnevatelgi katsetel. Katse 3 mõõtemähis on mõõtmetelt kõige väiksem ja Tabelis 4 toodud väljundpingete võrdlusest võib väita, et mõõtemähisel 3 on kõige väiksem väljundpingete kõikumise vahe, muutes mõõtemähise ja väljaallika vahekaugust. Modelleerimis katse visuaal näited Comsol Multiphysicsist 5.2: Comsol Multiphysics 5.2 modelleerimistarkvaras on võimalik lisaks tabeliandmete võrdlusele luua ka visuaalseid võrdlusmaterjale. Järgnevalt vaadeldakse joonisel 14 olevaid mähiseid. Ülemine mähis on mõõtemähis ja alumine mähis on väljaallikas. Joonis pärineb Katsest 1 ja mähiste omavaheline kaugus on 5 mm. Joonisel on näha väljaallika voolutihedus. Sisendpinge väljaallikale on 5 Vpp ja sagedus on 1 MHz. Jooniselt 14 on näha, et voolujaotus on mähises ühtlane. Joonisel 15 on toodud mõõtemähis 1 katsest 1. Mõõtemähise ja väljaallika vahe 5 mm. Joonisel 15 on kuvatud indutseeritud voolutihedus mõõtemähises. Mõõtepildi järgi võib järeldada, et 34

35 joonisel kuvatava mähise struktuuri värvierinevus on küll suur ja ebaühtlane, kuid vaadates joonise kõrval olevat skaalat, on näha, et pinge kõikumine on väike. Joonisel on võimalik näha, et mõõtemähise alumist osa läbib palju rohkem magnetjõujooni, seega on ka all servas näha punakamaid laike. Värvide ebaühtlane jaotus on ka osaliselt tingitud programmis valitud mõõtevõrgustiku tihedusest modelleerimisel. Kui valida tihedam mõõtevõrgustik, on küll võimalik saada ühtlasem tulemus, kuid mõõtevõrgustiku tihedamaks muutmisega kaasneb ka kordades pikem arvutusaeg. Joonis 14. Katse 1 Mähis 1 Mähiste vahe 5 mm, voolutihedus toitemähises Joonis 15. Katse 1 Mähis 1 Mähiste vahe 5 mm, indutseeritud voolutihedus mõõtemähises 35

36 Joonisel 16 on näha indutseeritud magnetvootihedus mõõtemähises. Joonise skaala vaatlemisel võib järeldada, et magnetvootihedus on ühtlane terves mähises. Mõnes kohas on näha veidi koondunud magnetvootihedust, kuid kui vaadata joonise kõrval olevat skaalat, siis on selgelt näha, et magnetvootiheduse kõikumised toitemähises on väga väikesed. Seda iseloomustab ka toitemähise poolt indutseeritud magnetväljatihedus joonisel 17 näha olevas mõõtemähises. Jooniselt 17 on võimalik järeldada, et tekkinud magnetväli on tugevam mähise alaservas, kuna alaservast suundub läbi rohkem väljaallika poolt tekitatud magnetjõujooni. Samas jällegi kui vaadata joonise kõrval olevat skaalat, siis arvuliselt erineb magnetväljatihedus mähises väga vähe. Joonis 16. Katse 1 Mähis 1 Mähiste vahe 5 mm, indutseeritud magnetvootihedus mõõtemähises 36

37 Joonis 17. Katse 1 Mähis 1 Mähiste vahe 5 mm Magnetvälja tihedus mõõtemähises Joonisel 18. on näha magnetvälja tiheduse jõujooned. Jõujoonte paiknemine joonisel on suhteliselt ühtlane. Joonisel 18 on näha, kuidas metallplaat muudab jõujoonte kulgemist. Metallplaadile lähenedes kulgevad magnetvälja jõujooned metallplaadi pinnal, kuna magnetvälja jõujoontel on lihtsam liikuda läbi metalli kui läbi õhu. Järgmisel joonisel 19, kus metallplaati ei ole, on näha magnetvälja jõujoonte kulgemine metallivabas keskkonnas. Sellest katsete võrdlusest lähtuvalt projekteeritakse antud töös lähivälja mõõteseade vältides ferromagnetilisi materjale mõõtealale lähemal kui 150 mm. 37


38 Joonis 18. Katse 1 Mähis 1 Mähiste vahe 5 mm Magnetvälja tiheduse jõujooned metallalusplaatidega Joonis 19. Katse 1 Mähis 1 Mähiste vahe 5 mm Magnetvälja tiheduse jõujooned ilma alusmetallplaatideta 38
39 9. CNC MASINA KONSTRUKTSIOON JA KOMPONENDID Esmakatsetuste jaoks kasutati olemasolevat kolmes teljes liikuvat CNC platvormi, mis liigub vajalikult kolmes teljes x, y ja z. CNC masina raam on valmistatud roostevabast terases. Masina liikuva tööaluse materjaliks on 6000 seeria alumiinium ja tööaluse mõõtmed on 180 mm x 180 mm. Kuuljuhikud Hiwin 9 tagavad CNC masina täpsusklassi ±0.05 mm. Masinat liigutatakse steppermootoritega Nema 17 (mudel 42SHD ). Mootorite positsioneerimisjõud on 52 N/cm, mis on piisav teostamaks kiirliikumisi mõõteprotsessis. Mootoreid juhitakse Arduino Mega platvormiga, millel on kontroller Atmega2560 MCU. Mootori driverid on A4988. Graafiline seadme juhtskeem on joonisel 20. Arduino Mega on kontrollerplatvorm, mida kasutatakse paljude prototüüpseadmete juhtimiseks soodsa hinna ja lihtsuse tõttu. Seadme telgede liikumisulatus on X150, Y150, Z150 mm, mis on katsete läbiviimiseks piisav. Seadme gabariitmõõtmed on toodud joonisel 21. Lisaks projekteeriti seadmele vastav kinnitusdetail mõõtemähise kinnitamiseks. Joonis 20. CNC masina juhtskeem 39
40 Joonis 21. Mõõtemasina CNC konstruktsioon 40
41 10. PROTOTÜÜPSEADME JUHTTARKVARA KIRJELDUS Juhttarkvara on kirjutatud Pythonis [16]. Python on programmeerimisplatvorm, kus on võimalik luua vähese ajakuluga katseteks vajalik programm. Pythonis programmi loomisel on abiks suur hulk eelnevalt kasutajaskonna poolt loodud programmimooduleid, mis on korrektselt dokumenteeritud. Probleemide ja küsimuste tekkimisel programmi kirjutamisprotsessi käigus on võimalik abi saada teistelt Pythoni kasutajatelt. Pythoni miinuspoolena võib välja tuua selle mittesobivuse ajakriitilisteks protsesside haldamiseks, kuna ta on interpreteeriv programmeerimiskeel (instruktsioonid tõlgendatakse eelnevalt kompileeritud alamosadeks, tõlkimata koodi masinkoodiks). Seadmete võrdluses välja toodud Singapuri ülikoolis väljatöötatud laboriseade kasutab vabavarana saadaval olevat programmi ChipScan. Algselt kaalutleti antud töös ka ChipScani kasutamist, kuid selgus, et programm on loodud ainult mikrokiipide lähivälja skaneerimiseks. Eesmärgiks sai seatud võimalikult lihtsalt adapteeritava programmi loomine, mida saaks vajadusel ka muuta töötamaks uute või teist tüüpi seadmetega. Pigem on esikohal mõõtetulemuste saamine ja salvestamine. Juhttarkvara saadab mõõteseadme arvutile ainult koordinaatteljestiku parameetrid ja mõõtetingimuste andmed ja vastu võtab vaid veateateid ja mõõtetulemusi salvestamiseks ja visualiseerimiseks (kuvamiseks kasutajale). Esialgseks ülesande lihtsustamiseks ei ole hetkel vaadeldud mõõtetulemuste töötlemise tarkvarasid, pigem kasutame selleks vastavalt soovile/vajadusele tabelarvutustarkvara, kuna andmed salvestatakse csv formaadis, mida suudavad lugeda kõik peamised andmetöötlustarkvarad. 41
42 Katse sooritamisetapid : I. Mõõdetav objekt (trükkplaat) paigutatakse mõõtmisseade tööalasse. II. Seadme juhtimiseks loodud programmis määratakse mõõteala suurus ning lugemite arv: pikkuses, laiuses ja kõrguses. III. Juhtprogrammist valitakse ühe mõõtmise ajaline pikkus, ajaliselt pikem mõõtmine annab täpsema tulemuse, kuid pikendab mõõtmisprotsessi koguaega. IV. Katse mõõtmine käivitatakse seadme arvutile alustuskäsu saatmisega ning edasi sooritab seade mõõtmised autonoomselt, tuginedes juhtprogrammis kasutaja poolt etteantud parameetritel. V. Mõõtmisprotsessi lõppedes andmed salvestuvad. Pärast mõõtmiste lõppu saab andmed salvestada. Võimalus on ka vaadata mõõtetulemusi otse programmist. Selleks tuleb valida huvipakkuvad sagedusvahemikud ning kõrgus. Andmeid näidatakse kasutajaliideses vastavalt legendile värvides, mis vastavad eri väljatugevustele (Joonis 23 ja Joonis 24). Tarkvara suhtleb mõõteseadmega USB ühendusel virtuaalse COMport teel. Plokkskeemis Joonisel 22 on välja toodud mõõteahela toimimisjärjestus alates proovikust kuni andmete kuvamiseni. Prototüüpseadme proovik koosneb kolmest mõõtemähisest, mille signaalid töödeldakse, seejärel mõõdetakse saadud väärtused ja salvestatakse programmi. Signaalitöötlus hõlmab endas signaali jagamist läbi kõrge takistuse erinevateks signaalivahemikeks, seejärel liigub signaal läbi ribapääsufiltri sageduste eraldamiseks. Signaali võimendatakse mõõtmistäpsuse suurendamiseks ja võimendustegur on seadistatav vastavalt vajadusele. Seejärel signaali alandatakse ja piiratakse zener-dioodiga, et vältida liiga tugeva signaaliga ADC kahjustamist või küllastumist. Saadud signaali mõõdab analoog-digital muundur, misjärel mikrokontroller kogub andmed ja arvutab keskmise väärtuse. Pärast igat mõõtmist saadetakse saadud tulemus juhtarvutisse. Juhtarvutis olevas kasutajaliideses on võimalik andmeid vaadelda või siis andmeid väljastada töötluseks mõne teise andmetöötlusprogrammi tarbeks. 42

43 Joonis 22. Prototüüpseadme mõõteahela loogikaskeem 43


44 Joonis 23. Sagedusvahemike seos kuvatava pildi (mõõtetulemuse) värvidega juhtarvuti kasutajaliideses Joonis 24. Mõõtetulemuse kuvamine programmis vastavalt magnetvälja tugevusele 44

45 11. ELEKTROMAGNETILISE LÄHIVÄLJA MÕÕTMISKATSED LABORITINGIMUSTES Elektromagnetlähivälja katsemõõtmiste kirjeldus Katsemõõtmiste teostamiseks kasutati Tallinna Tehnikaülikooli elektroenergeetika ja mehhatroonika instituudi elektromagnetilise ühilduvuse laboris olemasolevaid katseseadmeid. Katseseadmete tehnilised parameetrid sobisid ja olid piisavad katsete läbiviimiseks. Programmeeritav lainekuju/funktsioonigeneraator oli Rigol DG5252, EMI test-ressiiver Rohde & Schwarz ESL6 ja Tektronix proovik 3Z80. Seadmete tehnilised parameetrid on ära toodud tabelites 5, 6 ja Katses kasutatud seadmed: Tabel 5. Programmeeritav lainekuju/funktsioonigeneraator [17] Programmeeritav lainekuju/funktsioonigeneraator Rigol DG5252 Joonis 25. Programmeeritav lainekuju/funktsioonigeneraator Rigol DG
 Resolutsioon 14 bit Siinus Kandiline Tõusev Impulss Müra Sinc Eksponent ECG Gauss HaverSine Lorentz Dual-Tone DC Tabel 6.")
