Toomas Tamm DeltaVR Bakalaureusetöö (9 EAP)
|
|
|
- Andres Teesalu
- 3 aastad tagasi
- Vaatused:
Väljavõte
1 TARTU ÜLIKOOL Arvutiteaduse instituut Informaatika õppekava Toomas Tamm DeltaVR Bakalaureusetöö (9 EAP) Juhendaja: Raimond-Hendrik Tunnel, MSc Tartu 2021
2 DeltaVR Lühikokkuvõte: Lõputöö kirjeldab virtuaalreaalsus elamuse DeltaVR loomist ja tehtud disaini otsuseid. Lõputöös on kirjas, kuidas Tartu Ülikooli Delta hoone 3D mudel saadi Unity mängumootorisse ja kuidas 3D mudelit optimeeriti hea jõudluse jaoks. Kirjeldatakse ka erinevate rakendusse loodud virtuaalsete elamuste implementatsiooni. Viimasena sai elamuse jõudlust testitud ning viidi läbi ka kasutajatestimine. Kasutajatestimise tulemusena leiti elamuses parandust vajavaid vigu ja probleeme, mida tuleks parandada. Lisaks leiti veel ideid, mida võiks tulevikus elamusse lisada. Võtmesõnad: tarkvaraarendus, virtuaalreaalsus, digitaalne kaksik, mängudisain, arvutigraafika CERCS: P170, arvutiteadus, arvutusmeetodid, süsteemid, juhtimine (automaatjuhtimisteooria) DeltaVR Abstract: This thesis describes the creation of the virtual reality experience named DeltaVR and the design decisions behind it. It describes how the 3D model of University of Tartu Delta building was put into the Unity game engine and what optimizations were done to make it run well. The thesis contains the implementation of different virtual experiences. The final application was performance and usability tested on users to find issues and bugs with the experience and to find ideas to be improved or added in the future. Keywords: software development, virtual reality, digital twin, game design, computer graphics CERCS: P170, computer science, numerical analysis, systems, control 2
3 Sisukord 1. Sissejuhatus Virtuaalsed elamused hoonetes PaabelVR Delta Õppehoone Visualiseerimise projekt CGVR VR Demo Disain Delta keskus Elamuses liikumine Virtuaalsed käed Uksed Elamused Vibu lasketiir Breakout VR Implementatsioon Tehnoloogia Virtuaalreaalsuse toe lisamine Virtuaalreaalsuses liikumine Virtuaalsed käed Uksed Vibu Breakout Testimine Elamuse jõudlus Kasutajatestimine Kasutajatestimise tulemused Kokkuvõte Viidatud allikad Lisad
4 1. Sissejuhatus Virtuaalreaalsus (VR) on tehnoloogia, millega tekitatakse arvuti abil kasutajale taju, et ta on kuskil mujal 1. Esimesed modernsed VR prillide komplektid tulid välja aastatel Aastast 2017 aastani 2021 on ülemaailmne VR turu tulu tõusnud 0.4 miljardi dollari pealt 1.4 miljardi dollari peale 3. Prognooside kohaselt kasvab aastaks 2024 see 2.4 miljardi dollari peale 3. Veebruar 2021 oli veidi üle kahe protsendi arvutimängude digipoe Steam 4 kasutajatel VR prillide komplekt 5. Seega VR on veel uus tehnoloogia ning selle kasutajabaas on kasvamas. Lõputöö eesmärk on luua Tartu Ülikooli Delta õppe- ja teadushoonest virtuaalreaalsus elamus nimega DeltaVR. Delta hoone valmis aastal ning seal õpib ja töötab üle 3200 üliõpilast, õppejõudu ja ettevõtte arendustöötajat 7. Delta hoones tegutsevad paljud erinevad instituudid, näiteks arvutiteaduse instituut ja majandusteaduskond instituut 7. Delta hoones asub arvutigraafika ja virtuaalreaalsuse labor. Laboris saavad Tartu Ülikooli tudengid kasutada, luua arvutigraafika ja arvutimängude projekte ning lõputöid. AVGR laboris on kasutamiseks erinevaid virtuaalreaalsuse peaseadmeid, näiteks OSVR HDK 1.2, Oculus Rift CV1, Oculus Quest, HTC Vive and HTC Vive Pro. 8 Laboris kasutatakse elamuste demonstreerimiseks HTC Vive Pro peaseadet, seega peamine elamuse sihtseade on HTC Vive Pro. Kuna autoril oli kodus ainult Oculus Rift S peaseade, siis on arendamise jaoks ka sellele tugi. HTC Vive Pro ja Oculus Rift S peaseadmetel on erinevaid puldid mõlemale käele. Elamus on mõeldud nii VR kogemusega kui ka kogemuseta inimestele. Elamuse eesmärk on tõsta huvi inimestes virtuaalreaalsuse vastu. Peatükis 2 vaadatakse sarnaseid töid ja elamusi hoonetes, vaadates, mida nendes on tehtud hästi ja halvasti. Peatükis 3 ja 4 kirjutatakse elamuse disaini lahendusi ja virtuaalse hoone elamuste
5 lahendusi. Peatükis 5 viidi läbi jõudlus- ja kasutajatestimine. Kasutajatestimisel koguti tagasisidet elamuse meeldivuse kohta ning mida võiks veel täiendada. Lisa I on sõnastik. Lisa II on töö loomise ajal kasutatud masinad ja nõuded. Lisa III on pilte valmis rakendusest. Lisa IV on kasutajajuhend, kuidas rakendust käima panna ning mõned tõrkeotsingu sammud. Lisa V on kirjeldus lõputööga kaasa tulevate failidest. Rakenduse repositoorium asub aadressil 5

6 2. Virtuaalsed elamused hoonetes Sarnaste tööde analüüsimine on oluline, et vältida sama töö uuesti tegemist. Lisaks sarnased töid analüüsides on võimalik leida vigu, mida uues elamuses vältida, ning uusi ideid, mida elamusse lisada. Järgmises kolmes alapeatükis vaatleme kolme digitaalsete kaksikute projekti, mida AGVR tudengid seni teinud on. 2.1 PaabelVR PaabelVR 9 versioon kaks oli aastal 2018 Tartu Ülikooli aine Arvutigraafikas loodud projekt, mille raames tehti Paabeli õppehoones olnud AGVR labori ruumidest virtuaalreaalsuse elamus (vt Joonis 1). Projektis tehti modelleerimistarkvaraga Blender 10 labori ruumist Paabeli õppehoones digitaalne kaksik, kasutades nii käsitsi modelleeritud varianti kui ka fotogrammeetriaga tehtud mudelit. Elamusse lisati veel mööblit ja tegevusi, näiteks õhupallide puhumine, seina ja põranda kaotamine kosmose näitamiseks, projekti juhendaja Madis Vasseri 3D skaneeritud pea klaaspurki lisamine kahe erineva näoilmega ja muud sellist. Joonis 1:Pilt PaabelVR elamusest. Kuna aastal 2019 kolis AGVR labor Delta hoonesse 11, siis PaabelVR ei paku enam kasutajale sujuvat üleminekut virtuaalsesse maailma. Lisaks esines autoril PaabelVR rakendust testides
 on arenduses olnud aastast 2017 ning selle eesmärk on visualiseerida inimeste liikumist Delta keskuses kasutades")
7 jõudlusega probleeme ning projektil puudub tugi muudele virtuaalreaalsuse peaseadmetele kui HTC Vive. Kuna laboris on palju erinevaid seadmeid, võiks elamus toetada rohkem kui ühte seadet. 2.2 Delta Õppehoone Visualiseerimise projekt Delta Õppehoone Visualisatsioon 12 (DBV) on arenduses olnud aastast 2017 ning selle eesmärk on visualiseerida inimeste liikumist Delta keskuses kasutades hoones olevaid sensoreid (vt Joonis 2). Projektis on loodud hoone esimesest kahest korrusest reaalajas renderdamiseks optimeeritud mudel. Lisatud on Delta hoones kahel esimesel korrusel reaalsusele vastav mööbel (Leesment, 2020, lk 13). Lisaks on veel efekte Delta õppehoone ümbruse ja ilmastiku näitamiseks ja muud sellist (Linde, 2019, lk 21-23) (Voitenko, 2018, lk 25-33). Joonis 2: Pilt DBV projektist. DBV projektiga on DeltaVR sarnane selle poolest, et mõlemal on eesmärk jäljendada Delta õppeja teadushoonet mängumootoris Unity 13. Siiski ei ole DBV projekti 3D mudel niisama kõlbulik virtuaalreaalsuses kasutamiseks. Selles on puudu laed ja lambid, seinad on lõigatud pooleks, et parandada ülevalt alla vaatamist (Nikolajev, 2018, lk 17). Lisaks on paljudes seintes augud, mis on nähtavad virtuaalreaalsuses esimeses isikus
, mille raames tehti Delta keskusest VR demo, keskendudes peamiselt AVGR labori ruumi 2007 jäljendamisele (vt Joonis 3). Joonis 3: Pilt CGVR VR Demo elamusest.")
8 2.3 CGVR VR Demo CGVR VR Demo 14 on 2020 aasta aine arvutigraafika projekt (MTAT ), mille raames tehti Delta keskusest VR demo, keskendudes peamiselt AVGR labori ruumi 2007 jäljendamisele (vt Joonis 3). Joonis 3: Pilt CGVR VR Demo elamusest. Mängumootoris Unreal Engine 15 implementeerida VR tugi, käed ja õhupallide loomine. Demos on võimalik ringi liikuda kogu Delta keskuses. Suureks puuduseks on, et väljaspool AVGR labori 2007 ruumi puudub mööbel. Proovides jooksutada projekti enda arvuti peal (vt Lisa II: Nõuded riistvarale) oli kaadriaeg üle 11,1 ms. Seega rakendusel puudub virtuaalreaalsuses sujuva elamuse jaoks piisav jõudlus. Seega Delta hoone ja AVGR labori kohta on tehtud erinevaid digitaalseid kaksikuid ja virtuaalreaalsuse kogemusi. Siiski on puudu ajakohane virtuaalreaalsuse elamus, kus on võimalik avastada suuremat osa sisustatud Delta hoonest. Lisaks peab uuem elamus käima parema jõudlusega, kui varasemad rakendused
9 3. Disain DeltaVR elamuse loomise ajal lähtuti iterative game design protsessist, kus mängu korduvalt prototüübitakse, testitakse ja analüüsitakse nii tihti, kui võimalik. Selle tulemusena areneb projekt üle aja, ning vead leitakse varakult üles (Zimmerman, 2003). Selles peatükis kirjutatakse Delta hoone digitaalse kaksiku ja selle elamuste disainist. Alampeatükis 1 kirjutatakse, kuidas hoone virtuaalne 3D mudel saadi ja seda kohendati. Alampeatükkides kirjutatakse, kuidas elamusega saab interakteeruda. Alampeatükis 3.5 kirjutatakse hoonesse lisatud mängude kohta. 3.1 Delta keskus Delta keskuse õppehoone digitaalseks jäljendamiseks leiti kaks varianti. Esimene nendest oli arhitektuuribüroo Arhitekt11 antud IFC formaadis fail, mis sisaldab hoone mudelit, selle materjale ja jooniseid. Selle faili kasutamise plussiks on see, et ta on hästi detailne ning sisaldab kõiki Delta keskuse korruseid. Halb on fail sellepärast, et hoone ehituse jooksul paljud detailid muutusid, ning faili sisu ei ole täpne tegelikkusega. Näiteks IFC failis on Delta esimese korruse trepid punased, aga tegelikkuses on need rohelised. Lisaks on IFC fail mõeldud projekteerimistarkvaras kasutamiseks, mitte mängudes. Selle tõttu puudub populaarsemates mängumootorites selle jaoks tugi. Faili mängumootorisse saamiseks tuleks see teisendada mõnda teisse formaati. Teisendamiseks saab kasutada vabavara IfcOpenShell 16. See on võimeline faili teisendama mitmesse erinevasse enim toetavasse formaati. IFC formaadis fail teisendati FBX formaati, aga saadud failis on ligi unikaalset võrestikku ning nende renderdamisel on kaadriaeg üle 11,1 ms. Seetõttu tuleks võrestikke väga palju optimeerida. Lisaks puudub tulemil suur osa mööblist ning paljud materjalid on tegelikkusega võrreldes valed (vt Joonis 4). Selle probleemiga on tegelenud teised tudengid mitu aastat DBV projektis (Voitenko, 2018) (Nikolajev, 2018) (Linde, 2019) (Leesment, 2020), seega selle failiga edasi töötades oleks töö maht liiga suur