46 Tehnilised parameetrid: Lainekujud: Kanalite arv 2 Sagedus < 150 MHz Diskreetimissagedus 1 GSa/s Eraldusvõime 1 μhz Amplituud 5 mv V (50 Ω) 10 mv V (tühijooks) Resolutsioon 14 bit Siinus Kandiline Tõusev Impulss Müra Sinc Eksponent ECG Gauss HaverSine Lorentz Dual-Tone DC Tabel 6. EMI test-ressiiver [18] EMI test-ressiiver Rohde & Schwarz ESL6 Joonis 26. EMI test-ressiiver Rohde & Schwarz ESL6 Tehnilised parameetrid: Impedants 50 Ω Pistikutüüp N-emane Sagedusvahemik 9 khz... 3 GHz Resolutsioon 1 Hz Sagedusulatus 0 Hz, 10 Hz... 6 GHz Ülesvõtuaeg: 1 μs (0 Hz) 2.5 ms (10 Hz GHz) 5 ms ( GHz) 10 ms (>3 GHz) Filtrid: 46
47 IF 3 db filtrid 10 Hz MHz (1/3 sammuga) EMI 6 db filtrid 200 Hz, 9 khz, 1 MHz FFT filtrid 1 Hz khz (1/3 sammuga) Detektorid: Max. tippväärtus Min. tippväärtus RMS Keskmine CISPR-Keskmine (EMI) CISPR-RMS (EMI) Kvaasitippväärtus (EMI) Funktsioonid: Puhas/Otse Max. hoid Keskmine Min. hoid Mõõtepunkte: Max. alalispinge: 50 V Max. RF võimsus: 30 dbm (1 W) Max. RF tippvõimsus: 36 dbm (4 W, <3 s) Tabel 7. Tektronix proovik 3Z80 Tektronix proovik 3Z80 : Tehnilised parameetrid: Proovikut on võimalik kasutada kahes eri režiimis korrutatud arvuga 10 või 1 X1 X MHz 6 MHz 10 MΩ 1 MΩ Katses kasutatud Tektronix prooviku kalibreerimine Signaaligeneraatori väljund oli 50 Ω ESL6 sisend oli 50 Ω Juhe 50 Ω Prooviku takistus 1 MΩ Kalibreerimise KATSE 1 (ideaalse juhtmega 50 Ω) 47
48 Signaali väljund 100 mv P-P, amplituud 50 mv Mõõdeti keskmist väljundit, tulemus 31,93 mv - peaaegu ideaalse juhtmega Kalibreerimise KATSE 2 (proovik) Signaali väljund 100 mv P-P, amplituud 50 mv Mõõdeti keskmist väärtust 8,72 mv Tektronix prooviku sumbuvus K on arvutatud valemis (8). K = 31,93 mv 8,72 mv = 3,662 (8) Elektromagnetilise lähivälja mõõtmiskatsed laboris Elekrtomagnetilise lähivälja mõõtmiskatses laboritingimustel kasutati ülalmainitud laboriseadmeid: programmeeritav lainekuju/funktsioonigeneraator Rigol DG5252, EMI test-ressiiver Rohde & Schwarz ESL6 ja Tektronix proovik 3Z80. Katsekehad olid kinnitatud kolmeteljelise CNC masina külge, tänu millele õnnestus mõõteproovikut vastavalt soovile ja vajadusele liigutada. Mõõtmaks lähivälja kasutati magnetvälja allikana mähist. Mähise kasuks otsustati, kuna mähise genereeritud magnetvälja on võimalik täpselt kirjeldada programmis Comsol Multiphysicsis. Trükkplaadil genereeritavate magnetväljade kirjeldamine oleks palju komplitseeritum, kui mitte isegi võimatu. Seetõttu otsustasime kasutada mähist, mille algparameetrid olid teada (mähise parameetrid toodud Tabelis 8). Tabel 8. Magnetvälja genereeriva mähise parameetrid Katse mähis Välis Sise Mähise Keerdude Traadi Traadi diameeter diameeter kõrgus arv läbimõõt materjal 20,7 mm 12 mm 0,6 mm 470 0,063 mm Vask CNC masina töölauale asetasime katseks mähise (väljaallika), mille sisendklemmidele pandi peale toitepinge 5 Vpp sagedusega 1 MHz signaaligeneraatorist Rigol DG

49 Lähiväljamõõteproovik ühendasti Rohde & Schwarz ESL6 spektrianalüsaatoriga, kasutades selleks Tektronixs proovikut 3Z80. Katseseadmete ühendusskeemi on toodud joonisel 27. Joonis 27. Mõõteseadme paiknemisskeem laboris Katsed viidi läbi kõigi kolme mõõtemähisega, liigutades mõõtemähiseid 5mm sammuga väljaallika suhtes. Mõõtemähis asetati väljaallika tsentrisse. Mõõtmist alustati Mähisest 1. Mähise 1 ja väljaallika kaugus teineteisest oli 5 mm. Järgnevalt teostati mõõtetulemuste salvestamine ja liigutati mõõtemähis 10 mm kaugusele väljaallikast. Jällegi teostati mõõtmine ja mõõtetulemuste salvestamine, liigutades mõõtemähise 15 mm kaugusele väljaallikast. Samasugused protseduurid ja andmete salvestamine viidi läbi ka järgi jäänud kahe teise mõõtemähisega. Võrdlemaks Comsol Multiphysicsis 5.2 ja laboris saadud mõõtetulemusi tuleb arvesse võtta laboris kasutatud ühendusjuhtme (prooviku) sumbuvustegurit K, mille väärtuse saime teada ühendusjuhtme kalibreerimisega Tallinna Tehnikaülikooli 49

50 Elektroenergeetika ja mehhatroonika instituudi elektromagnetilise ühilduvuse laboratooriumis. K väärtus on K= 3,662. See tähendab, et kõik laboris mõõdetud tulemused tuleb läbi korrutada 3,662-ga, et saaks võrrelda tulemusi Comsol Multiphysicsis 5.2 saadutega. Tabel 9. Mähis 1 Katse 1 Mähis 1 Katse 1 Andmed Graafik mõõteseadme ekraanilt Mähiste asendi skeem teineteise suhtes Sisendsignaal: Sagedus 1 MHz Sisendpinge U1= 5 Vpp Amplituut 2,5 Siinussignaal Väljundsignaal: Väljundpinge U2= 9,67 mv RMS Sagedus 1 MHz Kahe mähise vahe 5 mm. Ülemine mähis on mõõtemähis. Alumine mähis on toitemähis. 50
51 Tabel 10. Mähis 1 Katse 2 Mähis 1 Katse 2 Andmed Graafik mõõteseadme ekraanilt Mähiste asendi skeem teineteise suhtes Sisendsignaal: Sagedus 1 MHz Sisendpinge U1= 5 Vpp Amplituut 2,5 Siinussignaal Väljundsignaal: Väljundpinge U2= 3,62 mv RMS Sagedus 1 MHz Kahe mähise vahe 10 mm. Ülemine mähis on mõõtemähis. Alumine mähis on toitemähis. Tabel 11. Mähis 1 Katse 3 Mähis 1 Katse 3 Andmed Graafik mõõteseadme ekraanilt Mähiste asendi skeem teineteise suhtes Sisendsignaal: Sagedus 1 MHz Sisendpinge U1= 5 Vpp Amplituut 2,5 Siinussignaal Väljundsignaal: Väljundpinge U2= 2,36 mv RMS Sagedus 1 MHz Kahe mähise vahe 15 mm. Ülemine mähis on mõõtemähis. Alumine mähis on toitemähis. 51
52 Tabel 12. Mähis 2 Katse 1 Mähis 2 Katse 1 Andmed Graafik mõõteseadme ekraanilt Mähiste asendi skeem teineteise suhtes Sisendsignaal: Sagedus 1 MHz Sisendpinge U1= 5 Vpp Amplituut 2,5 Siinussignaal Väljundsignaal: Väljundpinge U2= 80,34 µv RMS Sagedus 1 MHz Kahe mähise vahe 5 mm. Ülemine mähis on mõõtemähis. Alumine mähis on toitemähis. Tabel 13. Mähis 2 Katse 2 Mähis 2 Katse 2 Andmed Graafik mõõteseadme ekraanilt Mähiste asendi skeem teineteise suhtes Sisendsignaal: Sagedus 1 MHz Sisendpinge U1= 5 Vpp Amplituut 2,5 Siinussignaal Väljundsignaal: Väljundpinge U2= 18,34 µv RMS Sagedus 1 MHz Kahe mähise vahe 10 mm. Ülemine mähis on mõõtemähis. Alumine mähis on toitemähis. 52

53 Tabel 14. Mähis 2 Katse 3 Mähis 2 Katse 3 Andmed Graafik mõõteseadme ekraanilt Mähiste asendi skeem teineteise suhtes Sisendsignaal: Sagedus 1 MHz Sisendpinge U1= 5 Vpp Amplituut 2,5 Siinussignaal Väljundsignaal: Väljundpinge U2= 16,83 µv RMS Sagedus 1 MHz Kahe mähise vahe 15 mm. Ülemine mähis on mõõtemähis. Alumine mähis on toitemähis. Tabel 15. Mähis 3 Katse 1 Mähis 3 Katse 1 Andmed Graafik mõõteseadme ekraanilt Mähiste asendi skeem teineteise suhtes Sisendsignaal: Sagedus 1 MHz Sisendpinge U1= 5 Vpp Amplituut 2,5 Siinussignaal Väljundsignaal: Väljundpinge U2= 19,87 µv RMS Sagedus 1 MHz Kahe mähise vahe 5 mm. Ülemine mähis on mõõtemähis. Alumine mähis on toitemähis. 53

54 Tabel 16. Mähis 3 Katse 2 Mähis 3 Katse 2 Andmed Graafik mõõteseadme ekraanilt Mähiste asendi skeem teineteise suhtes Sisendsignaal: Sagedus 1 MHz Sisendpinge U1= 5 Vpp Amplituut 2,5 Siinussignaal Väljundsignaal: Väljundpinge U2= 18,85 µv RMS Sagedus 1 MHz Kahe mähise vahe 10 mm. Ülemine mähis on mõõtemähis. Alumine mähis on toitemähis. Tabel 17. Mähis 3 Katse 3 Mähis 3 Katse 3 Andmed Graafik mõõteseadme ekraanilt Mähiste asendi skeem teineteise suhtes Sisendsignaal: Sagedus 1 MHz Sisendpinge U1= 5 Vpp Amplituut 2,5 Siinussignaal Väljundsignaal: Väljundpinge U2= 14,42 µv RMS Sagedus 1 MHz Kahe mähise vahe 15 mm. Ülemine mähis on mõõtemähis. Alumine mähis on toitemähis. 54