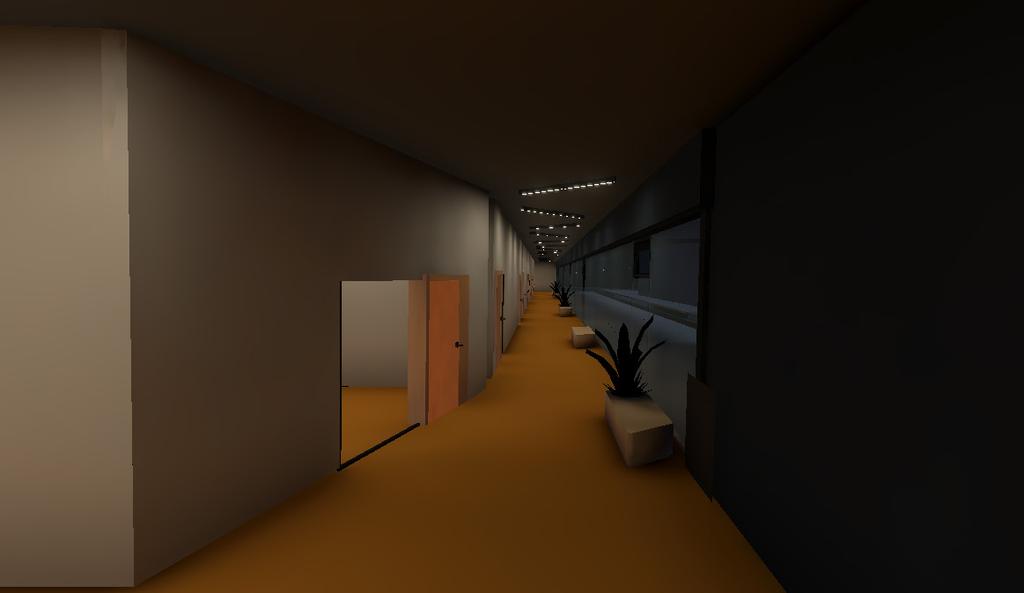
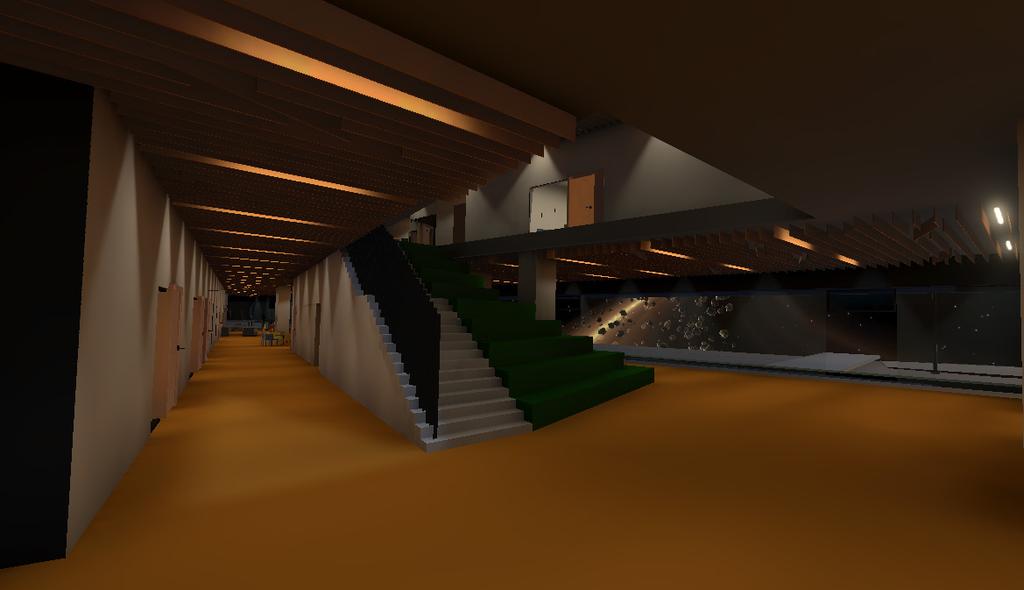
10 Joonis 4: Virtuaalse hoone välisvaade pärast IFC faili teisendamist. Teine variant oli Delta Õppehoone Visualiseerimise projekt. Kuna DBV projektis on juba suur osa hoone mudelist mängumootoris kasutamise jaoks optimeeritud ja Leesmenti leitud tulemuste põhjal on see sarnane päriseluga, siis otsustati võtta DeltaVR elamuse aluseks DBV projekti 3D mudel (Leesment, 2020, lk 29). DBV projekti autoritelt saadi alusfail, kus oli suur osa DBV visualiseerimise skripte välja võetud ja jäetud alles projektifaili hoone erinevad jupid. Alusest pidi eemaldama veel üleliigseid skripte. Peale selle oli DBV aluse virtuaalreaalsuses renderdamisel kõrgem kaadriaeg kui lubatud miinimum 11,1 ms (vt Lisa II: Nõuded riistvarale). Jasoni sõnul võib kõrge kaadriaeg põhjustada küberiiveldust (Jerald, 2015, lk ). Kaadriaeg on kõrge seetõttu, et võrreldes DBV projektiga, peab DeltaVR renderdama elamust virtuaalreaalsuse peaseadmes kahe suurema resolutsiooniga ekraani peale korraga. Lisaks on autori arvuti riistvara nõrgem kui see, mille peal DBV projekti testiti. Üks viis vähendada kaadriaega on mitte renderdada seda, mida kasutaja ei näe, näiteks seinatagune mööbel ehk varjatu praakimine (ingl occlusion culling). Kuna hoone võrestikus on hästi palju väikeseid vahesid ja auke, on raske seinatagust mööblit korrektselt välja praakida. Lisaks oli empiiriliselt näha, et augud halvendavad elamuse kaasatust. Kuna DBV projektis tehti Delta keskuse mudel programmis Blender ning modelleerimisprogrammi fail tuli projekti alusfailiga kaasa, oli paranduste tegemine lihtne. Esmalt sai lisatud teisele korrusele lagi. Seejärel kõik seinad esimesel ja teisel korrusel said pikendatud korruse laeni 10


11 või järgmise korruse põrandani. Samamoodi said täidetud mõlemal korrusel uste kohal olevad seinad. Seejärel suutis mängumootor seinatagust mööblit välja praakida ning saavutati nauditava elamuse jaoks maksimaalne kaadriaeg 11,1 ms. Joonis 5: DBV teine korrus. Joonis 6: DeltaVR teine korrus. 11
. 3.2 Elamuses liikumine Virtuaalreaalsuse (VR) elamustes on oluline hoiduda tekitamast kasutajale küberiiveldust, et tagada nauditav katkestusteta kogemus.")
12 Joonis 5 ja Joonis 6 vahel on näha, et on tõstetud kõik seinad kõrgemaks ning lisatud tagasi Delta hoonele omased laes olevad ribid. Kuna 3D mudelil puudub kaugem ümbrus, sai taustaks valitud Unity poest 17 leitud kosmose taust (vt Lisa III: Pildid rakendusest). 3.2 Elamuses liikumine Virtuaalreaalsuse (VR) elamustes on oluline hoiduda tekitamast kasutajale küberiiveldust, et tagada nauditav katkestusteta kogemus. VR elamustes on kasutusel erinevad liikumisviisid ja nendel on erinevad mõjud kasutaja kogemusele (Jerald, 2015, lk 163). Mayor jt. analüüsisid nelja erinevat liikumisviisi: huvipunktitesse liikumine, puldiga juhtimine, tehishüppeid ja ruumiulatuses liikumine. Nende järgi saavutasid kõige väiksema iivelduse ruumiulatuses liikumine ja tehishüppamine, kuigi viimane on vähem intuitiivsem liikumisviis. Selle järel tulid puldiga juhtimine ja huvipunktidesse liikumine. Mayor jt. mainivad lisaks, et ruumiulatuses navigeerimine ja tehishüppamine sobivad hästi kokku. Nende arvates on ruumiulatuses navigeerimine kõige parem liikumisviis nii elamuse saamise kui ka iivelduse vältimise poolest (Mayor, Raya, & Sanchez, 2019). Clifton jt. said sarnased tulemused. Nad lisasid, et kuigi puldiga juhtimine tekitab rohkem iiveldust, olid kasutajad rohkem mängu süvenenud võrreldes tehishüppamisega. Samuti on inimesed vähem süvenenud elamusse istudes kui seistes. Cliftoni jt. arvates on siiski raske leida universaalset VR liikumisviisi, mis sobiks kõikidele inimestele nii elamuse kui ka iivelduse poolest (Clifton & Palmisano, 2019). DeltaVR elamus on mõeldud peamiselt virtuaalreaalsuse uutele katsetajatele, seetõttu eelnevast võib järeldada, et parim ja kõige universaalsem kombinatsioon on ruumiulatuses liikumine koos tehishüppamisega. Tehishüppamise jaoks peab olema kasutajal võimalus sihtkohta valida. Selle jaoks sai loodud puuteplaati ülaosa vajutades või juhtkangi üles lükkamisel välja tulev joon koos sihtmärgiga (vt Joonis 7). Joonis 7: Tehishüppe sihtmärk
13 Veel tuleb lisada eraldi elamuses pööramise viis. Mõlemat lõppseadet on võimalik ühendada arvutiga kaabliga, ning liiga palju füüsiliselt pöörates võib kaabel kasutaja jalgade külge kinni jääda. Kuna esimesest lõigust võib järeldada, et kasutaja sujuv liigutamine võib tekitada iiveldust, siis elamusse sai valitud kohene 45-kraadine pööre vasakule või paremale, vastavalt puldi juhtnupu keeramisel või puuteplaadi vajutamisel. 3.3 Virtuaalsed käed Virtuaalreaalsuse elamuste üks suur oluline osa on kasutaja interaktsioon keskkonnaga. Jerald leidis, et virtuaalsed käed on kõige parim variant loomuliku interaktsiooni jaoks. Ta loetles kolme erinevat viisi, kuidas käsi lisada: 1) realistlik variant koos käte ja käsivartega 2) osati realistlik variant ainult kätega 3) abstraktsed käed, kus kätt saab liigutada väljapoole isiklikku ruumi. Nende hulgast ta ütleb, et osati realistlikke kätega saab kasutaja kõige kergemini ümbrust mõjutada (Jerald, 2015, lk ). Seega DeltaVR elamusse on kõige sobivam lisada osati realistlikud käed. Lisaks on selle realiseerimine variantide hulgast kõige lihtsam. Kaasatuse suurendamiseks lisati ka kätele erinevad animatsioonid vastavalt sellele, kuidas kasutaja oma käsi nuppudel hoiab (vt Joonis 8). Nendeks sai valitud avatud käsi, rusikas ja näpistamine ehk ok-positsioon. Kuna elamus peab toetama kahte erinevat pulti, peavad mõlema puldi nupud panema käe õigesse positsiooni. Kuna nupud asuvad kontrolleritel piisavalt samades kohtades, võib need panna sama nupu külge (vt Joonis 9). Kui puldil ei ole nuppe alla vajutatud, on käsi avatud positsioonis. Kui puldil on alla vajutatud trigger nupp, siis läheb käsi näpistamise positsiooni. Kui puldil on alla vajutatud grip nupp, on käsi rusika positsioonis. 13
 ja Oculus Touch (paremal) pultide nupud.")

14 Joonis 8: Erinevad käe positsioonid DeltaVR elamuses. Joonis 9: Vive Wand (vasakul) ja Oculus Touch (paremal) pultide nupud. 18 Algselt sai tehtud nii, et kui kasutaja vajutab grip nuppu ning käsi läheb rusikasse, siis võtab virtuaalne käsi objektist kinni ning hoiab seda. Kuna Vive Wand kontrolleril on autori testimisel väga ebamugav grip nuppu all hoida, siis sai muudetud nii, et kasutaja saab ka asju üles võtta kasutades trigger nuppu

15 3.4 Uksed Delta hoones erinevate ruumide liikumisel tuleb läbi liikuda ustest. Selle jaoks on kaks erinevat lahendust. Esimene on kasutaja teisele poole tehishüppamine, mis on kasutuses näiteks sarnases töös CGVR VR Demo. Teine variant on kasutajal ise uks lahti teha ja läbi kõndida. Elamusse sai valitud teine variant, sest see suurendab elamuse kaasatust. Joonis 10: 1) Päris uks 2) DBV uks 3) DeltaVR uks. Lisaks ei klapi DBV baasiga kaasa tulnud uksed päriseluga. Seega algul tuli neid parandada, muutes külgseinte paksusi ning lisades paremad materjalid (vt Joonis 10). Kui võtta kinni ukse lingist, on võimalik ust kinni ja lahti tõmmata. Seejärel tuli leida hoonest vanad uksed ning need uuema versiooniga välja vahetada. 3.5 Mängud Mängud on väiksemad iseseisvad kogemused Delta hoones. Nende eesmärk on pakkuda kasutajale muud tegevust peale hoones ringi liikumise. Lisaks näitavad nad, et virtuaalreaalsuses on võimalik teha tegevusi, mida päriselus on keeruline saavutada. Kuna DeltaVR on ka mõeldud uutele VR kasutajatele, peavad elamused olema mugavuselt lihtsad. 15

. Joonis 11: Pilt vibu lasketiiru elamusest.")
16 3.5.1 Vibu lasketiir Esimene mäng on vibu lasketiir, mis sai loodud teise korruse rõdule. Rõdule on asetatud vibu ning lõpmatu kogus nooli. Hoides vibu ühes käes ning pannes noole vibule, saab vibu tagasi tõmmata. Lahti lastes lendab nool välja. Lasketiirus sihtmärkide tekitamiseks peab mängija laskma paigal seisvat Start sihtmärki. See tähendab, et liikuvad sihtmärgid tekivad alles siis, kui kasutaja on õppinud vibu kasutama. Kui kasutaja on Start sihtmärgile pihta saanud, algatab lasketiir üheminutilise taimeri ning hakkab liikuvaid sihtmärke kaugusesse tekitama (vt Joonis 11). Joonis 11: Pilt vibu lasketiiru elamusest. Lasketiiru liikuvateks sihtmärkideks on Delta hoonele lähenevad UFO-d (vt Joonis 12), mis valivad suvalise punkti rõdu juures ning liiguvad sinnapoole. Sihtmärkidele pihta laskmine lisab mängijale punkte sõltuvalt sihtmärgi kaugusest. Kui taimer saab täis, näidatakse kasutajale tema skoori, kõige kõrgemat skoori ning tekib tagasi Start sihtmärk. Joonis 12: UFO. 16

. Eesmärk on lõhkuda mängijale lähenevaid kaste. Kui kastid liiga lähedale jõuavad, on mäng läbi.")
17 3.5.2 Breakout VR Breakout on klassikaline 2D mäng, kus kasutaja peab labaga palle vastu kaste põrgatama (vt Joonis 13) (Mike, 2016). Breakout VR on inspireeritud kloon sellest mängust, mis kasutab sarnaseid mehaanikaid. Võrreldes 2D variandiga, on kolme põrgatava seina asemel viis, ühe laba asemel on kaks laba, ning kastid on 3D ruumis. Mängus saab kasutaja hoida mõlemas käes ühe laba, millega palli lüüa (vt Joonis 14). Eesmärk on lõhkuda mängijale lähenevaid kaste. Kui kastid liiga lähedale jõuavad, on mäng läbi. Kui pall läheb mängijast mööda vastu tagumist seina, siis saab mäng samuti läbi. Joonis 13: Pilt "Breakout" mängust Joonis 14: Breakout VR mäng Kaste on kahte tüüpi. Esimene kasti tüüp on tavaline punane kast, mille hävitamisel kaob ta niisama ära. Teine kasti tüüp on roheline kast, mis hävitamisel tekitab ühe palli juurde. Rohkemate pallidega saab kiiremini kaste hävitada, aga peab rohkem palle jälgima. Rohelise kasti tekkimise tõenäosus on 5%. 17
18 Kastid tekivad lainetes ning igas laines on 9 kasti. Uus laine tekib iga viie sekundi tagant. Kastid liiguvad mängija poole 0,15 meetrit sekundis. Uute lainete tekkimise ja kastide liikumise kiiruse vahe tõttu on lained üksteisega tihedalt koos. Mida lähemal on lained kasutajale, seda kiiremini saab kasutaja põrgatada palli vastu kaste, ning seda kiiremini lained hävinevad. 18
19 4. Implementatsioon Implementatsiooni peatükis on täpsemalt kirjas, milliseid tehnoloogiaid kasutati elamuse loomiseks ning kuidas erinevaid lahendusi implementeeriti. Kuigi implementeerida tuli palju asju, siis siin peatükis on kirjeldatud ainult huvitavamad ja keerulisemad asjad. Lisaks sai palju korrastatud hoone mudelit, et valguse küpsemine tuleks hea välja (vt Lisa III: Pildid rakendusest). Alampeatükis 4.1 on kirjas, milliseid tehnoloogiaid kasutati DeltaVR loomisel ja miks. Alampeatükis 4.2 on kirjas, kuidas lisati mängumootorile VR tugi. Alampeatükis 4.3 on kirjas, kuidas implementeeriti elamuses liikumine. Alampeatükis 4.4 on kirjas, kuidas animeeriti virtuaalsed käed. Alampeatükis 4.5 on kirjas, kuidas implementeeriti virtuaalsed uksed. Alampeatükis 4.5 ja 4.6 on kirjas, kuidas implementeeriti vibu ja breakout mängud. 4.1 Tehnoloogia Arvutimängude loomiseks on võimalik valida erinevaid mängumootoreid. DeltaVR elamuse jaoks tuli valida mängumootor, millel on VR tugi. VR toega mängumootorid on näiteks Unity, Unreal Engine ja Godot 19. Nende hulgast sai valitud Unity, sest autoril on varasem kogemus tarkvaraga, tarkvara on tasuta, ning peatükis 3.1 oli DBV projekti autoritelt juba saadud Unity mängumootoris Delta hoone alusfail. Lisaks on Unity populaarne mängumootor, seega probleemide esinemisel leidub internetist abi. Kuna DBV Delta hoone mudelil oli puudujääke, oli vajadus seda redigeerida. Hoone mudeli muutmiseks sai valitud 3D-graafika rakendus Blender, kuna see toetab DBV alusfaili formaati ning on vabavara. 4.2 Virtuaalreaalsuse toe lisamine Unity mängumootoris on saadaval palju erinevaid virtuaalreaalsuse toe pakette, näiteks Unity XR Interaction Toolkit 20, Oculus Integration 21 ja SteamVR 22. Kuna elamus peab toetama erinevaid virtuaalreaalsuse peaseadmeid, siis selleks sobivad paketid on XR Interaction Toolkit ja SteamVR
20 Oculuse seadmetele lisab SteamVR pakett kaadriaega ning ei tööta korralikult Oculuse pakutud silumistööriistadega. Oculuse silumistööriistadega saab Oculuse seadmetel näiteks kaadriaegu mõõta ning asynchronous spacewarp meetodit kinni lülitada 23. Seega DeltaVR elamusele sai valitud Unity XR Interaction Toolkit pakett. Lisaks toetab valitud pakett uuemat OpenXR 24 standardit, mis teeb erinevate seadmete toe lisamise kergemaks. Peale paketi allalaadimist ja projekti lisamist tuleb Unity stseeni lisada paketiga tulnud XR Rig komponent, mis sisaldab oma struktuuris nii pea kui ka käte komponente. Peale seda oli olemas tugi virtuaalreaalsuses ringi vaatamisele ning pea liigutamisele. 4.3 Virtuaalreaalsuses liikumine Peatükkis 3.2 sai otsustatud, et DeltaVR elamuse liikumisviisid on ruumiulatuses liikumine ja tehishüppamine. Ruumiulatuses liikumise tugi on juba olemas tänu eelnevas alapeatükkis 4.2 XR Rig mängukompondendi lisamisele. Tehishüppe tugi tuleb eraldi lisada. Tehishüppe jaoks pidi määrama pinnad, kuhu on võimalik hüpata. Kuna hoone tuli ühe suure võrestikuna, tuli põrandad Blenderis eraldada. Kuna põrandatel on erinev materjal kui seinadel, siis sai kasutada Blenderis Split by Material valikut, mis eraldab ühe võrestiku mitmeks erinevaks väiksemaks võrestikuks, kus igal uuel võrestikul on ainult üks materjal. Seejärel tuli lisada uutele põranda võrgustikele Teleport Area komponent. Kui komponent saab valiku käsu, siis ta liigutab XR Rig objekti valiku asukohta. Paremale käele sai lisatud XR Ray Interactor komponent ning seejärel oli võimalik parema käe teleport nupuga kiirt välja lasta. Lisaks peab igale Teleport Area komponendile määrama sihtmärgi kokkupakitud objekti (ingl prefab), mis on Unity mootoris erinevate objektide ja nende komponentide korduvkasutatav kogum. Kokkupakitud objekt tekib sihitud kohta, kus eelnevalt lisatud kiir ja Teleport Area komponendiga võrestik lõikuvad (vt peatükk 3.2). Seejärel kui kasutaja laseb teleport nupust lahti ning on olemas lõikumispunkt, liigutatakse kasutaja lõikumispunktile

21 4.4 Virtuaalsed käed Kasutaja käte positsiooni jälgib esimeses alapeatükkis lisatud XR Rig komponent. Aga kuna enamustel VR peaseadmetel on käte jaoks mõeldud puldid, ei ole võimalik täpset näppude positsiooni kätte saada. Siiski on võimalik teha eeldus kasutaja näppude positsiooni kohta kasutades infot puldi nuppudest. Esiteks tuli leida sobiv käte mudel ja animatsioonid. Kuna XR Interaction Toolkit neid lõputöö tegemise ajal ei sisaldanud, siis sai need võetud Oculus Integration paketist, sest autoril on varasem kogemus selle paketiga. Nagu peatükis 3.3 kirjeldatud, sai kätega kaasa kolm animatsiooni: avatud käsi, rusikas ja näpistamine. Käte mudelitest sai loodud kokkupakitud objekt. Teine samm oli animatsioonide vahetamine. Selle jaoks on mängumootoris Unity olemas Animator Controller 25 komponent. Tuli luua mõlema käe kokkupakitud objektile eraldi Animator Controller ning lisada neile parameetrid Grip ja Trigger, millele saab hiljem anda puldi nuppude sisendid. Pärast tuli lisada Animator Controller komponendile Blend Tree 26, millega saab erinevaid animatsioone kokku sulandada (vt Joonis 15). Blend Tree komponendis saab määrata X ja Y sisendit ning nendeks määrati Joonis 15: Blend Tree Unity inspectoris. eelnevalt tehtud parameetrid Grip ja Trigger. Blend Tree komponenti lisati veel kolm eelnevalt nimetatud animatsiooni. Pärast nende lisamist saab määrata, kuidas neid kokku sulandada. Sai tehtud nii, et kui Grip ja Trigger ei ole alla vajutatud, siis on käsi avatud. Kui on Trigger alla vajutatud, on käsi näpistamise positsioonis. Kui on kas Grip või nii Grip kui ka Trigger alla vajutatud, siis on käsi rusika positsioonis

22 Kolmandana tuli saata puldi nuppude info Animator Controller komponendile. Selle jaoks tuli luua uus skript mõlemale käele. Skripti sees tuli leida käe Animator Controller komponent, leida sisendseadmete hulgast parem ja vasak käsi ning saata mõlema käe Grip ja Trigger nuppu staatus Animator Controller komponendi Grip ja Trigger parameetritele. Viimasena tuli lisada XR Rig komponendile mõlema käe kokkupakitud objekt ning pärast seda olid olemas virtuaalsed käed, mis reageerisid kasutaja näppude positsioonile puldil. 4.5 Uksed DeltaVR elamuses said uksed tehtud kolmest osast: uks ise, ukselink ja hingega ühendatud ukseliist (vt Joonis 16). Uks ja ukseliist ühendati komponendiga Hinge Joint (vt Joonis 16). Komponendis tuli määrata ühendatud kehaks (ingl connected body) ukseliist. Lisaks tuli määrata ukse pööramispiirid (ingl limits), milleks said -90 kuni 90 kraadi ning pöörlemistelg paralleelseks maaga. Seejärel oli olemas mängumootori füüsikat kasutav uks. Joonis 16: Unity mootoris ukse inspect vaade (vasak) ja ukse osad (parem). Et kasutaja saaks ust tõmmata ja lükata, tuli lisada uksele XR Grab Interactable komponent. Kuna kasutaja peab saama ust ukselingist tõmmata, tuli üle kirjutada komponendi collider ukselingi omaga. Lisaks tuli määrata, et komponent võtaks käe positsiooni asemel käe kiiruse. 22
23 Selle tagajärjel saab ust hooga kinni ja lahti tõmmata, sest ukse liigutamisel antakse ukselingi positsioonile punktkiirust, ning mängumootor arvutab ukse liikumist ümber hinge. Kuna võetakse ainult kiirus, ei ole võimalik uksel hingede küljest lahti tulla, sõltumata käe positsioonist. 4.6 Vibu Vibu lasketiir sisaldab kolme tähtsat objekti: vibu, nooled ja sihtmärgid. Nooli saab kasutaja üles võtta nooletupest. Nooletupp on nii mängukomponent kui ka skript, mis laiendab XRSocketInteractor skripti. XRSocketInteractor skript käitub nagu pesa ning hoiab enda sees kuni ühte mänguobjekti. Kasutaja saab sinna mänguobjekte panna või ära võtta. Seega sobib see hästi noole hoidmiseks. Nooletupe loomisel tekitab tema skript mänguobjekti koordinaatidele uue noole ning antakse käsk XRSocketInteractor skriptile see üles korjata (vt Joonis 17). Kui kasutaja korjab hoitud noole üles, siis loob skript uue noole ning annab uuesti käsu XRSocketInteractor skriptile see üles korjata. Niiviisi on võimalik kasutajal üles korjata lõpmatu hulk nooli. Vibu mänguobjekt koosneb kolmest erinevast skriptist ja nende mängukomponendidest: notch, quiver ja puller. Puller skript asub vibunööri keskpunktis ning selle eesmärk on lasta kasutajal tõmmata vibunööri ja jälgida tõmbe kaugust. Skriptis on määratud alg ja lõpp positsioon. Algpositsioon määrab vibunööri nullpositsiooni ning lõpp määrab kõige suurema kauguse, kuhu on võimalik vibunööri tõmmata. Kui kasutaja võtab kinni puller mänguobjektist, siis sõltuvalt käe positsioonist animeerib skript vibunööri, arvutades tõmbamise tugevuse, kasutades alg ja lõpp positsiooni. Lahti lastes muudab ta selle väärtuse nulliks. Notch mängukomponent asub samuti vibunööri keskpunktis ning selle eesmärk on hoida vibus noolt ning seda lasta. Selle jaoks laiendab notch XRSocketInteractor skripti. Notch skript kuulab puller skriptilt lahti laskmisi. Kui kasutaja laseb puller komponendi lahti, siis annab notch skript käsu noolele edasi lennata, koos puller skriptilt saadud tõmbamise tugevusega. 23

24 Joonis 17: Vibu laskmise loogika diagramm. Vibu mängukomponent laiendab XRGrabInteractable komponenti, ning laseb kasutajal seda kätte võtta. Ta sisaldab ka Animator komponenti, mis animeerib vibunööri tõmbamist puller skriptist saadud tõmbamise tugevusega. Noole mängukomponent laiendab XRGrabInteractable komponenti, mis laseb samuti kasutajal seda käes hoida. Lisaks on võimalik asetada noolt XRSocketInteractor 24
25 komponentidesse. Kui nool saab notch skriptilt käsu edasi lennata, arvutab ta saadud tugevusega enda uue kiiruse ning liigub edasi, kuni tabab sihtmärki või muud seina. Skript pöörab ka noole tippu liikumissuunda, et jäljendada realistliku noole lendamist. Unity mängumootori füüsikas võivad väikesed kiiresti liikuvad objektid seinadest läbi lennata, kuna objekt liigub kahe füüsika sammu vahel objektist läbi. See juhtus isegi siis, kui määrata continuous (pidev) kokkupõrke tuvastuse režiim. Seetõttu kontrollib noole skript veel lisaks iga füüsika tiksu vahel, kas jäi mingi objekt eelmise positsiooni ja uue positsiooni vahele. Kui jäi, siis paneb skript noole seisma. Sedaviisi ei saa nool peenikestest tahketest asjadest läbi lennata. 4.7 Breakout Breakout sisaldab nelja tähtsat mänguobjekti. Nendeks on laba, pall, kast ja sein. Laba koosneb käepidemest ja suuremast tahust, millega palli lüüa. Käepidemel on XRGrabInteractable laiendatud skript, mis lubab kasutajal labast kinni võtta. XRGrabInteractable on määratud jälgima käte kiirust positsiooni asemel, et anda palli lüües edasi laba kiirus. Kuna XR Interaction Toolkit pre.1 versioonis oli kiiruse jälgimisega käes hoides laba liikumine ebasujuv, tehti laiendatud skript. Laiendatud skript määrab laba kätte võttes laba vanemaks XR Rig komponendi. Sel juhul liigutab mängumootor ise laba inimese keha liikumisega kaasa ning labade liikumine on sujuv. Teine oluline mänguobjekt on kast. Kastid tekivad 9-s määratud algpunktis ning iga kaader liiguvad lõppseina suunas. Kui kast läheb punasele jõuväljale (mängija ees olev läbipaistev sein) pihta, siis saadab jõuväli mängule käsu mäng lõpetada (vt Joonis 18). Kui kast puudutab palli, siis ta hävitab ennast ära. Kui kast on roheline kast, siis ta tekitab uue palli ning annab talle suvalise suuna. Lisaks annab ta mängu peaskriptile teada, et nüüd on üks pall rohkem mängus. Enne ära hävimist mängivad kastid ära hävitamise visuaalset efekti. Kolmas oluline mänguobjekt on pall. Pall hoiab enda kiirust piirides, et vältida liiga kiiret või aeglast palli liikumist. Kui pall läheb mängija taha seina pihta, hävitab ta ennast ning annab mängule teada, et mängus on üks pall vähem (vt Joonis 18). Kui pallide arv on 0, siis mäng saab läbi. 25

26 Joonis 18: Breakout elamuse mängu erinevate osade käik. Implementatsiooni osade kohta on veel kirjeldamata osi, näiteks vibu sihtmärkide liikumine, skoori lugemine, palli seinade peal põrkamine jms. Kuna need on lihtsad osad 26
27 implementatsioonist, ei ole nende töötamist siin kirjeldatud. Edasi tuleb veel testida, kas elamusse implementeeritud mängud on kasutajatele nauditavad ning mida oleks vaja nende puhul parandada. 27