55 Järeldus: Esimeses katsevoorus Mähisega 1 tehtud Katse 1 (tabelid nr 9, 10 ja 11) tulemustest võib järeldada, et mõõtemähises indutseeritav väljundpinge on otseses sõltuvuses väljaallika ja mõõtemähise vahekaugusest. Sama selgus ka Comsol Multiphysics programmiga katset modelleerides. Mida suuremaks muutub vahekaugus, seda vähem indutseeritakse väljundpinget U2. Tabeli 9 ja Tabeli 10 võrdlemisel on näha, kuidas mõõtemähise ja väljaallika vahe suurenemisel 5 mm võrra väheneb väljund pinge U2 peaaegu kolm korda. Katses 2 (tabelid 12, 13 ja 14) on samuti näha, et mõõtemähise ja väljaallika omavahelisest kaugusest sõltub indutseeritav väljapinge. Mähist 1 ja Mähist 2 võrreldes on näha, et väljaallika ja mõõtemähise vahekauguste muutusel tekkis suur langus väljundpinges U2 Mähisel 2. Kui võrrelda tabelitest Mähist 2 ja Mähist 3, on näha, et gabariitmõõtmetelt väiksemas Mähises 3 ei teki mõõtemähise ja väljaallika vahekauguse muutudes enam nii suurt väljundpinge langemist. Korrutades labori mõõtetulemused prooviku (Tektronix proovik 3Z80) sumbuvusteguriga K= 3,662, saame võrrelda tulemusi programmis Comsol Multiphysicsis 5.2 läbiviidutega. Comsol Multiphysicsis 5.2 teostatud katsete modelleerimistulemuste võrdlemisel laboritingimustes tehtud katsetega selgub, et mõõtetulemuste omavaheline viga on 25,3%. Vea arvutamine (9) (10) (11): a 100% b = x (9) kus a-labori mõõtetulemus korrutatud sumbuvusteguriga K b-comsol Multiphysicsis mõõtetulemus x- protsendiline kahe mõõetetulemuse erinevus ( Andmed võetud Mähis 1 Katse 1 mõlemast mõõtmis katsest nii Comsol Multiphysicsis 5.2 kui ka laborikatsest) 55
56 a = 9,67 3,662 = 35,5 (10) x = 35,5 100% 47,5 = 25,3% (11) Mõõtetulemuste omavahelise vea suuruse 25,3% võivad põhjustada mitmed tegurid: halb kontakt mõõtemähise ja EMI test-ressiiver vahelise juhtme klemmidel häiringud mõõtmiste ajal mõõtelabori keskonnas mõõtemähise ebakorrapärasem kuju võrreldes perfektse geomeetrilise kujuga CAD joonisel, mis sisestati Comsol mõõtetarkvarasse mähistsentrite omavahelise telgsuse halve Laboratoorsete katsete ja arvutis mõõdetud tulemuste erinevus oli 25,3 %, mis on uurimistöö lubatud piirides. Võib väita, et elektromagnetlähivälja mõõtemetoodika on rakendatav antud seadmel. 56

57 12. TULEVIKU ARENDUSTEGEVUSED Arendustöö jätkub. Liigutakse edasi mõõteseadme mõõteprooviku arenduse ja katsetustega. Samaaegselt on valmimas ka CAD mudel uuest mõõteseadme konstruktsioonist. Mõõteseadme raami konstrueerimisel on võetud eesmärgiks mõõteala läheduses mitte kasutada magneetivaid materjale. See tähendab, et seadme mõõteproovikust raadiusega 150 mm ei leidu ühtegi ferromagnetilist materjali. Mõõteseadme tööaluse mõõtmed on hetkel planeeritud 300 mm x 400 mm. Uut seadme raami on näha joonistelt 29 ja 30. Jooniselt 29 on näha, et uuel seadmel kasutatakse üles ja alla liikuvat töölauda, mis annab võimaluse teostada mõõtmisi ka suuremagabariidiliste seadmetega. Jooniselt 28 on näha seadme Y-telje ülesehitus. Y-telg on projekteeritud võimalikult kergeks, et liikuvat massi, mis tekitab vibratsioone oleks minimaalselt. Y- telje keerukad koostedetailid on võimalik 3D printida Tallinna Tehnikaülikooli mehaanika ja tööstustehnika instituudi laboratooriumis laserpaagutusmeetodil printeriga EOS Formiga P100. [19] Joonis 28. Projekteeritava mõõteseadme Y-telje süsteem 57

58 Joonis 29. Arendatav mõõteseadme konstruktsioon ilma ümbriskorpuseta Joonis 30. Arendatav mõõteseadme konstruktsioon koos ümbriskorpusega. 58
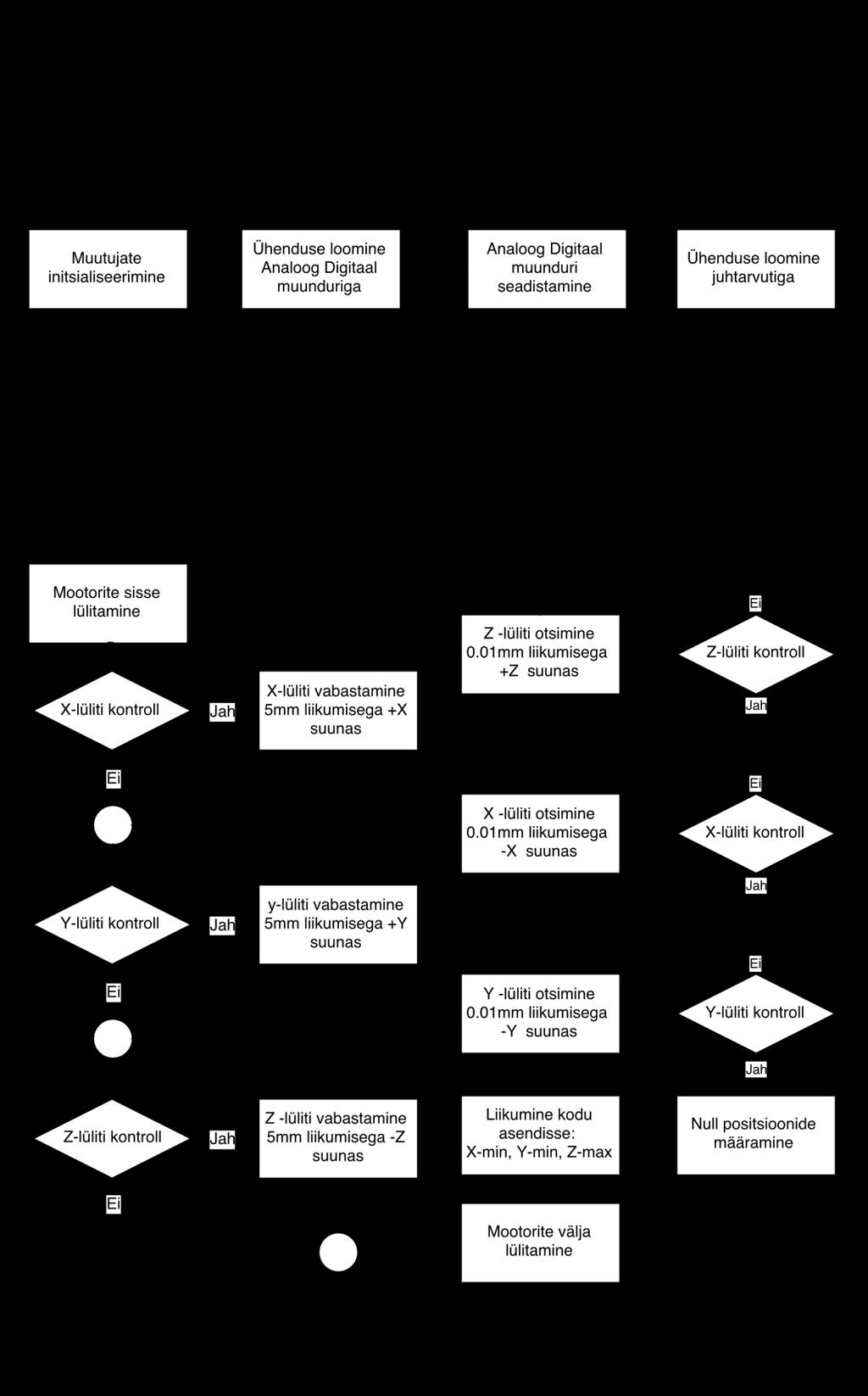
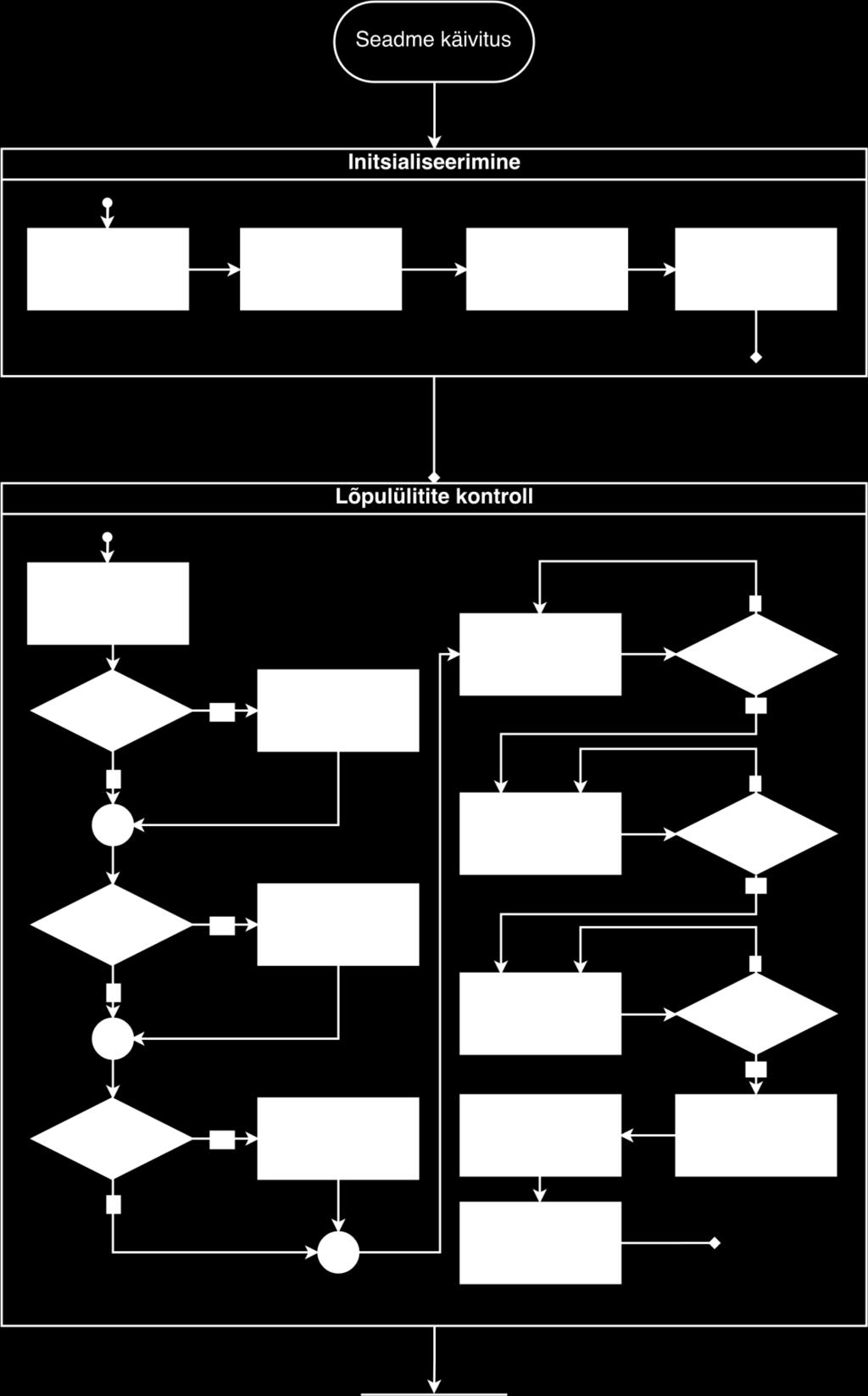
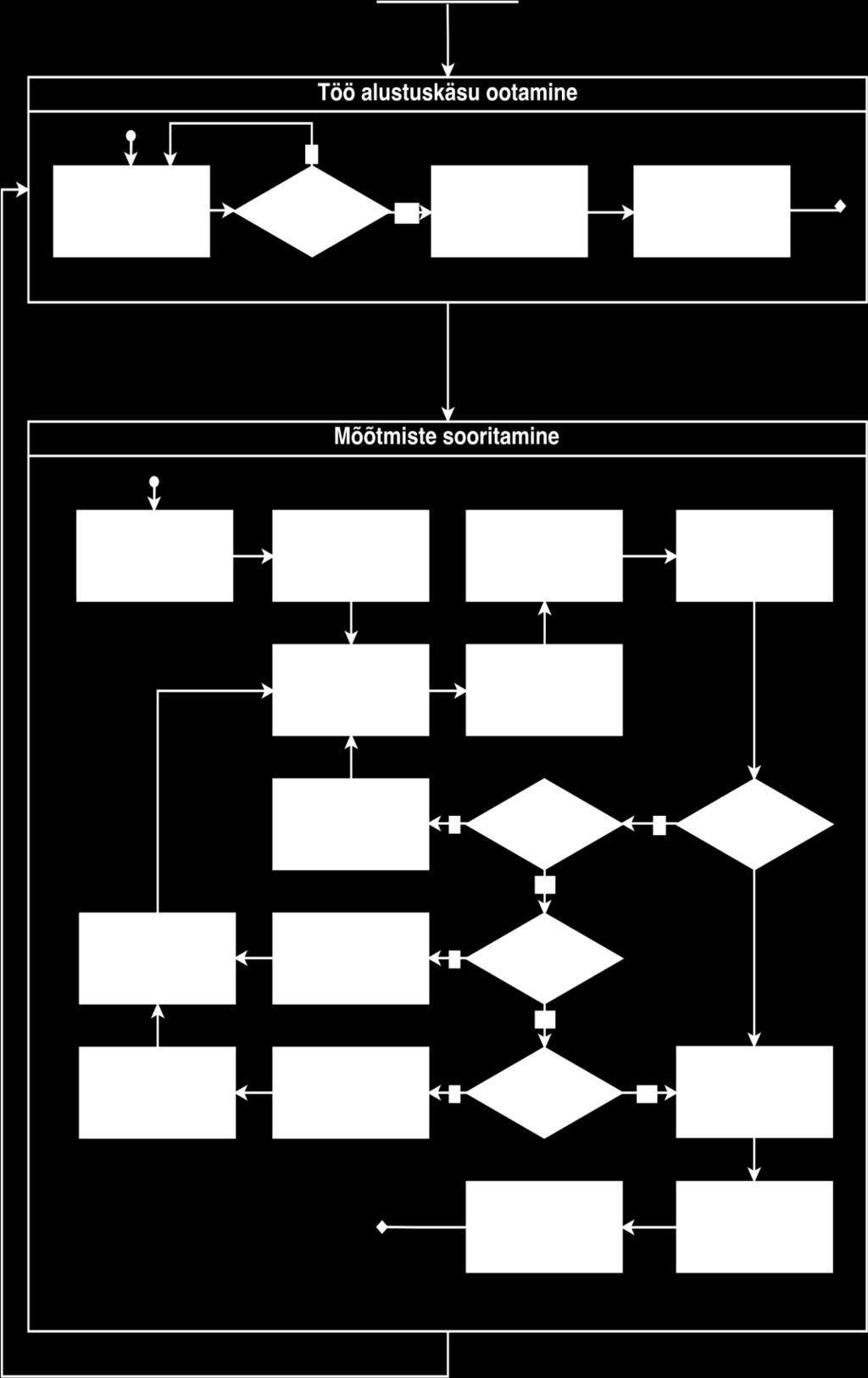
59 Mõõteseadme toimimisalgoritmi selgitus (joonisel 31): Initsialiseerimine Määratakse muutujate algväärtused, komponendid ning luuakse ühendus juhtarvutiga. Lõpulülitite kontroll Tulenevalt seadme absoluutse positsioneerimise puudumisest tuleb igal käivitusel leida telgede nullasendid masinal olevate lõpulülitite abil. Töö alustuskäsu ootamine Pärast käivitust ootab seade alustuskäsku, millega saadetakse ka info mõõteala ning resolutsiooni kohta. Mõõtmiste sooritamine Mõõtmine toimub sirgjoontena vastavalt X, Y ja Z telje sihiliselt, kui X teljes toimuvad mõõtmised on lõppenud, liigub seade järgmise Y telje reani ning liigub tagasi X teljele mõõtmisi tehes (samalaadselt toimib ka Z teljel). Mõõtmiste ajaks lülitatakse mootorid välja, et vältida soovimatu signaali tuvastamist. Pärast mõõtmise lõpetamist läheb seade tagasi algolekusse ning ootab uue alustuskäsu saatmist. Mõõteseadme arendamine Tallinna Tehnikaülikooli elektroenergeetika ja mehhatroonika instituudi elektromagnetilise ühilduvuse laboris jätkub. 59
60 60

61 Joonis 31. Arendatava mõõteseadme toimimisalgoritm 61
DE_loeng5
 Digitaalelektroonika V loeng loogikalülitused KMOP transistoridega meeldetuletus loogikalülitused TTL baasil baaslülitus inverteri tunnusjooned ja hilistumine LS lülitus kolme olekuga TTL ja avatud kollektoriga
Digitaalelektroonika V loeng loogikalülitused KMOP transistoridega meeldetuletus loogikalülitused TTL baasil baaslülitus inverteri tunnusjooned ja hilistumine LS lülitus kolme olekuga TTL ja avatud kollektoriga
Antennide vastastikune takistus
 Antennide vastastikune takistus Eelmises peatükis leidsime antenni kiirgustakistuse arvestamata antenni lähedal teisi objekte. Teised objektid, näiteks teised antennielemendid, võivad aga mõjutada antenni
Antennide vastastikune takistus Eelmises peatükis leidsime antenni kiirgustakistuse arvestamata antenni lähedal teisi objekte. Teised objektid, näiteks teised antennielemendid, võivad aga mõjutada antenni
Tarkvaraline raadio Software defined radio (SDR) Jaanus Kalde 2017
 Jaanus Kalde 2017") Tarkvaraline raadio Software defined radio (SDR) Jaanus Kalde 2017 Sissejuhatus Raadiosidest üldiselt Tarkvaraline raadio Kuidas alustada 2 Raadioside Palju siinussignaale õhus Info edastamiseks moduleerid
Tarkvaraline raadio Software defined radio (SDR) Jaanus Kalde 2017 Sissejuhatus Raadiosidest üldiselt Tarkvaraline raadio Kuidas alustada 2 Raadioside Palju siinussignaale õhus Info edastamiseks moduleerid
Automaatjuhtimise alused Automaatjuhtimissüsteemi kirjeldamine Loeng 2
 Automaatjuhtimise alused Automaatjuhtimissüsteemi kirjeldamine Loeng 2 Laplace'i teisendus Diferentsiaalvõrrandite lahendamine ilma tarkvara toeta on keeruline Üheks lahendamisvõtteks on Laplace'i teisendus
Automaatjuhtimise alused Automaatjuhtimissüsteemi kirjeldamine Loeng 2 Laplace'i teisendus Diferentsiaalvõrrandite lahendamine ilma tarkvara toeta on keeruline Üheks lahendamisvõtteks on Laplace'i teisendus
B120_10 estonian.cdr
 Alati seal, et teid aidata Registreerige oma toode ja otsige abi koduleheküljelt www.philips.com/welcome B120 Beebimonitor Küsimus? Kontakteeruge Philipsiga Eestikeelne kasutusjuhend 2 Valgussensor USB
Alati seal, et teid aidata Registreerige oma toode ja otsige abi koduleheküljelt www.philips.com/welcome B120 Beebimonitor Küsimus? Kontakteeruge Philipsiga Eestikeelne kasutusjuhend 2 Valgussensor USB