28 5. Testimine Testimine on tarkvaraarenduse oluline osa. See aitab määrata, kas töö loomise ajal tehtud otsused on head või halvad ning mida saaks parandada. Alampeatükis 5.1 analüüsiti elamuse jõudlust. Alampeatükis 5.2 kirjeldatakse DeltaVR elamuse kasutajatestimist eelneva virtuaalreaalsuse kogemusega kasutajate peal ning alampeatükis 5.3 analüüsiti testimise tulemusi. 5.1 Elamuse jõudlus Jasoni sõnul on üks suurim küberiivelduse tekitaja kõrge latentsus. Ta lisab, et kõrge latentsus põhjustab veel kasutaja halvenenud visuaalset täpsust ja pause virtuaalreaalsuse kohalolekus (Jerald, 2015, lk ). Elamuse tekitatud latentsust saab mõõta läbi kaadriaja. Ideaalis saavutab elamus sellise maksimaalse kaadriaja, mis vastab HMD ekraani sagedusele. Kuna DeltaVR elamus on peamiselt mõeldud AVGR laboris oleva HTC Vive Pro seadme peal kasutamiseks, on see kaadriaeg 11,1 ms (vt Lisa 2B). Joonis 19: Kaadriaja graafik DeltaVR kasutajatestimisel. Joonis 19 näitab kaadriaega DeltaVR kasutajatestimise ajal. Testimise ajal kõndis kasutaja virtuaalses elamuses ringi, läbides enamuse hoonest ja selle ümbrusest, ning proovis läbi kõik mängud. Kuigi kaadriaeg on reaalaja rakenduse jaoks suure variatsiooniga, jääb enamus kaadriaegadest alla maksimaalse kaadriaja. Seega elamus suudab luua rohkem kaadreid, kui 28
29 peaseade suudab näidata. Kuna VR pealseadmel on üle 99% kordadel järgmine kaader olemas, siis kasutaja variatsiooni ei märka. Joonisel 19 on ka kirjas keskmine kaadriaeg ja 0.9-kvantiil ja 0.99-kvantiil kvantiil tähendab seda, et 99% kordadest oli suurim kaadriaeg 8,94 ms. Seega üle 99% kaadriaegadest on alla maksimaalse kaadriaja (vt Lisa II: Nõuded riistvarale). Seega MF1 on täidetud ning elamuse jõudlus on sobiv. 5.2 Kasutajatestimine Eraldi kasutajatestimine on oluline, et aru saada, kuidas kasutajad tegelikult tarkvara kasutavad. Lisaks võivad nad leida vigu ja anda ideid, mille peale arendaja ise ei tule. Schnelli sõnul piisab, kui teha kasutajatestimist kolme kuni viie inimesega (Nielsen, 2000). Seega kasutajatestimiseks leiti kolm inimest. Inimeste otsimisel eelistati neid, kellel on varem kogemus virtuaalreaalsusega. Varasema kogemusega inimesed peaksid hindama elamust objektiivsemalt, sest nad on rohkem teadlikud, milline on hea virtuaalreaalsus elamus. Testimist viidi läbi Tartu Ülikooli Delta hoones AVGR Laboris ruum 2007 (vt Joonis 20). Testijad kasutasid mängimiseks HTC Vive Pro peaseadet (vt Lisa II, Joonis 21), mis oli ka peamiseks sihtseadmeks elamusele. 29


30 Joonis 20: AVGR Labor Ruum 2007, testimise läbiviimise asukoht. Joonis 21: HTC Vive Pro virtuaalne peaseade. 30
31 Testijatele selgitati enne testi algust, kuidas elamuses liikuda ning mida puldil nupud teevad. Pärast selgitust lubati kasutajatel oma valikul elamuses ringi liikuda. Kohustuslik osa oli läbida mõlemad suurimad elamused hoones (vt peatükk 3.5). Kui testijad lõpuks ise elamuseni ei jõudnud, juhatati nad elamuse juurde. Testi lõpus anti testijatele küsitlus täita. Küsitluses küsiti kasutaja eelneva VR kogemuse kohta ning arvamust elamuste kohta. Küsimused olid nii vabavormis kui ka hinnang 1-5 palli süsteemis. 5.3 Kasutajatestimise tulemused Peatükis 3.2 ja 3.3 kirjutati elamuses liikumise kohta. Testijatelt sai küsitud, kuidas nad liikumist hindaksid ning mis neile selle puhul meeldis või ei meeldinud (vt Joonis 23). Kõik vastajad hindasid elamuses liikumist keskmise hindega 4,0 viiest ja leidsid, et elamuses liikumisega on probleeme. Probleemidena toodi välja, et oli võimalik läbi seina kõndida ning selle tõttu esines hoones ka kohti, kuhu oli võimalik kinni jääda. Lisati, et tehishüppamine võiks toimida ka siis, kui ei ole sõrme täiesti puuteplaadilt lahti lasknud. 3 Kuidas meeldis elamuses liikumine? Vastajaid Hinnang Joonis 22: Elamuses liikumise meeldivus. Peatükis ja 4.6 kirjutati elamuse Breakout loomisest. Testijatelt sai küsitud, kuidas nad Breakout VR elamust hindaksid ning mis neile selle puhul meeldis või ei meeldinud (vt Joonis 24). Kõik vastajad hindasid Breakout mängu keskmise hindega 4,0 viiest ja leidsid, et seda on veel 31
32 võimalik täiendada. Probleemidena toodi välja, et vahel oli raske ennustada palli liikumist ning võiks olla rohkem tagasisidet mängides, näiteks pultide vibreerimine ja rohkem heliefekte. Lisaks ei olnud kohe ilmne, et on võimalik läbi jõuvälja mänguväljale tehishüpata. Kuidas meeldis Breakout? 3 3 Vastajaid Hinnang Joonis 23: Breakout mängu meeldivus. Peatükis ja 4.5 kirjutati elamuse vibu lasketiiru loomisest. Testijatelt sai küsitud, kuidas neile vibu lasketiir meeldib ning mis neile selle puhul meeldis või ei meeldinud (vt Joonis 25). Kõik vastajad hindasid vibu lasketiiru mängu keskmise hindega 4.6(6) viiest ja leidsid, et seda on veel võimalik täiendada. Vahel oli raske noole trajektoori aimata. Lisaks taheti lasta ka muid asju, kui UFOsid, näiteks robootika ruumis liikuvat robotit. Ühel kasutajal oli päriselus kogemust vibu laskmisega, ning ta soovis sihtida vibu kahe käega. Mängu testimisel tuli välja ka viga, kus sai panna muid objekte peale noolte vibusse, näiteks Breakout mängu labasid. 32
33 Kuidas meeldis Vibu lasketiir? 3 Vastajaid Hinnang Joonis 24: Vibu lasketiiru meeldivus. Peatükis 3 kirjutati Delta hoone digitaalse kaksiku loomisest. Testijatelt sai küsitud, kuidas nad hoonet hindaksid ning mis neile selle puhul meeldis või ei meeldinud (vt Joonis 26). Kõik vastajad hindasid hoonet keskmise hindega 4.3(3) viiest ja leidsid, et seda on veel võimalik täiendada. Testijatele ei meeldinud mõnes hoone kohas esinevad graafilised vead ning üldiselt sooviksid näha rohkem korruseid. Kasutajatele meeldis öine keskkond. 3 Kuidas meeldis hoone? Vastajaid Hinnang Joonis 25: Hoone meeldivus. 33
34 Testijatelt sai veel küsitud, kuidas neile elamus tervikuna ning mis neile selle puhul meeldis või ei meeldinud (vt Joonis 27). Kõik vastajad hindasid tervet elamust keskmise hindega 4.6(6) viiest ja leidsid, et elamus neil meeldis. Testijatele meeldis hoones ringi liikuda ja asjadega interakteeruda. Hoone ja keskkonna välimus oli parem kui algselt oodatu. Veel meeldis neile leida erinevusi hoone ja digitaalse kaksiku vahel. 4 Kuidas meeldis terve elamus? Inimesed Hinnang 1 Joonis 26: Terve elamuse meeldivus. Viimasena sai küsitud testijatelt, kui tõenäoliselt nad soovitaksid elamust teistele (vt Joonis 28). Kõik vastajad hindasid 5,0. Hinnang anti peamiselt selle tõttu, et nad üldiselt nautisid elamust. 34
35 Kui tõenäoliselt soovitaksid elamust teistele? 3 3 Vastajaid Hinnang Joonis 27: Elamuse soovitamine. DeltaVR elamus vajab täiendusi vaatamata üldisele positiivsele meeldivusele. Kõige suurem probleem oli liikumisega. Liikumine on ka oluline aspekt hoone uurimisel, seega see võib ka muid hinnanguid negatiivselt mõjutada. Lisaks tuleks edasi viimistleda elamusi ning Delta hoone mudelit. Mudelil on vaja vähendada visuaalseid vigu ning lisada ka ülejäänud korrused. 35
36 Kokkuvõte Bakalaurusetöö tulemusena valmis virtuaalreaalsuse elamus DeltaVR. Algul analüüsiti 3 olemasolevat digitaalset kaksikut (PaabelVR, DBV Projekt, CGVR VR Demo) ning leiti, et pole mõistlikku Delta õppehoone ülest VR rakendust, mida AVGR laboris näidata. Töös sai analüüsitud erinevaid varinate, kuidas saada Delta hoonest mängumootoris kasutatav 3D mudel (originaalne IFC fail, DBV projekti 3D mudel) ning valiti nende hulgast DBV projekti 3D mudel, mis sisaldas Delta õppe- ja teadushoone 1. ja 2. korrust ning selle ümbrust. 3D mudel ei kõblanud kohe virtuaalreaalsuse elamuse jaoks kasutamiseks, sest kaadriaeg oli üle maksimaalse kaadriaja. Seega mudelis sai lisatud kõrgemad seinad ning Unity mängumootoris konfigureeriti varjatu praakimine. Pärast seda oli kaadriaeg alla maksimaalse lubatud kaadriaja. Mudelit sai veel täiendatud, lisades puuduvad asjad; laed ja hoonele omased ribid. Mudelit sai veel optimeeritud, jagades hoone mudeli võrestiku väiksemateks võrestikeks. Mudelis sai parandatud paljusid kohti, kus valguse küpsetamine ei töötanud korralikult ning sai eemaldatud palju graafilisi vigu. Unity mängumootorisse VR toe lisamiseks analüüsiti erinevaid variante (SteamVR, Oculus Integration, XR Interaction Toolkit) ning nende hulgast valiti XR Interaction Toolkit. XR Interaction Toolkit võrreldes teiste Unity pakettidega, pakkus tuge ka erinevatele VR raamistikele (Oculus, SteamVR). Implementatsiooni käigus lisati tugi elamuses ruumiulatuses liikumiseks ja tehishüppamiseks. Tugi lisati veel virtuaalsetele kätele ning lisati käe animatsioone (neutraalne, rusikas, ok-positsioon). Implementeeriti virtuaalsed uksed, mida saab käega kinni võttes kinni ja lahti tõmmata ja lükata. Elamusse sai veel lisatud mänge, mis olid vibu lasketiir ja Breakout VR. Elamuse peal tehti nii jõudlustestimist kui ka kasutajatestimist. Jõudlustestimise tulemusena leiti, et elamus on alla lubatud maksimaalse kaadriaja ning inimestel ei tohiks tekkida jõudluse puudumise tõttu küberiiveldust. Kasutajatestimisel testiti kolme inimesega, kelle otsimisel eelistati inimesi eelneva VR kogemusega. Kasutajatega sai testitud erinevaid elamuse osi. Elamuses liikumisega oli suurim probleem, et tehishüppamiseks pidi näpu täiesti puuteplaadilt ära võtma. Kasutajad oleks eelistanud näppu puuteplaadile jätta. Breakout VR elamus kasutajatele meeldis, aga mõnikord oli palli liikumine kasutajale mitte ennustatav. Vibu lasketiir oli kõige meeldivam elamus, aga inimesed tahtsid rohkem asju virtuaalse hoone peal vibuga teha. Hoone digitaalne 36
37 jäljendus inimestele meeldis, kuigi nad leidsid veel graafilisi vigu ning oleks soovinud ka rohkem korruseid näha. Elamus kasutajatele meeldis ning soovitaksid ka seda sõpradele, seega on olemas huvi projekti edasiarenduse ja kasutamise kohta. Töö autor tänab juhendajat Raimond-Hendrik Tunnelit abi ja soovituste eest ning AVGR laborit riistvara ja kastete keskkonna pakkumise eest. 37
38 Viidatud allikad Clifton, J., & Palmisano, S. (2019). Effects of steering locomotion and teleporting on cybersickness and presence in HMD-based virtual reality. Springer Nature, Jerald, J. (2015). The VR Book: Human-Centered Design for Virtual Reality. Morgan & Claypool Publishers. doi: / Leesment, A. (2020). Delta õppehoone visualisatsioon hoone ja keskkonna realistlikkus. Bakalaureusetöö, Arvutiteaduse Instituut, Tartu Ülikool. Allikas: ati_thesis/datasheet.php?id=69794&year=2020 Linde, E. (2019). Delta õppehoone visualisatsioon - visuaalsed efektid. Bakalaurusetöö, Arvutiteaduse Instituut, Tartu Ülikool. Allikas: /datasheet.php?id=66396&year=2019 Mayor, J., Raya, L., & Sanchez, A. (2019). A comparative study of virtual reality methods of interaction and locomotion based on presence, cybersickness and usability. IEEE Transactions on Emerging Topics in Computing, doi: /tetc Mike, S. (2016). Breakout. Kasutamise kuupäev: a., allikas The American Classic Arcade Museum: Nielsen, J. ( a.). Why You Only Need to Test with 5 Users. Kasutamise kuupäev: a., allikas Nielsen Norman Group: Nikolajev, A. (2018). Delta Building Visualisation and Optimisation. Bakalaurusetöö, Arvutiteaduse Instituut, Tartu Ülikool. Allikas: ati_thesis/datasheet.php?id=61825&year=2018&language=en Zimmerman, E. (2003). Play as Research: The Iterative Design Process. rmt: B. Laurel, & P. Lunenfeld, Design Research: Methods and Perspectives (lk ). Voitenko, A. (2018). Delta õppehoone keskkonna visualiseerimine. Bakalaurusetöö, Arvutiteaduse Instituut, Tartu Ülikool. Allikas: ati_thesis/datasheet.php?id=61937&year=2018&language=et 38
39 Lisad I. Sõnastik 1. Tipp (ingl vertex) on arvutigraafikas kahe või enama külje ühine punkt Tehishüpe (ingl teleport) on kasutaja ühest punktist teisse liikumine hetkega Ruumiulatus (ingl room-scale) on virtuaalreaalsuse liikumisviis, kus kasutaja positsioon muutub samamoodi, nagu päriselus. Peab olema vähemalt 2 x 1.5 meetri suurune ruum SteamVR on tarkvara raamistik, mis lisab toe erinevatele peas kantavate prillidele Võrestik (ingl mesh) on hulknurkade tippudest, külgedes ja tahkudest koosnev kogum Digitaalne kaksik (ingl digital twin) on virtuaalne esindus objektist või süsteemist Huvipunkt (ingl point of interest) on kindel asukoht, kus saab midagi teha. 8. Asynchronous spacewarp on kaadriaja optimeerimise tehnika, kus tekitatakse uus kaader kasutades infot eelmisest kaadrist ning kasutaja positsiooni muutusest. Kui elamus ei saavuta sobivat kaadriaega, siis tekitatakse vahepealsed kaadrid sellega Varjatu praakimine (ingl occlusion culling) on protsess, mille käigus leitakse objektid, mis on muude objektide poolt varjatud. Leitud objekte ei renderdada Paus virtuaalreaalsuse kohalolekus (ingl break-in-presence) on hetk, kui isik saab aru, et ta tegelikkuses ei ole virtuaalses maailmas. 11. Collider on kuju, mida kasutatakse füüsika kokkupõrgete jaoks. Collider on nähtamatu ning ei pea klappima objekti võrestikuga Valguse küpsetamine (ingl lightmapping) on pindade heleduse ettearvutamine ning faili salvestamine Füüsika samm (ingl physics step) on Unity mängumootoris füüsika interaktsioonide ja muutuste arvutamise hetk. Iga sekund toimub kindel arv füüsika samme
40 II. Nõuded riistvarale A. Autori arvuti CPU: AMD Ryzen MHz GPU: NVIDIA GTX GB RAM: 4xDDR4 8GB 3000MHz SSD: ADATA SX8200PNP 1TB NVMe VR: Oculus Rift S 2,560 x 80Hz B. CGVR-Torrance (AVGR labori arvuti) CPU: AMD Ryzen R9-3900X 4.6GHz GPU: NVIDIA RTX 2080S 8GB RAM: 2xDDR4 16GB 3200Mhz SSD: 1TB Intel 660p M.2 NVMe VR: HTC Vive Pro 2880 x 90Hz MF1. Maksimaalne 99-kvantiil kaadriaeg 11,1ms Vive Pro peal. 40