29 th International Physics Olympiad Reykjavik, Iceland Eksperimentaalne võistlus Esmaspäev, 6. juuli 1998 Kasutada olev aeg: 5 tundi Loe esmalt seda:
 9 th International Physics Olympiad Reykjavik, Iceland Eksperimentaalne võistlus Esmaspäev, 6. juuli 1998 Kasutada olev aeg: 5 tundi Loe esmalt seda: 1. Kasuta ainult korraldajate antud sulepead.. Kasuta
9 th International Physics Olympiad Reykjavik, Iceland Eksperimentaalne võistlus Esmaspäev, 6. juuli 1998 Kasutada olev aeg: 5 tundi Loe esmalt seda: 1. Kasuta ainult korraldajate antud sulepead.. Kasuta
Microsoft Word - Toetuste veebikaardi juhend
 Toetuste veebikaardi juhend Toetuste veebikaardi ülesehitus Joonis 1 Toetuste veebikaardi vaade Toetuste veebikaardi vaade jaguneb tinglikult kaheks: 1) Statistika valikute osa 2) Kaardiaken Statistika
Toetuste veebikaardi juhend Toetuste veebikaardi ülesehitus Joonis 1 Toetuste veebikaardi vaade Toetuste veebikaardi vaade jaguneb tinglikult kaheks: 1) Statistika valikute osa 2) Kaardiaken Statistika
CPA4164 USB 2.0 kõrgekvaliteediline videoadapter KASUTUSJUHEND 1. PEATÜKK - Ülevaade 1.1 Tutvustus CPA4164 USB 2.0 videoadapter võimaldab teil arvutis
 CPA4164 USB 2.0 kõrgekvaliteediline videoadapter KASUTUSJUHEND 1. PEATÜKK - Ülevaade 1.1 Tutvustus CPA4164 USB 2.0 videoadapter võimaldab teil arvutisse laadida ja redigeerida erinevatest analoogvideo
CPA4164 USB 2.0 kõrgekvaliteediline videoadapter KASUTUSJUHEND 1. PEATÜKK - Ülevaade 1.1 Tutvustus CPA4164 USB 2.0 videoadapter võimaldab teil arvutisse laadida ja redigeerida erinevatest analoogvideo
Majandus- ja kommunikatsiooniministri 10. aprill a määrus nr 26 Avaliku konkursi läbiviimise kord, nõuded ja tingimused sageduslubade andmiseks
 Majandus- ja kommunikatsiooniministri 10. aprill 2013. a määrus nr 26 Avaliku konkursi läbiviimise kord, nõuded ja tingimused sageduslubade andmiseks maapealsetes süsteemides üldkasutatava elektroonilise
Majandus- ja kommunikatsiooniministri 10. aprill 2013. a määrus nr 26 Avaliku konkursi läbiviimise kord, nõuded ja tingimused sageduslubade andmiseks maapealsetes süsteemides üldkasutatava elektroonilise
Microsoft Word - ref - Romet Piho - Tutorial D.doc
 Tartu Ülikool Andmetöötluskeel "Tutorial D" realisatsiooni "Rel" põhjal Referaat aines Tarkvaratehnika Romet Piho Informaatika 2 Juhendaja Indrek Sander Tartu 2005 Sissejuhatus Tänapäeval on niinimetatud
Tartu Ülikool Andmetöötluskeel "Tutorial D" realisatsiooni "Rel" põhjal Referaat aines Tarkvaratehnika Romet Piho Informaatika 2 Juhendaja Indrek Sander Tartu 2005 Sissejuhatus Tänapäeval on niinimetatud
Slide 1
 ERAÜ XVII TALVEPÄEV 2015 Uue põlvkonna LDMOS transistorvõimendid 14.veebruar 2015 Mart Tagasaar, ES2NJ Sissejuhatus Alates 2010.aastast on turule ilmunud uue põlvkonna LDMOS transistorid võimsusega 600-1400W,
ERAÜ XVII TALVEPÄEV 2015 Uue põlvkonna LDMOS transistorvõimendid 14.veebruar 2015 Mart Tagasaar, ES2NJ Sissejuhatus Alates 2010.aastast on turule ilmunud uue põlvkonna LDMOS transistorid võimsusega 600-1400W,
Väljaandja: Vabariigi Valitsus Akti liik: määrus Teksti liik: terviktekst Redaktsiooni jõustumise kp: Redaktsiooni kehtivuse lõpp:
 Väljaandja: Vabariigi Valitsus Akti liik: määrus Teksti liik: terviktekst Redaktsiooni jõustumise kp: 05.12.2004 Redaktsiooni kehtivuse lõpp: 29.04.2007 Avaldamismärge: Töökeskkonna füüsikaliste ohutegurite
Väljaandja: Vabariigi Valitsus Akti liik: määrus Teksti liik: terviktekst Redaktsiooni jõustumise kp: 05.12.2004 Redaktsiooni kehtivuse lõpp: 29.04.2007 Avaldamismärge: Töökeskkonna füüsikaliste ohutegurite
Tartu Ülikool
 Tartu Ülikool Code coverage Referaat Koostaja: Rando Mihkelsaar Tartu 2005 Sissejuhatus Inglise keelne väljend Code coverage tähendab eesti keeles otse tõlgituna koodi kaetust. Lahti seletatuna näitab
Tartu Ülikool Code coverage Referaat Koostaja: Rando Mihkelsaar Tartu 2005 Sissejuhatus Inglise keelne väljend Code coverage tähendab eesti keeles otse tõlgituna koodi kaetust. Lahti seletatuna näitab
Microsoft Word - emv_1_161_Kohtla_Nomme RTVJ.doc
 ELEKTROMAGNETVÄLJA MÕÕTMISTE PROTOKOLL nr 6/4-6-1/161 01.08.2012 EAK akrediteeritud L128 1. Mõõtmiste tellija: TERVISEAMETI KESKKONNATERVISE OSAKOND aadress: Paldiski mnt 81, tel.: 694 3500, faks: 694
ELEKTROMAGNETVÄLJA MÕÕTMISTE PROTOKOLL nr 6/4-6-1/161 01.08.2012 EAK akrediteeritud L128 1. Mõõtmiste tellija: TERVISEAMETI KESKKONNATERVISE OSAKOND aadress: Paldiski mnt 81, tel.: 694 3500, faks: 694
Sissejuhatus mehhatroonikasse MHK0120
 Sissejuhatus mehhatroonikasse MHK0120 5. nädala loeng Raavo Josepson raavo.josepson@ttu.ee Pöördliikumine Kulgliikumine Kohavektor Ԧr Kiirus Ԧv = d Ԧr dt Kiirendus Ԧa = dv dt Pöördliikumine Pöördenurk
Sissejuhatus mehhatroonikasse MHK0120 5. nädala loeng Raavo Josepson raavo.josepson@ttu.ee Pöördliikumine Kulgliikumine Kohavektor Ԧr Kiirus Ԧv = d Ԧr dt Kiirendus Ԧa = dv dt Pöördliikumine Pöördenurk
Microsoft Word - requirements.doc
 Dokumendi ajalugu: Versioon Kuupäev Tegevus Autor 1.0 04.03.2008 Dokumendi loomine Madis Abel 1.1 09.03.2008 Kasutuslugude loomine Madis Abel 1.2 12.03.2008 Kasutuslugude täiendused Andres Kalle 1.3 13.03.2008
Dokumendi ajalugu: Versioon Kuupäev Tegevus Autor 1.0 04.03.2008 Dokumendi loomine Madis Abel 1.1 09.03.2008 Kasutuslugude loomine Madis Abel 1.2 12.03.2008 Kasutuslugude täiendused Andres Kalle 1.3 13.03.2008
Tootmine_ja_tootlikkus
 TOOTMINE JA TOOTLIKKUS Juhan Lehepuu Leiame vastused küsimustele: Mis on sisemajanduse koguprodukt ja kuidas seda mõõdetakse? Kuidas mõjutavad sisemajanduse koguprodukti muutused elatustaset? Miks sõltub
TOOTMINE JA TOOTLIKKUS Juhan Lehepuu Leiame vastused küsimustele: Mis on sisemajanduse koguprodukt ja kuidas seda mõõdetakse? Kuidas mõjutavad sisemajanduse koguprodukti muutused elatustaset? Miks sõltub
Microsoft Word - QOS_2008_Tallinn_OK.doc
 GSM mobiiltelefoniteenuse kvaliteet Tallinnas, juuni 2008 Sideteenuste osakond 2008 Kvaliteedist üldiselt GSM mobiiltelefonivõrgus saab mõõta kümneid erinevaid tehnilisi parameetreid ja nende kaudu võrku
GSM mobiiltelefoniteenuse kvaliteet Tallinnas, juuni 2008 Sideteenuste osakond 2008 Kvaliteedist üldiselt GSM mobiiltelefonivõrgus saab mõõta kümneid erinevaid tehnilisi parameetreid ja nende kaudu võrku
VRB 2, VRB 3
 Tehniline andmeleht Sadulventiilid (PN 6) VR - tee ventiil, sise- ja väliskeere 3-tee ventiil, sise- ja väliskeere Kirjeldus Omadused Mullikindel konstruktsioon Mehaaniline snepperühendus täiturmootoriga
Tehniline andmeleht Sadulventiilid (PN 6) VR - tee ventiil, sise- ja väliskeere 3-tee ventiil, sise- ja väliskeere Kirjeldus Omadused Mullikindel konstruktsioon Mehaaniline snepperühendus täiturmootoriga
Caterpillar Inc. 100 NE Adams Street, Peoria, IL USA Meedianumber U9NE8460 Tegevusdokument Lisateave GRADE süsteemi komponentide nõuetele vastav
 Tegevusdokument Lisateave GRADE süsteemi komponentide nõuetele vastavuse teave 1 Sisukord lk Ohutusmärgid ja -sildid... 3 Ohutusteated... 4 Muud sildid... 5 Üldine ohuteave... 6 Edastamine... 6 Sissejuhatus...
Tegevusdokument Lisateave GRADE süsteemi komponentide nõuetele vastavuse teave 1 Sisukord lk Ohutusmärgid ja -sildid... 3 Ohutusteated... 4 Muud sildid... 5 Üldine ohuteave... 6 Edastamine... 6 Sissejuhatus...