41 III. Pildid rakendusest 41


42 42


43 43


44 44
45 45


46 46

. Valida Settings.")
47 IV. Kasutajajuhend DeltaVR elamus toetab mitmeid erinevaid virtuaalreaalsuse prille ja raamistike. DeltaVR on ainult testitud SteamVR ja Oculuse tarkvaraga. Teised tarkvarad võivad ka töötada, kuigi need on testimata ning tugi ei ole garanteeritud. Ideaalne kombinatsioon on SteamVR ja HTC Vive Pro, millest mõlemad on saadaval AVGR laboris. Kui arvutis on saadaval mitu erinevat raamistiku, valib elamus automaatselt OpenXR standardi alusel määratud vaikimisi raamistiku. Vajadusel saab vaikimisi raamistiku määrata SteamVR raamistikuks läbi SteamVR Settings menüü. Selle jaoks tuleb käima panna SteamVR. Avada hamburgeri menüü ( ). Valida Settings. Määrata Advanced Settings Showiks. Valida Developer alammenüü, ning sealt valida SET STEAMVR AS OPENXR RUNTIME. Elamuse saab käima panna läbi DeltaVR.exe faili, mis asub kasustas DeltaVR Build. Samuti on võimalik elamus ise kompileerida, kasutades lähtekoodi Unity f LTS versiooni. Lähtekood on kaustas DeltaVR Source. 47
: 1) Paremat puuteplaati otse vajutada tehishüppamine.")
48 Joonis 28: Parema käe HTC Vive Pro pult. Elamuse kontrollideks HTC Pro Vive prillidel on (vt Joonis 28): 1) Paremat puuteplaati otse vajutada tehishüppamine. 2) Paremat puuteplaati vasakule või paremale vajutada pööramine 45 kraadi vast 3) avalt vajutuse suunale. 4) Trigger/Grip nupp Asjade kätte võtmine. 48
49 V. Failid Tööga kaasatulevas arhiivi struktuur on järgnev: /DeltaVR Build/ - sisaldab kompileeritud versiooni mängust. /DeltaVR Graafid/ - sisaldab nii kasutajatestimise kui ka jõudlustestimise tulemusi. /DeltaVR Graafid/Performance Testing/- sisaldab jõudlusttestimise tulemusi ja andmeid. /DeltaVR Graafid/Usability Testing/- sisaldab kasutajatestimise tulemusi ja andmeid. /DeltaVR Source/ - sisaldab elamuse lähtekoodi. /DeltaVR Videod/ - sisaldab videot elamusest. 49
50 VI. Litsents Lihtlitsents lõputöö reprodutseerimiseks ja üldsusele kättesaadavaks tegemiseks Mina, Toomas Tamm, 1. annan Tartu Ülikoolile tasuta loa (lihtlitsentsi) minu loodud teose DeltaVR, mille juhendaja on Raimond-Hendrik Tunnel, reprodutseerimiseks eesmärgiga seda säilitada, sealhulgas lisada digitaalarhiivi DSpace kuni autoriõiguse kehtivuse lõppemiseni. 2. Annan Tartu Ülikoolile loa teha punktis 1 nimetatud teos üldsusele kättesaadavaks Tartu Ülikooli veebikeskkonna, sealhulgas digitaalarhiivi DSpace kaudu Creative Commonsi litsentsiga CC BY NC ND 3.0, mis lubab autorile viidates teost reprodutseerida, levitada ja üldsusele suunata ning keelab luua tuletatud teost ja kasutada teost ärieesmärgil, kuni autoriõiguse kehtivuse lõppemiseni. 3. Olen teadlik, et punktides 1 ja 2 nimetatud õigused jäävad alles ka autorile. 4. Kinnitan, et lihtlitsentsi andmisega ei riku ma teiste isikute intellektuaalomandi ega isikuandmete kaitse õigusaktidest tulenevaid õigusi. Toomas Tamm
DJI GOGGLES Kiirjuhend V1.0
 DJI GOGGLES Kiirjuhend V1.0 DJI Goggles DJI Goggles on mugavad prillid, mis on disainitud mugavaks FPV lendamiseks DJI toodetega. Nad loovad ultra-kõrge kvaliteediga pildi, minimaalse viivitusega pikamaa
DJI GOGGLES Kiirjuhend V1.0 DJI Goggles DJI Goggles on mugavad prillid, mis on disainitud mugavaks FPV lendamiseks DJI toodetega. Nad loovad ultra-kõrge kvaliteediga pildi, minimaalse viivitusega pikamaa
B120_10 estonian.cdr
 Alati seal, et teid aidata Registreerige oma toode ja otsige abi koduleheküljelt www.philips.com/welcome B120 Beebimonitor Küsimus? Kontakteeruge Philipsiga Eestikeelne kasutusjuhend 2 Valgussensor USB
Alati seal, et teid aidata Registreerige oma toode ja otsige abi koduleheküljelt www.philips.com/welcome B120 Beebimonitor Küsimus? Kontakteeruge Philipsiga Eestikeelne kasutusjuhend 2 Valgussensor USB
6 tsooniga keskus WFHC MASTER RF 868MHz & 4 või 6 tsooniga alaseade SLAVE RF KASUTUSJUHEND 6 tsooniga WFHC RF keskus & 4 või 6 tsooniga alaseade SLAVE
 6 tsooniga keskus WFHC MASTER RF 868MHz & 4 või 6 tsooniga alaseade SLAVE RF KASUTUSJUHEND 6 tsooniga WFHC RF keskus & 4 või 6 tsooniga alaseade SLAVE RF 868MHz 3-6 EE 1. KASUTUSJUHEND 6 tsooniga WFHC
6 tsooniga keskus WFHC MASTER RF 868MHz & 4 või 6 tsooniga alaseade SLAVE RF KASUTUSJUHEND 6 tsooniga WFHC RF keskus & 4 või 6 tsooniga alaseade SLAVE RF 868MHz 3-6 EE 1. KASUTUSJUHEND 6 tsooniga WFHC
Microsoft Word - installation-guide.doc
 Dokumendi ajalugu: Versioon Kuupäev Tegevus Autor 1.0 12.04.2008 Dokumendi loomine Maris Aavik 1.1 13.04.2008 Täiendamine Maris Aavik 1.2 13.04.2008 Täiendamine Andres Kalle 1.3 12.05.2008 Täiendused Kerli
Dokumendi ajalugu: Versioon Kuupäev Tegevus Autor 1.0 12.04.2008 Dokumendi loomine Maris Aavik 1.1 13.04.2008 Täiendamine Maris Aavik 1.2 13.04.2008 Täiendamine Andres Kalle 1.3 12.05.2008 Täiendused Kerli
Kom igang med Scratch
 Alustame algusest Getting Started versioon 1.4 SCRATCH on uus programmeerimiskeel, mis lubab sul endal luua interaktiivseid annimatsioone, lugusid, mänge, muusikat, taieseid jm Scratch'i saab kasutada
Alustame algusest Getting Started versioon 1.4 SCRATCH on uus programmeerimiskeel, mis lubab sul endal luua interaktiivseid annimatsioone, lugusid, mänge, muusikat, taieseid jm Scratch'i saab kasutada
Programmi AnimatorDV Simple+ lühike kasutajajuhend
 Programmi AnimatorDV Simple+ esmane kasutusjuhend Programm AnimatorDV Simple+ on mõeldud animatsioonide loomiseks. Tegemist on tasuta tarkvaraga, mis töötab videoseadmetega (videokaamera, veebikaamera).
Programmi AnimatorDV Simple+ esmane kasutusjuhend Programm AnimatorDV Simple+ on mõeldud animatsioonide loomiseks. Tegemist on tasuta tarkvaraga, mis töötab videoseadmetega (videokaamera, veebikaamera).
CPA4164 USB 2.0 kõrgekvaliteediline videoadapter KASUTUSJUHEND 1. PEATÜKK - Ülevaade 1.1 Tutvustus CPA4164 USB 2.0 videoadapter võimaldab teil arvutis
 CPA4164 USB 2.0 kõrgekvaliteediline videoadapter KASUTUSJUHEND 1. PEATÜKK - Ülevaade 1.1 Tutvustus CPA4164 USB 2.0 videoadapter võimaldab teil arvutisse laadida ja redigeerida erinevatest analoogvideo
CPA4164 USB 2.0 kõrgekvaliteediline videoadapter KASUTUSJUHEND 1. PEATÜKK - Ülevaade 1.1 Tutvustus CPA4164 USB 2.0 videoadapter võimaldab teil arvutisse laadida ja redigeerida erinevatest analoogvideo
PÄRNU TÄISKASVANUTE GÜMNAASIUM ESITLUSE KOOSTAMISE JUHEND Pärnu 2019
 PÄRNU TÄISKASVANUTE GÜMNAASIUM ESITLUSE KOOSTAMISE JUHEND Pärnu 2019 SISUKORD 1. SLAIDIESITLUS... 3 1.1. Esitlustarkvara... 3 1.2. Slaidiesitluse sisu... 3 1.3. Slaidiesitluse vormistamine... 4 1.3.1 Slaidid...
PÄRNU TÄISKASVANUTE GÜMNAASIUM ESITLUSE KOOSTAMISE JUHEND Pärnu 2019 SISUKORD 1. SLAIDIESITLUS... 3 1.1. Esitlustarkvara... 3 1.2. Slaidiesitluse sisu... 3 1.3. Slaidiesitluse vormistamine... 4 1.3.1 Slaidid...
Document number:
 WNR Kiirpaigaldusjuhend Lisateavet, juhised ja uuendused saab leida internetist aadressil http://www.a-link.com Kiirpaigaldusjuhend Komplekt sisaldab: - WNR repiiter - Paigaldusjuhend Ühendused / Ports:
WNR Kiirpaigaldusjuhend Lisateavet, juhised ja uuendused saab leida internetist aadressil http://www.a-link.com Kiirpaigaldusjuhend Komplekt sisaldab: - WNR repiiter - Paigaldusjuhend Ühendused / Ports:
ArcGIS Online Konto loomine Veebikaardi loomine Rakenduste tegemine - esitlus
 PILVI TAUER Tallinna Tehnikagümnaasium ArcGIS Online 1.Konto loomine 2.Veebikaardi loomine 3.Rakenduste tegemine - esitlus Avaliku konto loomine Ava ArcGIS Online keskkond http://www.arcgis.com/ ning logi
PILVI TAUER Tallinna Tehnikagümnaasium ArcGIS Online 1.Konto loomine 2.Veebikaardi loomine 3.Rakenduste tegemine - esitlus Avaliku konto loomine Ava ArcGIS Online keskkond http://www.arcgis.com/ ning logi
Microsoft Word - Toetuste veebikaardi juhend
 Toetuste veebikaardi juhend Toetuste veebikaardi ülesehitus Joonis 1 Toetuste veebikaardi vaade Toetuste veebikaardi vaade jaguneb tinglikult kaheks: 1) Statistika valikute osa 2) Kaardiaken Statistika
Toetuste veebikaardi juhend Toetuste veebikaardi ülesehitus Joonis 1 Toetuste veebikaardi vaade Toetuste veebikaardi vaade jaguneb tinglikult kaheks: 1) Statistika valikute osa 2) Kaardiaken Statistika
Tartu Ülikool Arvutiteaduse Instituut Informaatika õppekava Salme Ussanov Kolmemõõtmelise kasutajaliidese disain ja arendus Bakalaureusetöö (9 EAP) Ju
 Ju") Tartu Ülikool Arvutiteaduse Instituut Informaatika õppekava Salme Ussanov Kolmemõõtmelise kasutajaliidese disain ja arendus Bakalaureusetöö (9 EAP) Juhendaja: Madis Vasser, MSc Tartu 2019 Kolmemõõtmelise
Tartu Ülikool Arvutiteaduse Instituut Informaatika õppekava Salme Ussanov Kolmemõõtmelise kasutajaliidese disain ja arendus Bakalaureusetöö (9 EAP) Juhendaja: Madis Vasser, MSc Tartu 2019 Kolmemõõtmelise
Mida räägivad logid programmeerimisülesande lahendamise kohta? Heidi Meier
 Mida räägivad logid programmeerimisülesande lahendamise kohta? Heidi Meier 09.02.2019 Miks on ülesannete lahendamise käigu kohta info kogumine oluline? Üha rohkem erinevas eas inimesi õpib programmeerimist.
Mida räägivad logid programmeerimisülesande lahendamise kohta? Heidi Meier 09.02.2019 Miks on ülesannete lahendamise käigu kohta info kogumine oluline? Üha rohkem erinevas eas inimesi õpib programmeerimist.
Juhend nutiterminali seadistamiseks ja kaardimaksete vastuvõtmiseks Ingenico Link/2500 ja icmp
 Juhend nutiterminali seadistamiseks ja kaardimaksete vastuvõtmiseks Ingenico Link/2500 ja icmp Terminali seadistamine Lülita telefonis või tahvelarvutis (edaspidi telefonis) sisse Bluetooth. (1) 1 1 Mudel
Juhend nutiterminali seadistamiseks ja kaardimaksete vastuvõtmiseks Ingenico Link/2500 ja icmp Terminali seadistamine Lülita telefonis või tahvelarvutis (edaspidi telefonis) sisse Bluetooth. (1) 1 1 Mudel
Tarkvaraline raadio Software defined radio (SDR) Jaanus Kalde 2017
 Jaanus Kalde 2017") Tarkvaraline raadio Software defined radio (SDR) Jaanus Kalde 2017 Sissejuhatus Raadiosidest üldiselt Tarkvaraline raadio Kuidas alustada 2 Raadioside Palju siinussignaale õhus Info edastamiseks moduleerid
Tarkvaraline raadio Software defined radio (SDR) Jaanus Kalde 2017 Sissejuhatus Raadiosidest üldiselt Tarkvaraline raadio Kuidas alustada 2 Raadioside Palju siinussignaale õhus Info edastamiseks moduleerid
Microsoft Word - requirements.doc
 Dokumendi ajalugu: Versioon Kuupäev Tegevus Autor 1.0 04.03.2008 Dokumendi loomine Madis Abel 1.1 09.03.2008 Kasutuslugude loomine Madis Abel 1.2 12.03.2008 Kasutuslugude täiendused Andres Kalle 1.3 13.03.2008
Dokumendi ajalugu: Versioon Kuupäev Tegevus Autor 1.0 04.03.2008 Dokumendi loomine Madis Abel 1.1 09.03.2008 Kasutuslugude loomine Madis Abel 1.2 12.03.2008 Kasutuslugude täiendused Andres Kalle 1.3 13.03.2008
Delta õppehoone visualisatsioon – visuaalsed efektid
 TARTU ÜLIKOOL Arvutiteaduse instituut Informaatika õppekava Einar Linde Delta õppehoone visualisatsioon visuaalsed efektid Bakalaureusetöö (9 EAP) Juhendaja: Raimond-Hendrik Tunnel, MSc Tartu 2019 Delta
TARTU ÜLIKOOL Arvutiteaduse instituut Informaatika õppekava Einar Linde Delta õppehoone visualisatsioon visuaalsed efektid Bakalaureusetöö (9 EAP) Juhendaja: Raimond-Hendrik Tunnel, MSc Tartu 2019 Delta
MS Word Sisukord Uue dokumendi loomine... 2 Dokumendi salvestamine... 3 Faili nimi... 4 Teksti sisestamine... 6 Klaviatuuril mitteleiduvat sümbolite l
 MS Word Sisukord Uue dokumendi loomine... 2 Dokumendi salvestamine... 3 Faili nimi... 4 Teksti sisestamine... 6 Klaviatuuril mitteleiduvat sümbolite lisamine... 6 Uue dokumendi loomine Dokumendi salvestamine
MS Word Sisukord Uue dokumendi loomine... 2 Dokumendi salvestamine... 3 Faili nimi... 4 Teksti sisestamine... 6 Klaviatuuril mitteleiduvat sümbolite lisamine... 6 Uue dokumendi loomine Dokumendi salvestamine
(10. kl. I kursus, Teisendamine, kiirusega, kesk.kiirusega \374lesanded)
") TEISENDAMINE Koostanud: Janno Puks 1. Massiühikute teisendamine Eesmärk: vajalik osata teisendada tonne, kilogramme, gramme ja milligramme. Teisenda antud massiühikud etteantud ühikusse: a) 0,25 t = kg
TEISENDAMINE Koostanud: Janno Puks 1. Massiühikute teisendamine Eesmärk: vajalik osata teisendada tonne, kilogramme, gramme ja milligramme. Teisenda antud massiühikud etteantud ühikusse: a) 0,25 t = kg
SAF 7 demo paigaldus. 1.Eeldused SAF 7 demo vajab 32- või 64-bitist Windows 7, Window 8, Windows 10, Windows Server 2008 R2, Windows Server 2012, Wind
 SAF 7 demo paigaldus. 1.Eeldused SAF 7 demo vajab 32- või 64-bitist Windows 7, Window 8, Windows 10, Windows Server 2008 R2, Windows Server 2012, Windows Server 2012 R2, Windows Server 2016 või Windows
SAF 7 demo paigaldus. 1.Eeldused SAF 7 demo vajab 32- või 64-bitist Windows 7, Window 8, Windows 10, Windows Server 2008 R2, Windows Server 2012, Windows Server 2012 R2, Windows Server 2016 või Windows
Õppematerjalide esitamine Moodle is (alustajatele) seminar sarjas Lõunatund e-õppega 12. septembril 2017 õppedisainerid Ly Sõõrd (LT valdkond) ja Dian
 seminar sarjas Lõunatund e-õppega 12. septembril 2017 õppedisainerid Ly Sõõrd (LT valdkond) ja Dian") Õppematerjalide esitamine Moodle is (alustajatele) seminar sarjas Lõunatund e-õppega 12. septembril 2017 õppedisainerid Ly Sõõrd (LT valdkond) ja Diana Lõvi (SV valdkond) Järgmised e-lõunad: 10. oktoober
Õppematerjalide esitamine Moodle is (alustajatele) seminar sarjas Lõunatund e-õppega 12. septembril 2017 õppedisainerid Ly Sõõrd (LT valdkond) ja Diana Lõvi (SV valdkond) Järgmised e-lõunad: 10. oktoober
Tartu Ülikool
 Tartu Ülikool Code coverage Referaat Koostaja: Rando Mihkelsaar Tartu 2005 Sissejuhatus Inglise keelne väljend Code coverage tähendab eesti keeles otse tõlgituna koodi kaetust. Lahti seletatuna näitab
Tartu Ülikool Code coverage Referaat Koostaja: Rando Mihkelsaar Tartu 2005 Sissejuhatus Inglise keelne väljend Code coverage tähendab eesti keeles otse tõlgituna koodi kaetust. Lahti seletatuna näitab
(Microsoft Word - T\366\366leht m\365isaprogramm 4-6 kl tr\374kkimiseks.doc)
") 4-6 KLASS 1 Minu nimi on Ma olen praegu Täna on 1. KÄRNERIMAJA JA LILLED Kirjuta või joonista siia kolm kärneri tööriista Kirjuta siia selle taime nimi, 1. TÖÖRIIST 2. TÖÖRIIST 3. TÖÖRIIST mida istutasid
4-6 KLASS 1 Minu nimi on Ma olen praegu Täna on 1. KÄRNERIMAJA JA LILLED Kirjuta või joonista siia kolm kärneri tööriista Kirjuta siia selle taime nimi, 1. TÖÖRIIST 2. TÖÖRIIST 3. TÖÖRIIST mida istutasid
NR-2.CDR
 2. Sõidutee on koht, kus sõidavad sõidukid. Jalakäija jaoks on kõnnitee. Kõnnitee paikneb tavaliselt mõlemal pool sõiduteed. Kõige ohutum on sõiduteed ületada seal, kus on jalakäijate tunnel, valgusfoor
2. Sõidutee on koht, kus sõidavad sõidukid. Jalakäija jaoks on kõnnitee. Kõnnitee paikneb tavaliselt mõlemal pool sõiduteed. Kõige ohutum on sõiduteed ületada seal, kus on jalakäijate tunnel, valgusfoor
Image segmentation
 Image segmentation Mihkel Heidelberg Karl Tarbe Image segmentation Image segmentation Thresholding Watershed Region splitting and merging Motion segmentation Muud meetodid Thresholding Lihtne Intuitiivne
Image segmentation Mihkel Heidelberg Karl Tarbe Image segmentation Image segmentation Thresholding Watershed Region splitting and merging Motion segmentation Muud meetodid Thresholding Lihtne Intuitiivne
Estonian_TBW-106UB(V1).cdr
.cdr") Lühike paigaldusjuhend TBW-106UB H/W: V1 Sisukord... 1 1. Enne alustamist... 1 2. Kuidas paigaldada... 3. Bluetooth adapteriseadistamine... 2 5 Tõrkeotsing... 7 Version 02.17.2009 1. Enne alustamist Pakendi
Lühike paigaldusjuhend TBW-106UB H/W: V1 Sisukord... 1 1. Enne alustamist... 1 2. Kuidas paigaldada... 3. Bluetooth adapteriseadistamine... 2 5 Tõrkeotsing... 7 Version 02.17.2009 1. Enne alustamist Pakendi
G aiasoft Programmi VERP ja Omniva Arvekeskuse liidese häälestamine ja arvete saatmine-lugemine VERP 6.3 ja VERP 6.3E Versioon ja hilisemad K
 Programmi VERP ja Omniva Arvekeskuse liidese häälestamine ja arvete saatmine-lugemine VERP 6.3 ja VERP 6.3E Versioon 6.3.1.51 ja hilisemad Kasutaja juhend 2016 Sisukord 1. Sissejuhatus...3 2. Liidese häälestus...3
Programmi VERP ja Omniva Arvekeskuse liidese häälestamine ja arvete saatmine-lugemine VERP 6.3 ja VERP 6.3E Versioon 6.3.1.51 ja hilisemad Kasutaja juhend 2016 Sisukord 1. Sissejuhatus...3 2. Liidese häälestus...3
TARTU ÜLIKOOL Arvutiteaduse instituut Informaatika õppekava Kerstin Äkke Peeglite kasutamine arvutimängus Bakalaureusetöö (9 EAP) Juhendaja: Raimond-H
 Juhendaja: Raimond-H") TARTU ÜLIKOOL Arvutiteaduse instituut Informaatika õppekava Kerstin Äkke Peeglite kasutamine arvutimängus Bakalaureusetöö (9 EAP) Juhendaja: Raimond-Hendrik Tunnel, MSc Tartu 2018 Peeglite kasutamine arvutimängus
TARTU ÜLIKOOL Arvutiteaduse instituut Informaatika õppekava Kerstin Äkke Peeglite kasutamine arvutimängus Bakalaureusetöö (9 EAP) Juhendaja: Raimond-Hendrik Tunnel, MSc Tartu 2018 Peeglite kasutamine arvutimängus
Control no:
 Smart Access Driftsprocedure A. Eeltingimused... 2 1. Nutitelefoni ühilduvus... 2 2. Kaabli valik... 2 a. Apple devices (Apple'i seadmed) (iphone 4/4S)... 2 b. Apple devices (Apple'i seadmed) (iphone 5/5c/5s)...
Smart Access Driftsprocedure A. Eeltingimused... 2 1. Nutitelefoni ühilduvus... 2 2. Kaabli valik... 2 a. Apple devices (Apple'i seadmed) (iphone 4/4S)... 2 b. Apple devices (Apple'i seadmed) (iphone 5/5c/5s)...
Microsoft PowerPoint - loeng.ppt
 Tarkvaraarendusprotsess Lektor Oleg Mürk olegm@webmedia.ee Webmedia AS www.webmedia.ee Teema Mille poolest erineb üksinda programmeerimine mitmekesi tarkvaraarendamisest? Mitmekesi programmeerimine Mitmekesi
Tarkvaraarendusprotsess Lektor Oleg Mürk olegm@webmedia.ee Webmedia AS www.webmedia.ee Teema Mille poolest erineb üksinda programmeerimine mitmekesi tarkvaraarendamisest? Mitmekesi programmeerimine Mitmekesi
Monitooring
 IT infrastruktuuri teenused Monitooring Margus Ernits margus.ernits@itcollege.ee 1 Miks? Arvutisüsteemid töötavad tõrgetega Pole olemas 100% veakindlaid ja keerulisi arvutisüsteeme Tõrgetest võib teada
IT infrastruktuuri teenused Monitooring Margus Ernits margus.ernits@itcollege.ee 1 Miks? Arvutisüsteemid töötavad tõrgetega Pole olemas 100% veakindlaid ja keerulisi arvutisüsteeme Tõrgetest võib teada
Elisa Ring Elisa Ringi mobiilirakendus Versioon
 Elisa Ring Elisa Ringi mobiilirakendus Versioon 1.0.85 15.01.2019 1 Elisa Ring... 1 1. Ülevaade... 3 1.1. Kirjeldus... 3 1.2. Tehnilised tingimused... 3 1.3. Kasutuselevõtt ja sisselogimine... 3 2. Rakenduse
Elisa Ring Elisa Ringi mobiilirakendus Versioon 1.0.85 15.01.2019 1 Elisa Ring... 1 1. Ülevaade... 3 1.1. Kirjeldus... 3 1.2. Tehnilised tingimused... 3 1.3. Kasutuselevõtt ja sisselogimine... 3 2. Rakenduse
Pintsli otsade juurde tegemine Esiteks Looge pilt suurusega 64x64 ja tema taustaks olgu läbipaistev kiht (Transparent). Teiseks Minge kihtide (Layers)
. Teiseks Minge kihtide (Layers)") Pintsli otsade juurde tegemine Esiteks Looge pilt suurusega 64x64 ja tema taustaks olgu läbipaistev kiht (Transparent). Teiseks Minge kihtide (Layers) aknasse ja looge kaks läbipaistvat kihti juurde. Pange
Pintsli otsade juurde tegemine Esiteks Looge pilt suurusega 64x64 ja tema taustaks olgu läbipaistev kiht (Transparent). Teiseks Minge kihtide (Layers) aknasse ja looge kaks läbipaistvat kihti juurde. Pange
SINU UKS DIGITAALSESSE MAAILMA Ruuter Zyxel LTE3302 JUHEND INTERNETI ÜHENDAMISEKS
 SINU UKS DIGITAALSESSE MAAILMA Ruuter Zyxel LTE3302 JUHEND INTERNETI ÜHENDAMISEKS OLULINE TEAVE: LOE ENNE RUUTERI ÜHENDAMIST! Ruuter on sinu uks digitaalsesse maailma. Siit saavad alguse kõik Telia teenused
SINU UKS DIGITAALSESSE MAAILMA Ruuter Zyxel LTE3302 JUHEND INTERNETI ÜHENDAMISEKS OLULINE TEAVE: LOE ENNE RUUTERI ÜHENDAMIST! Ruuter on sinu uks digitaalsesse maailma. Siit saavad alguse kõik Telia teenused
EE-macbook-retina-12-early2015-qs.indd
 Kiirjuhend Tervita oma MacBooki. Alustame. Maci käivitamiseks vajuta toitenuppu ning rakendus Setup Assistant annab sulle mõned lihtsad juhised, kuidas arvuti töökorda seada. See aitab sul Wi-Fi võrku
Kiirjuhend Tervita oma MacBooki. Alustame. Maci käivitamiseks vajuta toitenuppu ning rakendus Setup Assistant annab sulle mõned lihtsad juhised, kuidas arvuti töökorda seada. See aitab sul Wi-Fi võrku
Microsoft Word - essee_CVE ___KASVANDIK_MARKKO.docx
 Tartu Ülikool CVE-2013-7040 Referaat aines Andmeturve Autor: Markko Kasvandik Juhendaja : Meelis Roos Tartu 2015 1.CVE 2013 7040 olemus. CVE 2013 7040 sisu seisneb krüptograafilises nõrkuses. Turvaaugu
Tartu Ülikool CVE-2013-7040 Referaat aines Andmeturve Autor: Markko Kasvandik Juhendaja : Meelis Roos Tartu 2015 1.CVE 2013 7040 olemus. CVE 2013 7040 sisu seisneb krüptograafilises nõrkuses. Turvaaugu
Hoia oma arvuti turvaline ja kiire 1.Leia start nupust alustades Juhtpaneel 2.Juhtpaneeli aadressiribalt leia Kõik juhtpaneeli üksused 3.Avanenud tööa
 Hoia oma arvuti turvaline ja kiire 1.Leia start nupust alustades Juhtpaneel 2.Juhtpaneeli aadressiribalt leia Kõik juhtpaneeli üksused 3.Avanenud tööaknas leia Windows Update 4.Lase arvutil kontrollida