Ülesanne #5: Käik objektile Kooli ümberkujundamist vajava koha analüüs. Ülesanne #5 juhatab sisse teise poole ülesandeid, mille käigus loovad õpilased
 Ülesanne #5: Käik objektile Kooli ümberkujundamist vajava koha analüüs. Ülesanne #5 juhatab sisse teise poole ülesandeid, mille käigus loovad õpilased oma kujunduse ühele kohale koolis. 5.1 Kohavalik Tiimi
Ülesanne #5: Käik objektile Kooli ümberkujundamist vajava koha analüüs. Ülesanne #5 juhatab sisse teise poole ülesandeid, mille käigus loovad õpilased oma kujunduse ühele kohale koolis. 5.1 Kohavalik Tiimi
Lisa I_Müra modelleerimine
 LISA I MÜRA MODELLEERIMINE Lähteandmed ja metoodika Lähteandmetena kasutatakse AS K-Projekt poolt koostatud võimalikke eskiislahendusi (trassivariandid A ja B) ning liiklusprognoosi aastaks 2025. Kuna
LISA I MÜRA MODELLEERIMINE Lähteandmed ja metoodika Lähteandmetena kasutatakse AS K-Projekt poolt koostatud võimalikke eskiislahendusi (trassivariandid A ja B) ning liiklusprognoosi aastaks 2025. Kuna
Microsoft Word - Karu 15 TERMO nr 527.doc
 Termoülevaatus nr.57 (57/1. Märts 8) Hoone andmed Aadress Lühikirjeldus Karu 15, Tallinn Termopildid Kuupäev 6.1.8 Tuule kiirus Õhutemperatuur -1,1 o C Tuule suund Osalesid Kaamera operaator Telefoni nr.
Termoülevaatus nr.57 (57/1. Märts 8) Hoone andmed Aadress Lühikirjeldus Karu 15, Tallinn Termopildid Kuupäev 6.1.8 Tuule kiirus Õhutemperatuur -1,1 o C Tuule suund Osalesid Kaamera operaator Telefoni nr.
PÄRNU TÄISKASVANUTE GÜMNAASIUM ESITLUSE KOOSTAMISE JUHEND Pärnu 2019
 PÄRNU TÄISKASVANUTE GÜMNAASIUM ESITLUSE KOOSTAMISE JUHEND Pärnu 2019 SISUKORD 1. SLAIDIESITLUS... 3 1.1. Esitlustarkvara... 3 1.2. Slaidiesitluse sisu... 3 1.3. Slaidiesitluse vormistamine... 4 1.3.1 Slaidid...
PÄRNU TÄISKASVANUTE GÜMNAASIUM ESITLUSE KOOSTAMISE JUHEND Pärnu 2019 SISUKORD 1. SLAIDIESITLUS... 3 1.1. Esitlustarkvara... 3 1.2. Slaidiesitluse sisu... 3 1.3. Slaidiesitluse vormistamine... 4 1.3.1 Slaidid...
Estonian_TBW-106UB(V1).cdr
.cdr") Lühike paigaldusjuhend TBW-106UB H/W: V1 Sisukord... 1 1. Enne alustamist... 1 2. Kuidas paigaldada... 3. Bluetooth adapteriseadistamine... 2 5 Tõrkeotsing... 7 Version 02.17.2009 1. Enne alustamist Pakendi
Lühike paigaldusjuhend TBW-106UB H/W: V1 Sisukord... 1 1. Enne alustamist... 1 2. Kuidas paigaldada... 3. Bluetooth adapteriseadistamine... 2 5 Tõrkeotsing... 7 Version 02.17.2009 1. Enne alustamist Pakendi
Loeng03
 Loeng 03 Failiõigused ja -manipulatsioon Operatsioonisüsteemide administreerimine ja sidumine I233 Katrin Loodus, Tallinn 2015 Failid ja kataloogid Mis on fail? Linuxi laadsetes süsteemides on kõik failid
Loeng 03 Failiõigused ja -manipulatsioon Operatsioonisüsteemide administreerimine ja sidumine I233 Katrin Loodus, Tallinn 2015 Failid ja kataloogid Mis on fail? Linuxi laadsetes süsteemides on kõik failid
normaali
 AS TEEKARU T-2 Tallinn-Tartu-Võru Luhamaa mnt kiirustabloode mõõtetulemused enne ja pärast märgi aktiveerimist. Vahearuanne Tallinn 2 AS TEEKARU LIIKLUSOSAKOND T-2 Tallinn-Tartu-Võru Luhamaa mnt kiirustabloode
AS TEEKARU T-2 Tallinn-Tartu-Võru Luhamaa mnt kiirustabloode mõõtetulemused enne ja pärast märgi aktiveerimist. Vahearuanne Tallinn 2 AS TEEKARU LIIKLUSOSAKOND T-2 Tallinn-Tartu-Võru Luhamaa mnt kiirustabloode
I klassi õlipüüdur kasutusjuhend
 I-KLASSI ÕLIPÜÜDURITE PAIGALDUS- JA HOOLDUSJUHEND PÜÜDURI DEFINITSIOON JPR -i õlipüüdurite ülesandeks on sadevee või tööstusliku heitvee puhastamine heljumist ja õlijääkproduktidest. Püüduri ülesehitus
I-KLASSI ÕLIPÜÜDURITE PAIGALDUS- JA HOOLDUSJUHEND PÜÜDURI DEFINITSIOON JPR -i õlipüüdurite ülesandeks on sadevee või tööstusliku heitvee puhastamine heljumist ja õlijääkproduktidest. Püüduri ülesehitus
Word Pro - digiTUNDkaug.lwp
 / näide: \ neeldumisseadusest x w x y = x tuleneb, et neeldumine toimub ka näiteks avaldises x 2 w x 2 x 5 : x 2 w x 2 x 5 = ( x 2 ) w ( x 2 ) [ x 5 ] = x 2 Digitaalskeemide optimeerimine (lihtsustamine)
/ näide: \ neeldumisseadusest x w x y = x tuleneb, et neeldumine toimub ka näiteks avaldises x 2 w x 2 x 5 : x 2 w x 2 x 5 = ( x 2 ) w ( x 2 ) [ x 5 ] = x 2 Digitaalskeemide optimeerimine (lihtsustamine)
6 tsooniga keskus WFHC MASTER RF 868MHz & 4 või 6 tsooniga alaseade SLAVE RF KASUTUSJUHEND 6 tsooniga WFHC RF keskus & 4 või 6 tsooniga alaseade SLAVE
 6 tsooniga keskus WFHC MASTER RF 868MHz & 4 või 6 tsooniga alaseade SLAVE RF KASUTUSJUHEND 6 tsooniga WFHC RF keskus & 4 või 6 tsooniga alaseade SLAVE RF 868MHz 3-6 EE 1. KASUTUSJUHEND 6 tsooniga WFHC
6 tsooniga keskus WFHC MASTER RF 868MHz & 4 või 6 tsooniga alaseade SLAVE RF KASUTUSJUHEND 6 tsooniga WFHC RF keskus & 4 või 6 tsooniga alaseade SLAVE RF 868MHz 3-6 EE 1. KASUTUSJUHEND 6 tsooniga WFHC
Microsoft Word - EVS_ISO_IEC_27001;2014_et_esilehed.doc
 EESTI STANDARD EVS-ISO/IEC 27001:2014 INFOTEHNOLOOGIA Turbemeetodid Infoturbe halduse süsteemid Nõuded Information technology Security techniques Information security management systems Requirements (ISO/IEC
EESTI STANDARD EVS-ISO/IEC 27001:2014 INFOTEHNOLOOGIA Turbemeetodid Infoturbe halduse süsteemid Nõuded Information technology Security techniques Information security management systems Requirements (ISO/IEC
P9_10 estonian.cdr
 Registreerige oma toode ja saage abi kodulehelt www.philips.com/welcome P9/10 Eestikeelne kasutusjuhend 2 Ühendage P9 kõlar Bluetooth ühenduse kaudu oma Bluetooth seadmega, nagu näiteks ipadiga, iphone'iga,
Registreerige oma toode ja saage abi kodulehelt www.philips.com/welcome P9/10 Eestikeelne kasutusjuhend 2 Ühendage P9 kõlar Bluetooth ühenduse kaudu oma Bluetooth seadmega, nagu näiteks ipadiga, iphone'iga,
Juhend nutiterminali seadistamiseks ja kaardimaksete vastuvõtmiseks Ingenico Link/2500 ja icmp
 Juhend nutiterminali seadistamiseks ja kaardimaksete vastuvõtmiseks Ingenico Link/2500 ja icmp Terminali seadistamine Lülita telefonis või tahvelarvutis (edaspidi telefonis) sisse Bluetooth. (1) 1 1 Mudel
Juhend nutiterminali seadistamiseks ja kaardimaksete vastuvõtmiseks Ingenico Link/2500 ja icmp Terminali seadistamine Lülita telefonis või tahvelarvutis (edaspidi telefonis) sisse Bluetooth. (1) 1 1 Mudel
VRG 2, VRG 3
 Tehniline andmeleht Sadulventiilid (PN 16) 2-tee ventiil, väliskeermega 3-tee ventiil, väliskeermega Kirjeldus Omadused Mullikindel konstruktsioon Mehhaaniline snepperühendus täiturmootoriga MV(E) 335,
Tehniline andmeleht Sadulventiilid (PN 16) 2-tee ventiil, väliskeermega 3-tee ventiil, väliskeermega Kirjeldus Omadused Mullikindel konstruktsioon Mehhaaniline snepperühendus täiturmootoriga MV(E) 335,
Solaariumisalongides UVseadmete kiiritustiheduse mõõtmine. Tallinn 2017
 Solaariumisalongides UVseadmete kiiritustiheduse mõõtmine. Tallinn 2017 1. Sissejuhatus Solaariumides antakse päevitusseansse kunstliku ultraviolettkiirgusseadme (UV-seadme) abil. Ultraviolettkiirgus on
Solaariumisalongides UVseadmete kiiritustiheduse mõõtmine. Tallinn 2017 1. Sissejuhatus Solaariumides antakse päevitusseansse kunstliku ultraviolettkiirgusseadme (UV-seadme) abil. Ultraviolettkiirgus on
DJI GOGGLES Kiirjuhend V1.0
 DJI GOGGLES Kiirjuhend V1.0 DJI Goggles DJI Goggles on mugavad prillid, mis on disainitud mugavaks FPV lendamiseks DJI toodetega. Nad loovad ultra-kõrge kvaliteediga pildi, minimaalse viivitusega pikamaa
DJI GOGGLES Kiirjuhend V1.0 DJI Goggles DJI Goggles on mugavad prillid, mis on disainitud mugavaks FPV lendamiseks DJI toodetega. Nad loovad ultra-kõrge kvaliteediga pildi, minimaalse viivitusega pikamaa
Andmed arvuti mälus Bitid ja baidid
 Andmed arvuti mälus Bitid ja baidid A bit about bit Bitt, (ingl k bit) on info mõõtmise ühik, tuleb mõistest binary digit nö kahendarv kahe võimaliku väärtusega 0 ja 1. Saab näidata kahte võimalikku olekut
Andmed arvuti mälus Bitid ja baidid A bit about bit Bitt, (ingl k bit) on info mõõtmise ühik, tuleb mõistest binary digit nö kahendarv kahe võimaliku väärtusega 0 ja 1. Saab näidata kahte võimalikku olekut
Tarvikud _ Puhurid ja vaakumpumbad INW külgkanaliga Air and Vacuum Components in-eco.co.ee
 Tarvikud _ Puhurid ja vaakumpumbad INW külgkanaliga Air and Vacuum Components in-eco.co.ee IN-ECO, spol. s r.o. Radlinského 13 T +421 44 4304662 F +421 44 4304663 E info@in-eco.sk Õhufiltrid integreeritud
Tarvikud _ Puhurid ja vaakumpumbad INW külgkanaliga Air and Vacuum Components in-eco.co.ee IN-ECO, spol. s r.o. Radlinského 13 T +421 44 4304662 F +421 44 4304663 E info@in-eco.sk Õhufiltrid integreeritud
TELLIJAD Riigikantselei Eesti Arengufond Majandus- ja Kommunikatsiooniministeerium KOOSTAJAD Olavi Grünvald / Finantsakadeemia OÜ Aivo Lokk / Väärtusi
 TELLIJAD Riigikantselei Eesti Arengufond Majandus- ja Kommunikatsiooniministeerium KOOSTAJAD Olavi Grünvald / Finantsakadeemia OÜ Aivo Lokk / Väärtusinsener OÜ Tallinnas 14.04.2014 Uuring Energiamajanduse
TELLIJAD Riigikantselei Eesti Arengufond Majandus- ja Kommunikatsiooniministeerium KOOSTAJAD Olavi Grünvald / Finantsakadeemia OÜ Aivo Lokk / Väärtusinsener OÜ Tallinnas 14.04.2014 Uuring Energiamajanduse
Makett 209
 Veerežiimi muutuste modelleerimine füüsilise ja arvutimudeli abil Karin Robam, Veiko Karu, Ingo Valgma, Helena Lind. TTÜ mäeinstituut Abstrakt Tänapäeval on mitmete keskkonnaprobleemide lahendamiseks ja
Veerežiimi muutuste modelleerimine füüsilise ja arvutimudeli abil Karin Robam, Veiko Karu, Ingo Valgma, Helena Lind. TTÜ mäeinstituut Abstrakt Tänapäeval on mitmete keskkonnaprobleemide lahendamiseks ja
efo09v2pke.dvi
 Eesti koolinoorte 56. füüsikaolümpiaad 17. jaanuar 2009. a. Piirkondlik voor. Põhikooli ülesanded 1. (VÄRVITILGAD LAUAL) Ühtlaselt ja sirgjooneliselt liikuva horisontaalse laua kohal on kaks paigalseisvat
Eesti koolinoorte 56. füüsikaolümpiaad 17. jaanuar 2009. a. Piirkondlik voor. Põhikooli ülesanded 1. (VÄRVITILGAD LAUAL) Ühtlaselt ja sirgjooneliselt liikuva horisontaalse laua kohal on kaks paigalseisvat
Microsoft PowerPoint - Keskkonnamoju_rus.ppt
 Keskkonnakonverents 07.01.2011 Keskkonnamõju hindamine ja keskkonnamõju strateegiline hindamine on avalik protsess kuidas osaleda? Elar Põldvere (keskkonnaekspert, Alkranel OÜ) Kõik, mis me õpime täna,
Keskkonnakonverents 07.01.2011 Keskkonnamõju hindamine ja keskkonnamõju strateegiline hindamine on avalik protsess kuidas osaleda? Elar Põldvere (keskkonnaekspert, Alkranel OÜ) Kõik, mis me õpime täna,
Eesti kõrgusmudel
 Meie: 04.06.2002 nr 4-3/3740 Küsimustik Eesti maapinna kõrgusmudeli spetsifikatsioonide selgitamiseks Eestis on juba aastaid tõstatatud küsimus täpse maapinna kõrgusmudeli (edaspidi mudel) koostamisest
Meie: 04.06.2002 nr 4-3/3740 Küsimustik Eesti maapinna kõrgusmudeli spetsifikatsioonide selgitamiseks Eestis on juba aastaid tõstatatud küsimus täpse maapinna kõrgusmudeli (edaspidi mudel) koostamisest
28 29
 28 29 CARGO TIPPER KÕRGE VÕIMEKUS MADAL RASKUSKESE Iga BJT haagis on konstrueeritud ühte eesmärki silmas pidades - pakkuda teile parimat. Haagised on valmistatud vastavalt klientide tagasisidele, lähtudes
28 29 CARGO TIPPER KÕRGE VÕIMEKUS MADAL RASKUSKESE Iga BJT haagis on konstrueeritud ühte eesmärki silmas pidades - pakkuda teile parimat. Haagised on valmistatud vastavalt klientide tagasisidele, lähtudes
KINNITATUD Tallinna Ehituskooli direktori käskkirjaga nr 1-1/18 KOOSKÕLASTATUD Tallinna Ehituskooli nõukogu protokoll nr 10 Õppe
 KINNITATUD Tallinna Ehituskooli direktori 14.03.2017 käskkirjaga nr 1-1/18 KOOSKÕLASTATUD Tallinna Ehituskooli nõukogu 13.03.2017 protokoll nr 10 Õppekavarühm Õppekava nimetus Puitmaterjalide töötlus CNC
KINNITATUD Tallinna Ehituskooli direktori 14.03.2017 käskkirjaga nr 1-1/18 KOOSKÕLASTATUD Tallinna Ehituskooli nõukogu 13.03.2017 protokoll nr 10 Õppekavarühm Õppekava nimetus Puitmaterjalide töötlus CNC
Tehniline andmeleht Sadulventiilid (PN 16) VRG 2 2-tee ventiil, väliskeermega VRG 3 3-tee ventiil, väliskeermega Kirjeldus Ventiilid on kasutatavad ko
 VRG 2 2-tee ventiil, väliskeermega VRG 3 3-tee ventiil, väliskeermega Kirjeldus Ventiilid on kasutatavad ko") Tehniline andmeleht Sadulventiilid (PN 16) VRG 2 2-tee ventiil, väliskeermega VRG 3 3-tee ventiil, väliskeermega Kirjeldus Ventiilid on kasutatavad koos AMV(E) 335, AMV(E) 435 ja AMV(E) 438 SU täiturmootoritega.
Tehniline andmeleht Sadulventiilid (PN 16) VRG 2 2-tee ventiil, väliskeermega VRG 3 3-tee ventiil, väliskeermega Kirjeldus Ventiilid on kasutatavad koos AMV(E) 335, AMV(E) 435 ja AMV(E) 438 SU täiturmootoritega.
Control no:
 Smart Access Driftsprocedure A. Eeltingimused... 2 1. Nutitelefoni ühilduvus... 2 2. Kaabli valik... 2 a. Apple devices (Apple'i seadmed) (iphone 4/4S)... 2 b. Apple devices (Apple'i seadmed) (iphone 5/5c/5s)...
Smart Access Driftsprocedure A. Eeltingimused... 2 1. Nutitelefoni ühilduvus... 2 2. Kaabli valik... 2 a. Apple devices (Apple'i seadmed) (iphone 4/4S)... 2 b. Apple devices (Apple'i seadmed) (iphone 5/5c/5s)...
Technology Esimene PowerSense tehnoloogiaga elektromehaaniline tööriist
 www.klauke.com Technology Esimene PowerSense tehnoloogiaga elektromehaaniline tööriist Ajad muutuvad. Kompaktne ja maksimaalselt tõhus Kõikjal kus vaja kiiret, kergekaalulist ja effektiivset tööriista
www.klauke.com Technology Esimene PowerSense tehnoloogiaga elektromehaaniline tööriist Ajad muutuvad. Kompaktne ja maksimaalselt tõhus Kõikjal kus vaja kiiret, kergekaalulist ja effektiivset tööriista
raamat5_2013.pdf
 Peatükk 5 Prognoosiintervall ja Usaldusintervall 5.1 Prognoosiintervall Unustame hetkeks populatsiooni parameetrite hindamise ja pöördume tagasi üksikvaatluste juurde. On raske ennustada, milline on huvipakkuva
Peatükk 5 Prognoosiintervall ja Usaldusintervall 5.1 Prognoosiintervall Unustame hetkeks populatsiooni parameetrite hindamise ja pöördume tagasi üksikvaatluste juurde. On raske ennustada, milline on huvipakkuva
Microsoft Word - TallinnLV_lihtsustatud_manual_asutuse_juhataja_ doc
 Tallinna Linnavalitsuse sõnumisaatja kasutusjuhend asutuse juhatajale Sisukord 1. Süsteemi sisenemine...2 2. Parooli lisamine ja vahetamine...2 3. Ametnike lisamine ametiasutuse juurde...2 4. Saatjanimede
Tallinna Linnavalitsuse sõnumisaatja kasutusjuhend asutuse juhatajale Sisukord 1. Süsteemi sisenemine...2 2. Parooli lisamine ja vahetamine...2 3. Ametnike lisamine ametiasutuse juurde...2 4. Saatjanimede
Microsoft Word - Iseseisev töö nr 1 õppeaines.doc
 TALLINNA TEHNIKAÜLIKOOL Raadio- ja sidetehnika instituut Mikrolainetehnika õppetool Iseseisva töö nr 1 juhend õppeaines Sideseadmete mudeldamine Ionosfäärse sidekanali mudeldamine Tallinn 2006 1 Teoreetilised
TALLINNA TEHNIKAÜLIKOOL Raadio- ja sidetehnika instituut Mikrolainetehnika õppetool Iseseisva töö nr 1 juhend õppeaines Sideseadmete mudeldamine Ionosfäärse sidekanali mudeldamine Tallinn 2006 1 Teoreetilised
Renovation of Historic Wooden Apartment Buildings
 Hoonete õhuleke ja selle mõõtmine Click to edit Master title style Endrik Arumägi Targo Kalamees Teadmistepõhine ehitus 26.04.2018 Piirdetarindite õhulekked Iseloomustavad suurused õhuvahetuvuskordsus
Hoonete õhuleke ja selle mõõtmine Click to edit Master title style Endrik Arumägi Targo Kalamees Teadmistepõhine ehitus 26.04.2018 Piirdetarindite õhulekked Iseloomustavad suurused õhuvahetuvuskordsus
Microsoft Word - DB2_TECEfloor Raumthermostat Analog_EN_est
 1 TECEfloori toatermostaat Analog (RT-A ja RT-A HK) TECEfloori toatermostaat Analog on kvaliteetne toatermostaat ruumi temperatuuri registreerimiseks ja muuutmiseks ning pakub maksimaalset kasutusmugavust.
1 TECEfloori toatermostaat Analog (RT-A ja RT-A HK) TECEfloori toatermostaat Analog on kvaliteetne toatermostaat ruumi temperatuuri registreerimiseks ja muuutmiseks ning pakub maksimaalset kasutusmugavust.
Ecophon Master Rigid A Sobib klassiruumi ja kohtadesse, kus hea akustika ja kõnest arusaadavus on esmatähtsad ning avatavus vajalik. Ecophon Master Ri
 Ecophon Master Rigid A Sobib klassiruumi ja kohtadesse, kus hea akustika ja kõnest arusaadavus on esmatähtsad ning avatavus vajalik. Ecophon Master Rigid A on nähtava liistusüsteemiga. Plaadid kinnitatakse
Ecophon Master Rigid A Sobib klassiruumi ja kohtadesse, kus hea akustika ja kõnest arusaadavus on esmatähtsad ning avatavus vajalik. Ecophon Master Rigid A on nähtava liistusüsteemiga. Plaadid kinnitatakse
KIIRJUHEND Lugege kiirjuhend enne seadme kasutamist hoolikalt läbi. Kõik tärniga (*) märgitud juhised kehtivad WLAN + 3G mudelitele (Lenovo B6000-H(V)
 märgitud juhised kehtivad WLAN + 3G mudelitele (Lenovo B6000-H(V)") KIIRJUHEND Lugege kiirjuhend enne seadme kasutamist hoolikalt läbi. Kõik tärniga (*) märgitud juhised kehtivad WLAN + 3G mudelitele (Lenovo B6000-H(V) / Lenovo B8000-H). Tehnilised andmed Mudeli nimetus
KIIRJUHEND Lugege kiirjuhend enne seadme kasutamist hoolikalt läbi. Kõik tärniga (*) märgitud juhised kehtivad WLAN + 3G mudelitele (Lenovo B6000-H(V) / Lenovo B8000-H). Tehnilised andmed Mudeli nimetus
M (12)+lisa Mario Narbekov, Dmitri Tiško, Ingrid Leemet Liiklus- ja raudteemüra mõõtmised Vaksali 3 ja 11, Hurda 38, Tammsa
+lisa Mario Narbekov, Dmitri Tiško, Ingrid Leemet Liiklus- ja raudteemüra mõõtmised Vaksali 3 ja 11, Hurda 38, Tammsa") 190687-M01-11242 1(12)+lisa Mario Narbekov, Dmitri Tiško, Ingrid Leemet 14.06.2019 Liiklus- ja raudteemüra mõõtmised Vaksali 3 ja 11, Hurda 38, Tammsaare 8, Tartu Tellija: Tartu Linnavalitsus Tellimus:
190687-M01-11242 1(12)+lisa Mario Narbekov, Dmitri Tiško, Ingrid Leemet 14.06.2019 Liiklus- ja raudteemüra mõõtmised Vaksali 3 ja 11, Hurda 38, Tammsaare 8, Tartu Tellija: Tartu Linnavalitsus Tellimus:
遥控器使用说明书(ROHS) ALPA-CS349-R09D(E)-0301(内容)
 ALPA-CS349-R09D(E)-0301(内容)") KASUTUSJUHEND SIIRDATAV KDITSIEER KAUGJUHTIMISPULDI KASUTUSJUHEND AM-5PR(N) Täname teid, et olete soetanud endale meie õhukonditsioneeri Palun lugege hoolikalt käesolevat kasutusjuhendit enne seadme kasutamist
KASUTUSJUHEND SIIRDATAV KDITSIEER KAUGJUHTIMISPULDI KASUTUSJUHEND AM-5PR(N) Täname teid, et olete soetanud endale meie õhukonditsioneeri Palun lugege hoolikalt käesolevat kasutusjuhendit enne seadme kasutamist
Ruumipõhiste ventilatsiooniseadmete Click to edit toimivus Master title style korterelamutes Alo Mikola Tallinn Tehnikaülikool Teadmistepõhine ehitus
 Ruumipõhiste ventilatsiooniseadmete Click to edit toimivus Master title style korterelamutes Alo Mikola Tallinn Tehnikaülikool Teadmistepõhine ehitus 2014 Peamised kortermajade ventilatsiooni renoveerimislahendused!
Ruumipõhiste ventilatsiooniseadmete Click to edit toimivus Master title style korterelamutes Alo Mikola Tallinn Tehnikaülikool Teadmistepõhine ehitus 2014 Peamised kortermajade ventilatsiooni renoveerimislahendused!