Hoia oma arvuti turvaline ja kiire 1.Leia start nupust alustades Juhtpaneel 2.Juhtpaneeli aadressiribalt leia Kõik juhtpaneeli üksused 3.Avanenud tööaknas leia Windows Update 4.Lase arvutil kontrollida
X Window System tuntud kui: X11, X, X-Windows akendussüsteem/akendesüsteem rastergraafikat toetavatele ekraanidele UNIX-maailmas väga levinud mitmesug
 X Window System tuntud kui: X11, X, X-Windows akendussüsteem/akendesüsteem rastergraafikat toetavatele ekraanidele UNIX-maailmas väga levinud mitmesugused realisatsioonid ka Windowsile erinevad realisatsioonid
X Window System tuntud kui: X11, X, X-Windows akendussüsteem/akendesüsteem rastergraafikat toetavatele ekraanidele UNIX-maailmas väga levinud mitmesugused realisatsioonid ka Windowsile erinevad realisatsioonid
loeng7.key
 Grammatikate elustamine JFLAPiga Vesal Vojdani (TÜ Arvutiteaduse Instituut) Otse Elust: Java Spec https://docs.oracle.com/javase/specs/jls/se8/html/ jls-14.html#jls-14.9 Kodutöö (2. nädalat) 1. Avaldise
Grammatikate elustamine JFLAPiga Vesal Vojdani (TÜ Arvutiteaduse Instituut) Otse Elust: Java Spec https://docs.oracle.com/javase/specs/jls/se8/html/ jls-14.html#jls-14.9 Kodutöö (2. nädalat) 1. Avaldise
Mida me teame? Margus Niitsoo
 Mida me teame? Margus Niitsoo Tänased teemad Tagasisidest Õppimisest TÜ informaatika esmakursuslased Väljalangevusest Üle kogu Ülikooli TÜ informaatika + IT Kokkuvõte Tagasisidest NB! Tagasiside Tagasiside
Mida me teame? Margus Niitsoo Tänased teemad Tagasisidest Õppimisest TÜ informaatika esmakursuslased Väljalangevusest Üle kogu Ülikooli TÜ informaatika + IT Kokkuvõte Tagasisidest NB! Tagasiside Tagasiside
Loeng03
 Loeng 03 Failiõigused ja -manipulatsioon Operatsioonisüsteemide administreerimine ja sidumine I233 Katrin Loodus, Tallinn 2015 Failid ja kataloogid Mis on fail? Linuxi laadsetes süsteemides on kõik failid
Loeng 03 Failiõigused ja -manipulatsioon Operatsioonisüsteemide administreerimine ja sidumine I233 Katrin Loodus, Tallinn 2015 Failid ja kataloogid Mis on fail? Linuxi laadsetes süsteemides on kõik failid
G OSA A VARIANT RESPONDENDILE ISE TÄITMISEKS
 G OSA A VARIANT RESPONDENDILE ISE TÄITMISEKS GS1 Järgnevalt on kirjeldatud lühidalt mõningaid inimesi. Palun lugege iga kirjeldust ja märkige igale reale, kuivõrd Teie see inimene on. Väga Minu Mõnevõrra
G OSA A VARIANT RESPONDENDILE ISE TÄITMISEKS GS1 Järgnevalt on kirjeldatud lühidalt mõningaid inimesi. Palun lugege iga kirjeldust ja märkige igale reale, kuivõrd Teie see inimene on. Väga Minu Mõnevõrra
KIIRJUHEND Lugege kiirjuhend enne seadme kasutamist hoolikalt läbi. Kõik tärniga (*) märgitud juhised kehtivad WLAN + 3G mudelitele (Lenovo B6000-H(V)
 märgitud juhised kehtivad WLAN + 3G mudelitele (Lenovo B6000-H(V)") KIIRJUHEND Lugege kiirjuhend enne seadme kasutamist hoolikalt läbi. Kõik tärniga (*) märgitud juhised kehtivad WLAN + 3G mudelitele (Lenovo B6000-H(V) / Lenovo B8000-H). Tehnilised andmed Mudeli nimetus
KIIRJUHEND Lugege kiirjuhend enne seadme kasutamist hoolikalt läbi. Kõik tärniga (*) märgitud juhised kehtivad WLAN + 3G mudelitele (Lenovo B6000-H(V) / Lenovo B8000-H). Tehnilised andmed Mudeli nimetus
3D mänguarenduse kursus (MTAT ) Loeng 3 Jaanus Uri 2013
 Loeng 3 Jaanus Uri 2013") 3D mänguarenduse kursus (MTAT.03.283) Loeng 3 Jaanus Uri 2013 Teemad Tee leidmine ja navigatsioon Andmete protseduuriline genereerimine Projektijuhtimine Tee leidmine Navigatsiooni võrgustik (navigation
3D mänguarenduse kursus (MTAT.03.283) Loeng 3 Jaanus Uri 2013 Teemad Tee leidmine ja navigatsioon Andmete protseduuriline genereerimine Projektijuhtimine Tee leidmine Navigatsiooni võrgustik (navigation
Microsoft Word - TallinnLV_lihtsustatud_manual_asutuse_juhataja_ doc
 Tallinna Linnavalitsuse sõnumisaatja kasutusjuhend asutuse juhatajale Sisukord 1. Süsteemi sisenemine...2 2. Parooli lisamine ja vahetamine...2 3. Ametnike lisamine ametiasutuse juurde...2 4. Saatjanimede
Tallinna Linnavalitsuse sõnumisaatja kasutusjuhend asutuse juhatajale Sisukord 1. Süsteemi sisenemine...2 2. Parooli lisamine ja vahetamine...2 3. Ametnike lisamine ametiasutuse juurde...2 4. Saatjanimede
AG informaatika ainekava PK
 INFORMAATIKA AINEKAVA PÕHIKOOLIS Õppe- ja kasvatuseesmärgid Põhikooli informaatikaõpetusega taotletakse, et õpilane: 1) valdab peamisi töövõtteid arvutil igapäevases õppetöös eelkõige infot otsides, töödeldes
INFORMAATIKA AINEKAVA PÕHIKOOLIS Õppe- ja kasvatuseesmärgid Põhikooli informaatikaõpetusega taotletakse, et õpilane: 1) valdab peamisi töövõtteid arvutil igapäevases õppetöös eelkõige infot otsides, töödeldes
Võistlusülesanne Vastutuulelaev Finaal
 Võistlusülesanne Vastutuulelaev Finaal CADrina 2016 võistlusülesannete näol on tegemist tekst-pilt ülesannetega, milliste lahendamiseks ei piisa ainult jooniste ülevaatamisest, vaid lisaks piltidele tuleb
Võistlusülesanne Vastutuulelaev Finaal CADrina 2016 võistlusülesannete näol on tegemist tekst-pilt ülesannetega, milliste lahendamiseks ei piisa ainult jooniste ülevaatamisest, vaid lisaks piltidele tuleb
Magnetic MRO
 3D-tehnoloogiad õhusõidukite hoolduses 3D Printimine / Virtuaalreaalsus/ 3D Skänneerimine Pärtel-Peeter Kruuv Interior Workshop supervisor Magnetic MRO Arendused: mis mõjutab, mida rakendada? IT Google
3D-tehnoloogiad õhusõidukite hoolduses 3D Printimine / Virtuaalreaalsus/ 3D Skänneerimine Pärtel-Peeter Kruuv Interior Workshop supervisor Magnetic MRO Arendused: mis mõjutab, mida rakendada? IT Google
(Microsoft PowerPoint - seminar_6_n\365uded-ainemudel tagasiside.ppt [Compatibility Mode])
![(Microsoft PowerPoint - seminar_6_n\365uded-ainemudel tagasiside.ppt [Compatibility Mode])](/thumbs/98/138957636.jpg "(Microsoft PowerPoint - seminar_6_n\365uded-ainemudel tagasiside.ppt [Compatibility Mode])") Tarkvara projekt seminar VI Eelmise iteratsiooni tagasivaade, testimine, installatsioonijuhend, järgmise iteratsiooni näited. Karel Kravik Administratiivset:protestid Probleem: protestide hulk ja kvaliteet
Tarkvara projekt seminar VI Eelmise iteratsiooni tagasivaade, testimine, installatsioonijuhend, järgmise iteratsiooni näited. Karel Kravik Administratiivset:protestid Probleem: protestide hulk ja kvaliteet
Microsoft Word - 56ylesanded1415_lõppvoor
 1. 1) Iga tärnike tuleb asendada ühe numbriga nii, et tehe oleks õige. (Kolmekohaline arv on korrutatud ühekohalise arvuga ja tulemuseks on neljakohaline arv.) * * 3 * = 2 * 1 5 Kas on õige, et nii on
1. 1) Iga tärnike tuleb asendada ühe numbriga nii, et tehe oleks õige. (Kolmekohaline arv on korrutatud ühekohalise arvuga ja tulemuseks on neljakohaline arv.) * * 3 * = 2 * 1 5 Kas on õige, et nii on
Microsoft Word - TM70_SP-MG_kasutusjuhend.docx
 TM70 Touch-i kasutusjuhend Süsteemid: Magellan ja Spectra SP Põhiekraan Kuupäev/kellaaeg Välis-/sisetemperatuur Süsteemi olek Tsoonid Menüü Info OneScreen Monitoring SpotOn Locator Slaidiesitus Paanika-häire
TM70 Touch-i kasutusjuhend Süsteemid: Magellan ja Spectra SP Põhiekraan Kuupäev/kellaaeg Välis-/sisetemperatuur Süsteemi olek Tsoonid Menüü Info OneScreen Monitoring SpotOn Locator Slaidiesitus Paanika-häire
PIKSELOITS Täpsustused 15.oktoobri 2018 seisuga Tants on loodud 1985.aasta tantsupeoks Muusika Lepo Sumra Koreograafia Helju Mikkel koostöös Lille- As
 PIKSELOITS Täpsustused 15.oktoobri 2018 seisuga Tants on loodud 1985.aasta tantsupeoks Muusika Lepo Sumra Koreograafia Helju Mikkel koostöös Lille- Astra Arraste ja "Sõlesepad" tantsurühma meestega. 2019.aasta
PIKSELOITS Täpsustused 15.oktoobri 2018 seisuga Tants on loodud 1985.aasta tantsupeoks Muusika Lepo Sumra Koreograafia Helju Mikkel koostöös Lille- Astra Arraste ja "Sõlesepad" tantsurühma meestega. 2019.aasta
View PDF
 Fitbit Ionic - ikoonilisest nutikellast natuke puudu, kuid spordiks ja kontoriks käib 11. aprill 2018-1:27 Autor: Kaido Einama Fitbiti nutikellad on balansseerinud pulsikella ja nutikella piiril ning viimasel
Fitbit Ionic - ikoonilisest nutikellast natuke puudu, kuid spordiks ja kontoriks käib 11. aprill 2018-1:27 Autor: Kaido Einama Fitbiti nutikellad on balansseerinud pulsikella ja nutikella piiril ning viimasel
EUPL v 1 1-all versions _4_
 Euroopa Liidu tarkvara vaba kasutuse litsents V.1.1 EUPL Euroopa Ühendus 2007 Euroopa Liidu tarkvara vaba kasutuse litsents ("EUPL") 1 kehtib allpool määratletud teose või tarkvara suhtes, mida levitatakse
Euroopa Liidu tarkvara vaba kasutuse litsents V.1.1 EUPL Euroopa Ühendus 2007 Euroopa Liidu tarkvara vaba kasutuse litsents ("EUPL") 1 kehtib allpool määratletud teose või tarkvara suhtes, mida levitatakse
Õppimine Anne Villems, Margus Niitsoo ja Konstantin Tretjakov
 Õppimine Anne Villems, Margus Niitsoo ja Konstantin Tretjakov Kava Kuulame Annet Essed ja Felder Õppimise teooriad 5 Eduka õppe reeglit 5 Olulisemat oskust Anne Loeng Mida uut saite teada andmebaasidest?
Õppimine Anne Villems, Margus Niitsoo ja Konstantin Tretjakov Kava Kuulame Annet Essed ja Felder Õppimise teooriad 5 Eduka õppe reeglit 5 Olulisemat oskust Anne Loeng Mida uut saite teada andmebaasidest?
Taskuprinter KASUTUSJUHEND
 Taskuprinter KASUTUSJUHEND Täname, et ostsite taskuprinteri Polaroid Mint. Käesoleva kasutusjuhendi eesmärk on anda teile juhiseid toote ohutuks kasutamiseks ja et see ei kujutaks endast kasutajale mingit
Taskuprinter KASUTUSJUHEND Täname, et ostsite taskuprinteri Polaroid Mint. Käesoleva kasutusjuhendi eesmärk on anda teile juhiseid toote ohutuks kasutamiseks ja et see ei kujutaks endast kasutajale mingit
PowerPoint Presentation
 Avaandmed Urmas Sinisalu Mis on avaandmed? Alus vs. Kohustus Avaandmed on kõigile vabalt ja avalikult kasutamiseks antud masinloetaval kujul andmed, millel puuduvad kasutamist ning levitamist takistavad
Avaandmed Urmas Sinisalu Mis on avaandmed? Alus vs. Kohustus Avaandmed on kõigile vabalt ja avalikult kasutamiseks antud masinloetaval kujul andmed, millel puuduvad kasutamist ning levitamist takistavad
Praks 1
 Biomeetria praks 6 Illustreeritud (mittetäielik) tööjuhend Eeltöö 1. Avage MS Excel is ankeedivastuseid sisaldav andmestik, 2. lisage uus tööleht, nimetage see ümber leheküljeks Praks6 ja 3. kopeerige
Biomeetria praks 6 Illustreeritud (mittetäielik) tööjuhend Eeltöö 1. Avage MS Excel is ankeedivastuseid sisaldav andmestik, 2. lisage uus tööleht, nimetage see ümber leheküljeks Praks6 ja 3. kopeerige
P9_10 estonian.cdr