Polünoomi juured Juure definitsioon ja Bézout teoreem Vaadelgem polünoomi kus K on mingi korpus. f = a 0 x n + a 1 x n a n 1 x
 1 5.5. Polünoomi juured 5.5.1. Juure definitsioon ja Bézout teoreem Vaadelgem polünoomi kus K on mingi korpus. f = a 0 x n + a 1 x n 1 +... + a n 1 x + a n K[x], (1) Definitsioon 1. Olgu c K. Polünoomi
1 5.5. Polünoomi juured 5.5.1. Juure definitsioon ja Bézout teoreem Vaadelgem polünoomi kus K on mingi korpus. f = a 0 x n + a 1 x n 1 +... + a n 1 x + a n K[x], (1) Definitsioon 1. Olgu c K. Polünoomi
Mida räägivad logid programmeerimisülesande lahendamise kohta? Heidi Meier
 Mida räägivad logid programmeerimisülesande lahendamise kohta? Heidi Meier 09.02.2019 Miks on ülesannete lahendamise käigu kohta info kogumine oluline? Üha rohkem erinevas eas inimesi õpib programmeerimist.
Mida räägivad logid programmeerimisülesande lahendamise kohta? Heidi Meier 09.02.2019 Miks on ülesannete lahendamise käigu kohta info kogumine oluline? Üha rohkem erinevas eas inimesi õpib programmeerimist.
Microsoft Word - Mesi, kestvuskatsed, doc
 MEEPROOVIDE KESTVUSKATSED Tallinn 2017 Töö nimetus: Meeproovide kestvuskatsed. Töö autorid: Anna Aunap Töö tellija: Eesti Mesinike Liit Töö teostaja: Marja 4D Tallinn, 10617 Tel. 6112 900 Fax. 6112 901
MEEPROOVIDE KESTVUSKATSED Tallinn 2017 Töö nimetus: Meeproovide kestvuskatsed. Töö autorid: Anna Aunap Töö tellija: Eesti Mesinike Liit Töö teostaja: Marja 4D Tallinn, 10617 Tel. 6112 900 Fax. 6112 901
lvk04lah.dvi
 Lahtine matemaatikaülesannete lahendamise võistlus. veebruaril 004. a. Lahendused ja vastused Noorem rühm 1. Vastus: a) jah; b) ei. Lahendus 1. a) Kuna (3m+k) 3 7m 3 +7m k+9mk +k 3 3M +k 3 ning 0 3 0,
Lahtine matemaatikaülesannete lahendamise võistlus. veebruaril 004. a. Lahendused ja vastused Noorem rühm 1. Vastus: a) jah; b) ei. Lahendus 1. a) Kuna (3m+k) 3 7m 3 +7m k+9mk +k 3 3M +k 3 ning 0 3 0,
Tala dimensioonimine vildakpaindel
 Tala dimensioonimine vildakpaindel Ülesanne Joonisel 9 kujutatud okaspuidust konsool on koormatud vertikaaltasandis ühtlase lauskoormusega p ning varda teljega risti mõjuva kaldjõuga (-jõududega) F =pl.
Tala dimensioonimine vildakpaindel Ülesanne Joonisel 9 kujutatud okaspuidust konsool on koormatud vertikaaltasandis ühtlase lauskoormusega p ning varda teljega risti mõjuva kaldjõuga (-jõududega) F =pl.
Microsoft Word - P6_metsamasinate juhtimine ja seadistamine FOP kutsekeskharidus statsionaarne
 MOODULI RAKENDUSKAVA Sihtrühm: forvarderioperaatori 4. taseme kutsekeskhariduse taotlejad Õppevorm: statsionaarne Moodul nr 6 Mooduli vastutaja: Mooduli õpetajad: Metsamasinate juhtimine ja seadistamine
MOODULI RAKENDUSKAVA Sihtrühm: forvarderioperaatori 4. taseme kutsekeskhariduse taotlejad Õppevorm: statsionaarne Moodul nr 6 Mooduli vastutaja: Mooduli õpetajad: Metsamasinate juhtimine ja seadistamine
AG informaatika ainekava PK
 INFORMAATIKA AINEKAVA PÕHIKOOLIS Õppe- ja kasvatuseesmärgid Põhikooli informaatikaõpetusega taotletakse, et õpilane: 1) valdab peamisi töövõtteid arvutil igapäevases õppetöös eelkõige infot otsides, töödeldes
INFORMAATIKA AINEKAVA PÕHIKOOLIS Õppe- ja kasvatuseesmärgid Põhikooli informaatikaõpetusega taotletakse, et õpilane: 1) valdab peamisi töövõtteid arvutil igapäevases õppetöös eelkõige infot otsides, töödeldes
Image segmentation
 Image segmentation Mihkel Heidelberg Karl Tarbe Image segmentation Image segmentation Thresholding Watershed Region splitting and merging Motion segmentation Muud meetodid Thresholding Lihtne Intuitiivne
Image segmentation Mihkel Heidelberg Karl Tarbe Image segmentation Image segmentation Thresholding Watershed Region splitting and merging Motion segmentation Muud meetodid Thresholding Lihtne Intuitiivne
Programmi AnimatorDV Simple+ lühike kasutajajuhend
 Programmi AnimatorDV Simple+ esmane kasutusjuhend Programm AnimatorDV Simple+ on mõeldud animatsioonide loomiseks. Tegemist on tasuta tarkvaraga, mis töötab videoseadmetega (videokaamera, veebikaamera).
Programmi AnimatorDV Simple+ esmane kasutusjuhend Programm AnimatorDV Simple+ on mõeldud animatsioonide loomiseks. Tegemist on tasuta tarkvaraga, mis töötab videoseadmetega (videokaamera, veebikaamera).
Microsoft Word - EHR.docx
 earvekeskus E-ARVE TELLIMUSTE JUHEND 1 Sisukord E-arvete tellimused... 3 Klientide tellimused... 3 E-arve tellimuse lisamine... 3 E-arve tellimuse muutmine... 9 Minu tellimused... 10 Minu tellimuse sisestamine...
earvekeskus E-ARVE TELLIMUSTE JUHEND 1 Sisukord E-arvete tellimused... 3 Klientide tellimused... 3 E-arve tellimuse lisamine... 3 E-arve tellimuse muutmine... 9 Minu tellimused... 10 Minu tellimuse sisestamine...
EESTI STANDARD EVS 927:2017 See dokument on EVS-i poolt loodud eelvaade EHITUSLIK PÕLETATUD PÕLEVKIVI Spetsifikatsioon, toimivus ja vastavus Burnt sha
 EESTI STANDARD EHITUSLIK PÕLETATUD PÕLEVKIVI Spetsifikatsioon, toimivus ja vastavus Burnt shale for building materials Specification, performance and conformity EESTI STANDARDI EESSÕNA See Eesti standard
EESTI STANDARD EHITUSLIK PÕLETATUD PÕLEVKIVI Spetsifikatsioon, toimivus ja vastavus Burnt shale for building materials Specification, performance and conformity EESTI STANDARDI EESSÕNA See Eesti standard
Matemaatiline analüüs IV 1 3. Mitme muutuja funktsioonide diferentseerimine 1. Mitme muutuja funktsiooni osatuletised Üleminekul ühe muutuja funktsioo
 Matemaatiline analüüs IV 1 3. Mitme muutuja funktsioonide diferentseerimine 1. Mitme muutuja funktsiooni osatuletised Üleminekul üe muutuja funktsioonidelt m muutuja funktsioonidele, kus m, 3,..., kerkib
Matemaatiline analüüs IV 1 3. Mitme muutuja funktsioonide diferentseerimine 1. Mitme muutuja funktsiooni osatuletised Üleminekul üe muutuja funktsioonidelt m muutuja funktsioonidele, kus m, 3,..., kerkib
Microsoft PowerPoint - loeng.ppt
 Tarkvaraarendusprotsess Lektor Oleg Mürk olegm@webmedia.ee Webmedia AS www.webmedia.ee Teema Mille poolest erineb üksinda programmeerimine mitmekesi tarkvaraarendamisest? Mitmekesi programmeerimine Mitmekesi
Tarkvaraarendusprotsess Lektor Oleg Mürk olegm@webmedia.ee Webmedia AS www.webmedia.ee Teema Mille poolest erineb üksinda programmeerimine mitmekesi tarkvaraarendamisest? Mitmekesi programmeerimine Mitmekesi
Microsoft Word - essee_CVE ___KASVANDIK_MARKKO.docx
 Tartu Ülikool CVE-2013-7040 Referaat aines Andmeturve Autor: Markko Kasvandik Juhendaja : Meelis Roos Tartu 2015 1.CVE 2013 7040 olemus. CVE 2013 7040 sisu seisneb krüptograafilises nõrkuses. Turvaaugu
Tartu Ülikool CVE-2013-7040 Referaat aines Andmeturve Autor: Markko Kasvandik Juhendaja : Meelis Roos Tartu 2015 1.CVE 2013 7040 olemus. CVE 2013 7040 sisu seisneb krüptograafilises nõrkuses. Turvaaugu
Magnetic MRO
 3D-tehnoloogiad õhusõidukite hoolduses 3D Printimine / Virtuaalreaalsus/ 3D Skänneerimine Pärtel-Peeter Kruuv Interior Workshop supervisor Magnetic MRO Arendused: mis mõjutab, mida rakendada? IT Google
3D-tehnoloogiad õhusõidukite hoolduses 3D Printimine / Virtuaalreaalsus/ 3D Skänneerimine Pärtel-Peeter Kruuv Interior Workshop supervisor Magnetic MRO Arendused: mis mõjutab, mida rakendada? IT Google
Microsoft PowerPoint - IRZ0050_13L.pptx
 15. Hüdroakustilised d infohankesüsteemid id Kirjandus: Arro I. Sonartehnika, Tln., TTÜ kirjastus, 1998 Otsingu sõna: Sonar + signal processing, echo sounding, underwater acoustics, hydroacoustics, active
15. Hüdroakustilised d infohankesüsteemid id Kirjandus: Arro I. Sonartehnika, Tln., TTÜ kirjastus, 1998 Otsingu sõna: Sonar + signal processing, echo sounding, underwater acoustics, hydroacoustics, active
EESTI STANDARD EVS :2003 See dokument on EVS-i poolt loodud eelvaade TERASKONSTRUKTSIOONID Osa 4-2:Vedelikumahutid Steel structures Part 4-2:
 EESTI STANDARD TERASKONSTRUKTSIOONID Osa 4-2:Vedelikumahutid Steel structures Part 4-2: Tanks EESTI STANDARDIKESKUS AMETLIK VÄLJAANNE EESSÕNA Eesti standard Teraskonstruktsioonid. Vedelikumahutid on välja
EESTI STANDARD TERASKONSTRUKTSIOONID Osa 4-2:Vedelikumahutid Steel structures Part 4-2: Tanks EESTI STANDARDIKESKUS AMETLIK VÄLJAANNE EESSÕNA Eesti standard Teraskonstruktsioonid. Vedelikumahutid on välja
PowerPoint Presentation
 12. Traadita kohtvõrk ja hajaspektriside Side IRT3930 Ivo Müürsepp 2 Eksamiajad: Esimene eksamieelne konsultatsioon: T 02.01.2018 kell 10:00 Esimene eksamiaeg: R 05.01.2018 kell 10:00 Teine konsultatsiooniaeg
12. Traadita kohtvõrk ja hajaspektriside Side IRT3930 Ivo Müürsepp 2 Eksamiajad: Esimene eksamieelne konsultatsioon: T 02.01.2018 kell 10:00 Esimene eksamiaeg: R 05.01.2018 kell 10:00 Teine konsultatsiooniaeg
Matemaatika ainekava 8.klass 4 tundi nädalas, kokku 140 tundi Kuu Õpitulemus Õppesisu Algebra (65 t.) Geomeetria (60 t.) Ajavaru kordamiseks (15 õppet
 Geomeetria (60 t.) Ajavaru kordamiseks (15 õppet") Matemaatika ainekava 8.klass 4 tundi nädalas, kokku 140 tundi Algebra (65 t.) Geomeetria (60 t.) Ajavaru kordamiseks (15 õppetundi) septembernovember korrastab hulkliikmeid Hulkliige. Tehted liidab, lahutab
Matemaatika ainekava 8.klass 4 tundi nädalas, kokku 140 tundi Algebra (65 t.) Geomeetria (60 t.) Ajavaru kordamiseks (15 õppetundi) septembernovember korrastab hulkliikmeid Hulkliige. Tehted liidab, lahutab
Õppematerjalide esitamine Moodle is (alustajatele) seminar sarjas Lõunatund e-õppega 12. septembril 2017 õppedisainerid Ly Sõõrd (LT valdkond) ja Dian
 seminar sarjas Lõunatund e-õppega 12. septembril 2017 õppedisainerid Ly Sõõrd (LT valdkond) ja Dian") Õppematerjalide esitamine Moodle is (alustajatele) seminar sarjas Lõunatund e-õppega 12. septembril 2017 õppedisainerid Ly Sõõrd (LT valdkond) ja Diana Lõvi (SV valdkond) Järgmised e-lõunad: 10. oktoober
Õppematerjalide esitamine Moodle is (alustajatele) seminar sarjas Lõunatund e-õppega 12. septembril 2017 õppedisainerid Ly Sõõrd (LT valdkond) ja Diana Lõvi (SV valdkond) Järgmised e-lõunad: 10. oktoober
Microsoft PowerPoint - BPP_MLHvaade_juuni2012 (2)
") Balti pakendi protseduur MLH kogemus Iivi Ammon, Ravimitootjate Liit Ravimiameti infopäev 13.06.2012 Eeltöö ja protseduuri algus Päev -30 MLH esindajad kolmes riigis jõuavad arusaamani Balti pakendi protseduuri
Balti pakendi protseduur MLH kogemus Iivi Ammon, Ravimitootjate Liit Ravimiameti infopäev 13.06.2012 Eeltöö ja protseduuri algus Päev -30 MLH esindajad kolmes riigis jõuavad arusaamani Balti pakendi protseduuri
SPORTident Air+
 Tarmo Klaar 2012-2013 Esimene koolitus Eestis 2012, Põlvas Ülevaade Uus riistvara Vana tarkvara Proovime kasutada, näited Põhineb hetkel teadaoleval funktsionaalsusel. Tootja ei ole veel lõplikku versiooni
Tarmo Klaar 2012-2013 Esimene koolitus Eestis 2012, Põlvas Ülevaade Uus riistvara Vana tarkvara Proovime kasutada, näited Põhineb hetkel teadaoleval funktsionaalsusel. Tootja ei ole veel lõplikku versiooni
6
 TALLINNA ÕISMÄE GÜMNAASIUMI ÕPPESUUNDADE KIRJELDUSED JA NENDE TUNNIJAOTUSPLAAN GÜMNAASIUMIS Õppesuundade kirjeldused Kool on valikkursustest kujundanud õppesuunad, võimaldades õppe kolmes õppesuunas. Gümnaasiumi
TALLINNA ÕISMÄE GÜMNAASIUMI ÕPPESUUNDADE KIRJELDUSED JA NENDE TUNNIJAOTUSPLAAN GÜMNAASIUMIS Õppesuundade kirjeldused Kool on valikkursustest kujundanud õppesuunad, võimaldades õppe kolmes õppesuunas. Gümnaasiumi
X Window System tuntud kui: X11, X, X-Windows akendussüsteem/akendesüsteem rastergraafikat toetavatele ekraanidele UNIX-maailmas väga levinud mitmesug
 X Window System tuntud kui: X11, X, X-Windows akendussüsteem/akendesüsteem rastergraafikat toetavatele ekraanidele UNIX-maailmas väga levinud mitmesugused realisatsioonid ka Windowsile erinevad realisatsioonid
X Window System tuntud kui: X11, X, X-Windows akendussüsteem/akendesüsteem rastergraafikat toetavatele ekraanidele UNIX-maailmas väga levinud mitmesugused realisatsioonid ka Windowsile erinevad realisatsioonid
Praks 1
 Biomeetria praks 6 Illustreeritud (mittetäielik) tööjuhend Eeltöö 1. Avage MS Excel is oma kursuse ankeedivastuseid sisaldav andmestik, 2. lisage uus tööleht, nimetage see ümber leheküljeks Praks6 ja 3.
Biomeetria praks 6 Illustreeritud (mittetäielik) tööjuhend Eeltöö 1. Avage MS Excel is oma kursuse ankeedivastuseid sisaldav andmestik, 2. lisage uus tööleht, nimetage see ümber leheküljeks Praks6 ja 3.
Microsoft Word - EVS-ISO doc - pdfMachine from Broadgun Software, a great PDF writer utility!
 EESTI STANDARD TOORNAFTA JA VEDELAD NAFTATOOTED HORISONTAALSETE SILINDRILISTE MAHUTITE KALIBREERIMINE Osa 2: Elektro-optiline sisemiste kauguste mõõtemeetod Petroleum and liquid petroleum products Calibration
EESTI STANDARD TOORNAFTA JA VEDELAD NAFTATOOTED HORISONTAALSETE SILINDRILISTE MAHUTITE KALIBREERIMINE Osa 2: Elektro-optiline sisemiste kauguste mõõtemeetod Petroleum and liquid petroleum products Calibration
SAF 7 demo paigaldus. 1.Eeldused SAF 7 demo vajab 32- või 64-bitist Windows 7, Window 8, Windows 10, Windows Server 2008 R2, Windows Server 2012, Wind
 SAF 7 demo paigaldus. 1.Eeldused SAF 7 demo vajab 32- või 64-bitist Windows 7, Window 8, Windows 10, Windows Server 2008 R2, Windows Server 2012, Windows Server 2012 R2, Windows Server 2016 või Windows
SAF 7 demo paigaldus. 1.Eeldused SAF 7 demo vajab 32- või 64-bitist Windows 7, Window 8, Windows 10, Windows Server 2008 R2, Windows Server 2012, Windows Server 2012 R2, Windows Server 2016 või Windows
Võrguinverterite valik ja kasutusala päikeseelektrijaamades Robert Mägi insener
 Võrguinverterite valik ja kasutusala päikeseelektrijaamades Robert Mägi insener Robert Mägi o Õpingud: Riga Technical University o Haridus: MSc (Electrical Engineering) MSc (Automatic Telecommunications)
Võrguinverterite valik ja kasutusala päikeseelektrijaamades Robert Mägi insener Robert Mägi o Õpingud: Riga Technical University o Haridus: MSc (Electrical Engineering) MSc (Automatic Telecommunications)
(Tõrked ja töökindlus \(2\))
)") Elektriseadmete tõrked ja töökindlus Click to edit Master title style 2016 sügis 2 Prof. Tõnu Lehtla VII-403, tel.6203 700 http://www.ttu.ee/energeetikateaduskond/elektrotehnika-instituut/ Kursuse sisu
Elektriseadmete tõrked ja töökindlus Click to edit Master title style 2016 sügis 2 Prof. Tõnu Lehtla VII-403, tel.6203 700 http://www.ttu.ee/energeetikateaduskond/elektrotehnika-instituut/ Kursuse sisu
G aiasoft Programmi VERP ja Omniva Arvekeskuse liidese häälestamine ja arvete saatmine-lugemine VERP 6.3 ja VERP 6.3E Versioon ja hilisemad K
 Programmi VERP ja Omniva Arvekeskuse liidese häälestamine ja arvete saatmine-lugemine VERP 6.3 ja VERP 6.3E Versioon 6.3.1.51 ja hilisemad Kasutaja juhend 2016 Sisukord 1. Sissejuhatus...3 2. Liidese häälestus...3
Programmi VERP ja Omniva Arvekeskuse liidese häälestamine ja arvete saatmine-lugemine VERP 6.3 ja VERP 6.3E Versioon 6.3.1.51 ja hilisemad Kasutaja juhend 2016 Sisukord 1. Sissejuhatus...3 2. Liidese häälestus...3
Häälestusutiliit Kasutusjuhend
 Häälestusutiliit Kasutusjuhend Autoriõigus 2007, 2008 Hewlett-Packard Development Company, L.P. Windows on Microsoft Corporationi USAs registreeritud kaubamärk. Käesolevas dokumendis sisalduvat teavet
Häälestusutiliit Kasutusjuhend Autoriõigus 2007, 2008 Hewlett-Packard Development Company, L.P. Windows on Microsoft Corporationi USAs registreeritud kaubamärk. Käesolevas dokumendis sisalduvat teavet
Uudiseid k-meride abil bakterite leidmisest [Compatibility Mode]
![Uudiseid k-meride abil bakterite leidmisest [Compatibility Mode]](/thumbs/88/116394963.jpg "Uudiseid k-meride abil bakterite leidmisest [Compatibility Mode]") Uudiseid k-meride abil bakterite leidmisest CLARK: fast and accurate classification of metagenomic and genomic sequences using discriminative k-mers(2015) Rachid Ounit, Steve Wanamaker, Timothy J. Close
Uudiseid k-meride abil bakterite leidmisest CLARK: fast and accurate classification of metagenomic and genomic sequences using discriminative k-mers(2015) Rachid Ounit, Steve Wanamaker, Timothy J. Close
C-SEERIA JA VJATKA-SEERIA LÄBIVOOLUKUIVATID
 C-SEERIA JA VJATKA-SEERIA LÄBIVOOLUKUIVATID C-SEERIA LÄBIVOOLUKUIVATID TÕHUSAKS JA ÜHTLASEKS VILJA KUIVATAMISEKS Mepu kõrgtehnoloogilised, pideva vooluga, sooja õhuga kuivatid kuivatavad vilja õrnalt,
C-SEERIA JA VJATKA-SEERIA LÄBIVOOLUKUIVATID C-SEERIA LÄBIVOOLUKUIVATID TÕHUSAKS JA ÜHTLASEKS VILJA KUIVATAMISEKS Mepu kõrgtehnoloogilised, pideva vooluga, sooja õhuga kuivatid kuivatavad vilja õrnalt,
efo03v2pkl.dvi
 Eesti koolinoorte 50. füüsikaolümpiaad 1. veebruar 2003. a. Piirkondlik voor Põhikooli ülesannete lahendused NB! Käesoleval lahendustelehel on toodud iga ülesande üks õige lahenduskäik. Kõik alternatiivsed
Eesti koolinoorte 50. füüsikaolümpiaad 1. veebruar 2003. a. Piirkondlik voor Põhikooli ülesannete lahendused NB! Käesoleval lahendustelehel on toodud iga ülesande üks õige lahenduskäik. Kõik alternatiivsed
DVD_8_Klasteranalüüs
 Kursus: Mitmemõõtmeline statistika Seminar IX: Objektide grupeerimine hierarhiline klasteranalüüs Õppejõud: Katrin Niglas PhD, dotsent informaatika instituut Objektide grupeerimine Eesmärk (ehk miks objekte
Kursus: Mitmemõõtmeline statistika Seminar IX: Objektide grupeerimine hierarhiline klasteranalüüs Õppejõud: Katrin Niglas PhD, dotsent informaatika instituut Objektide grupeerimine Eesmärk (ehk miks objekte
PowerPoint Presentation
 Eesti pensionisüsteem võrdluses teiste Euroopa riikidega: olukord, väljakutsed ja kesksed valikud Lauri Leppik 7.06.2019 Pension kui vanadusea sissetulek Pension on ühiskondliku tööjaotuse kaasanne tekkis
Eesti pensionisüsteem võrdluses teiste Euroopa riikidega: olukord, väljakutsed ja kesksed valikud Lauri Leppik 7.06.2019 Pension kui vanadusea sissetulek Pension on ühiskondliku tööjaotuse kaasanne tekkis
Praks 1
 Biomeetria praks 3 Illustreeritud (mittetäielik) tööjuhend Eeltöö 1. Avage MS Excel is oma kursuse ankeedivastuseid sisaldav andmestik, 2. lisage uus tööleht, 3. nimetage see ümber leheküljeks Praks3 ja
Biomeetria praks 3 Illustreeritud (mittetäielik) tööjuhend Eeltöö 1. Avage MS Excel is oma kursuse ankeedivastuseid sisaldav andmestik, 2. lisage uus tööleht, 3. nimetage see ümber leheküljeks Praks3 ja
 Page 1 of 5 Tehniline Allikas: Pereregistri Kasutusjuhend Sisukord 1 Töö rahvastikuregistri menetlustarkvaraga 1.1 RR menetlustarkvara töökoha riistvara ning andmesideühendus 1.2 Klienditarkvara installeerimisele
Page 1 of 5 Tehniline Allikas: Pereregistri Kasutusjuhend Sisukord 1 Töö rahvastikuregistri menetlustarkvaraga 1.1 RR menetlustarkvara töökoha riistvara ning andmesideühendus 1.2 Klienditarkvara installeerimisele
Microsoft Word - vundamentide tugevdamine.doc
 10 Vundamentide tugevdamine. 1. Vundamentide tugevdamise põhjused 2. Tugevdamisega seotud uuringud 3. Tugevdusmeetodid 3.1 Vundamendi süvendamine 3.2 Talla laiendamine 3.3 Koormuse ülekanne vaiadele 3.4
10 Vundamentide tugevdamine. 1. Vundamentide tugevdamise põhjused 2. Tugevdamisega seotud uuringud 3. Tugevdusmeetodid 3.1 Vundamendi süvendamine 3.2 Talla laiendamine 3.3 Koormuse ülekanne vaiadele 3.4
PowerPoint Presentation
 Maamaksu infosüsteem (MAKIS) Maksustamishind Talumistasud Andres Juss Maa-ameti kinnisvara hindamise osakonna juhataja 13.11.2018 MAKIS eesmärk Kõik omavalitsused kasutavad veebipõhist maamaksu infosüsteemi
Maamaksu infosüsteem (MAKIS) Maksustamishind Talumistasud Andres Juss Maa-ameti kinnisvara hindamise osakonna juhataja 13.11.2018 MAKIS eesmärk Kõik omavalitsused kasutavad veebipõhist maamaksu infosüsteemi
Microsoft PowerPoint - Niitmise_tuv_optiline_ja_radar.pptx
 Ettekanne ESTGIS aastakonverentsil 30.11.2012 Niidetud alade tuvastamine multispektraalsete ja radarsatelliidipiltide põhjal Kaupo Voormansik Sisukord 1. Eksperiment 2012 suvel multispektraalsete mõõtmiste
Ettekanne ESTGIS aastakonverentsil 30.11.2012 Niidetud alade tuvastamine multispektraalsete ja radarsatelliidipiltide põhjal Kaupo Voormansik Sisukord 1. Eksperiment 2012 suvel multispektraalsete mõõtmiste