 Registreerige oma toode ja saage abi kodulehelt www.philips.com/welcome P9/10 Eestikeelne kasutusjuhend 2 Ühendage P9 kõlar Bluetooth ühenduse kaudu oma Bluetooth seadmega, nagu näiteks ipadiga, iphone'iga,
Registreerige oma toode ja saage abi kodulehelt www.philips.com/welcome P9/10 Eestikeelne kasutusjuhend 2 Ühendage P9 kõlar Bluetooth ühenduse kaudu oma Bluetooth seadmega, nagu näiteks ipadiga, iphone'iga,
Tants on loodud 1985.aasta tantsupeoks Muusika Lepo Sumra Koreograafia Helju Mikkel koostöös Lille- Astra Arraste ja "Sõlesepad" tantsurühma meestega.
 Tants on loodud 1985.aasta tantsupeoks Muusika Lepo Sumra Koreograafia Helju Mikkel koostöös Lille- Astra Arraste ja "Sõlesepad" tantsurühma meestega. 2019.aasta tantsupeoks täpsustused ja täiendused tehtud
Tants on loodud 1985.aasta tantsupeoks Muusika Lepo Sumra Koreograafia Helju Mikkel koostöös Lille- Astra Arraste ja "Sõlesepad" tantsurühma meestega. 2019.aasta tantsupeoks täpsustused ja täiendused tehtud
Skriptimiskeeli, mida ei käsitletud Perl Python Visual Basic Script Edition (VBScript) MS DOS/cmd skriptid Windows PowerShell midagi eksootilisemat: G
 MS DOS/cmd skriptid Windows PowerShell midagi eksootilisemat: G") Skriptimiskeeli, mida ei käsitletud Perl Python Visual Basic Script Edition (VBScript) MS DOS/cmd skriptid Windows PowerShell midagi eksootilisemat: GIMP Script-Fu 1 Skriptimiskeeli: Perl v1.0 loodud Larry
Skriptimiskeeli, mida ei käsitletud Perl Python Visual Basic Script Edition (VBScript) MS DOS/cmd skriptid Windows PowerShell midagi eksootilisemat: GIMP Script-Fu 1 Skriptimiskeeli: Perl v1.0 loodud Larry
ArcGIS rakendused välitöödeks Raido Valdmaa AlphaGIS
 ArcGIS rakendused välitöödeks Raido Valdmaa AlphaGIS Välitöö rakendused kasuta oma ruumiandmeid kõikjal Optimeeri välitöö tegevuste efektiivsust asukohapõhise teabega Survey123 Collector Navigator Planeeri
ArcGIS rakendused välitöödeks Raido Valdmaa AlphaGIS Välitöö rakendused kasuta oma ruumiandmeid kõikjal Optimeeri välitöö tegevuste efektiivsust asukohapõhise teabega Survey123 Collector Navigator Planeeri
Andmed arvuti mälus Bitid ja baidid
 Andmed arvuti mälus Bitid ja baidid A bit about bit Bitt, (ingl k bit) on info mõõtmise ühik, tuleb mõistest binary digit nö kahendarv kahe võimaliku väärtusega 0 ja 1. Saab näidata kahte võimalikku olekut
Andmed arvuti mälus Bitid ja baidid A bit about bit Bitt, (ingl k bit) on info mõõtmise ühik, tuleb mõistest binary digit nö kahendarv kahe võimaliku väärtusega 0 ja 1. Saab näidata kahte võimalikku olekut
raamat5_2013.pdf
 Peatükk 5 Prognoosiintervall ja Usaldusintervall 5.1 Prognoosiintervall Unustame hetkeks populatsiooni parameetrite hindamise ja pöördume tagasi üksikvaatluste juurde. On raske ennustada, milline on huvipakkuva
Peatükk 5 Prognoosiintervall ja Usaldusintervall 5.1 Prognoosiintervall Unustame hetkeks populatsiooni parameetrite hindamise ja pöördume tagasi üksikvaatluste juurde. On raske ennustada, milline on huvipakkuva
JABRA STYLE Kasutusjuhend jabra.com/style
 Kasutusjuhend jabra.com/style SISUKORD 1. TERE TULEMAST... 3 2. PEAKOMPLEKT... 4 3. KANDMINE... 5 3.1 KUULARIKATETE VAHETAMINE 4. AKU LAADIMINE... 6 5. ÜHENDAMINE... 7 5.1 BLUETOOTH SEADMEGA ÜHENDAMINE
Kasutusjuhend jabra.com/style SISUKORD 1. TERE TULEMAST... 3 2. PEAKOMPLEKT... 4 3. KANDMINE... 5 3.1 KUULARIKATETE VAHETAMINE 4. AKU LAADIMINE... 6 5. ÜHENDAMINE... 7 5.1 BLUETOOTH SEADMEGA ÜHENDAMINE
Eesti kõrgusmudel
 Meie: 04.06.2002 nr 4-3/3740 Küsimustik Eesti maapinna kõrgusmudeli spetsifikatsioonide selgitamiseks Eestis on juba aastaid tõstatatud küsimus täpse maapinna kõrgusmudeli (edaspidi mudel) koostamisest
Meie: 04.06.2002 nr 4-3/3740 Küsimustik Eesti maapinna kõrgusmudeli spetsifikatsioonide selgitamiseks Eestis on juba aastaid tõstatatud küsimus täpse maapinna kõrgusmudeli (edaspidi mudel) koostamisest
Ülesanne #5: Käik objektile Kooli ümberkujundamist vajava koha analüüs. Ülesanne #5 juhatab sisse teise poole ülesandeid, mille käigus loovad õpilased
 Ülesanne #5: Käik objektile Kooli ümberkujundamist vajava koha analüüs. Ülesanne #5 juhatab sisse teise poole ülesandeid, mille käigus loovad õpilased oma kujunduse ühele kohale koolis. 5.1 Kohavalik Tiimi
Ülesanne #5: Käik objektile Kooli ümberkujundamist vajava koha analüüs. Ülesanne #5 juhatab sisse teise poole ülesandeid, mille käigus loovad õpilased oma kujunduse ühele kohale koolis. 5.1 Kohavalik Tiimi
Microsoft Word - Bose_SoundLink_around-ear_Kasutusjuhend.docx
 Bose SoundLink Around- ear II Kõrvaklapid ETTEVAATUSABINÕUD Pikaajaline vali heli võib kahjustada Teie kõrvakuulmist. Vältige kõrvaklappide kasutamist autoga sõitmise ajal. Kõrvaklappide ohutuimaks kasutamiseks
Bose SoundLink Around- ear II Kõrvaklapid ETTEVAATUSABINÕUD Pikaajaline vali heli võib kahjustada Teie kõrvakuulmist. Vältige kõrvaklappide kasutamist autoga sõitmise ajal. Kõrvaklappide ohutuimaks kasutamiseks
BIM360 ja RealityCapture
 DROONID EHITUSES KAASAEGNE PROJEKTIPANK ja selles Reality Capture töövood 10.06.2019 Ettekanne Hendrik Park MINA linkedin.com/in/hendrik park BIM konsultant 2018 - Tootejuht 2018 - Projekteerimise projektijuht
DROONID EHITUSES KAASAEGNE PROJEKTIPANK ja selles Reality Capture töövood 10.06.2019 Ettekanne Hendrik Park MINA linkedin.com/in/hendrik park BIM konsultant 2018 - Tootejuht 2018 - Projekteerimise projektijuht
Tiia Salm 2011 Online kirjastus CALAMÉO Calameo kujutab endast on-line kirjastust, mis võimaldab oma dokumente avaldada e-raamatuna tasuta. Failid (Pd
 Online kirjastus CALAMÉO Calameo kujutab endast on-line kirjastust, mis võimaldab oma dokumente avaldada e-raamatuna tasuta. Failid (Pdf, Word, Excel, PowerPoint, Open Office) tuleb esmalt keskkonda üles
Online kirjastus CALAMÉO Calameo kujutab endast on-line kirjastust, mis võimaldab oma dokumente avaldada e-raamatuna tasuta. Failid (Pdf, Word, Excel, PowerPoint, Open Office) tuleb esmalt keskkonda üles
Uudiseid k-meride abil bakterite leidmisest [Compatibility Mode]
![Uudiseid k-meride abil bakterite leidmisest [Compatibility Mode]](/thumbs/88/116394963.jpg "Uudiseid k-meride abil bakterite leidmisest [Compatibility Mode]") Uudiseid k-meride abil bakterite leidmisest CLARK: fast and accurate classification of metagenomic and genomic sequences using discriminative k-mers(2015) Rachid Ounit, Steve Wanamaker, Timothy J. Close
Uudiseid k-meride abil bakterite leidmisest CLARK: fast and accurate classification of metagenomic and genomic sequences using discriminative k-mers(2015) Rachid Ounit, Steve Wanamaker, Timothy J. Close
Projekt: Sööbik ja Pisik Tartu Lasteaed Piilupesa Koostajad: Merelle Uusrand ja Ülle Rahv Sihtgrupp: 4 5aastased lapsed Periood: veebruar märts 2017 P
 Projekt: Sööbik ja Pisik Tartu Lasteaed Piilupesa Koostajad: Merelle Uusrand ja Ülle Rahv Sihtgrupp: 4 5aastased lapsed Periood: veebruar märts 2017 Projekti eesmärk 1. Laps saab teadmisi tervislikest
Projekt: Sööbik ja Pisik Tartu Lasteaed Piilupesa Koostajad: Merelle Uusrand ja Ülle Rahv Sihtgrupp: 4 5aastased lapsed Periood: veebruar märts 2017 Projekti eesmärk 1. Laps saab teadmisi tervislikest
Fyysika 8(kodune).indd
.indd") Joonis 3.49. Nõgusläätses tekib esemest näiv kujutis Seega tekitab nõguslääts esemest kujutise, mis on näiv, samapidine, vähendatud. Ülesandeid 1. Kas nõgusläätsega saab seinale Päikese kujutist tekitada?
Joonis 3.49. Nõgusläätses tekib esemest näiv kujutis Seega tekitab nõguslääts esemest kujutise, mis on näiv, samapidine, vähendatud. Ülesandeid 1. Kas nõgusläätsega saab seinale Päikese kujutist tekitada?
Microsoft Word - ref - Romet Piho - Tutorial D.doc
 Tartu Ülikool Andmetöötluskeel "Tutorial D" realisatsiooni "Rel" põhjal Referaat aines Tarkvaratehnika Romet Piho Informaatika 2 Juhendaja Indrek Sander Tartu 2005 Sissejuhatus Tänapäeval on niinimetatud
Tartu Ülikool Andmetöötluskeel "Tutorial D" realisatsiooni "Rel" põhjal Referaat aines Tarkvaratehnika Romet Piho Informaatika 2 Juhendaja Indrek Sander Tartu 2005 Sissejuhatus Tänapäeval on niinimetatud
(Microsoft Word - T\366\366leht m\365isaprogramm algklassilastele tr\374kk 2.doc)
") ALGKLASSILAPSED 1 MINU NIMI ON MINA OLEN PRAEGU TÄNA ON 1. KÄRNERIMAJA JA LILLED KIRJUTA VÕI JOONISTA SIIA KAKS KÄRNERI TÖÖRIISTA KIRJUTA SIIA SELLE TAIME 1. TÖÖRIIST 2. TÖÖRIIST NIMI MIDA ISTUTASID MÕISTA,
ALGKLASSILAPSED 1 MINU NIMI ON MINA OLEN PRAEGU TÄNA ON 1. KÄRNERIMAJA JA LILLED KIRJUTA VÕI JOONISTA SIIA KAKS KÄRNERI TÖÖRIISTA KIRJUTA SIIA SELLE TAIME 1. TÖÖRIIST 2. TÖÖRIIST NIMI MIDA ISTUTASID MÕISTA,
1. Üliõpilased 1.1 Tõendid Vali menüüst: Üliõpilased tõendid tõendite trükkimine. Avaneb vorm Tõendite trükkimine, vali tõendi liik Tõend õppim
 1. Üliõpilased 1.1 Tõendid Vali menüüst: Üliõpilased tõendid tõendite trükkimine. Avaneb vorm Tõendite trükkimine, vali tõendi liik. 1.1.1 Tõend õppimise kohta TLÜ-s Seda tõendiliiki saab väljastada ainult
1. Üliõpilased 1.1 Tõendid Vali menüüst: Üliõpilased tõendid tõendite trükkimine. Avaneb vorm Tõendite trükkimine, vali tõendi liik. 1.1.1 Tõend õppimise kohta TLÜ-s Seda tõendiliiki saab väljastada ainult
IT infrastruktuuri teenused sissejuhatav loeng 00
 IT infrastruktuuri teenused I385 Aine õppejõud: Katrin Loodus, Margus Ernits http://enos./~mernits Tallinn, 2014 Oluline info on aine vikis Kindlasti hoia silma peal aine vikil: https://wiki./ Sealt vali:
IT infrastruktuuri teenused I385 Aine õppejõud: Katrin Loodus, Margus Ernits http://enos./~mernits Tallinn, 2014 Oluline info on aine vikis Kindlasti hoia silma peal aine vikil: https://wiki./ Sealt vali:
 Page 1 of 5 Tehniline Allikas: Pereregistri Kasutusjuhend Sisukord 1 Töö rahvastikuregistri menetlustarkvaraga 1.1 RR menetlustarkvara töökoha riistvara ning andmesideühendus 1.2 Klienditarkvara installeerimisele
Page 1 of 5 Tehniline Allikas: Pereregistri Kasutusjuhend Sisukord 1 Töö rahvastikuregistri menetlustarkvaraga 1.1 RR menetlustarkvara töökoha riistvara ning andmesideühendus 1.2 Klienditarkvara installeerimisele
vv05lah.dvi
 IMO 05 Eesti võistkonna valikvõistlus 3. 4. aprill 005 Lahendused ja vastused Esimene päev 1. Vastus: π. Vaatleme esiteks juhtu, kus ringjooned c 1 ja c asuvad sirgest l samal pool (joonis 1). Olgu O 1
IMO 05 Eesti võistkonna valikvõistlus 3. 4. aprill 005 Lahendused ja vastused Esimene päev 1. Vastus: π. Vaatleme esiteks juhtu, kus ringjooned c 1 ja c asuvad sirgest l samal pool (joonis 1). Olgu O 1
Pealkiri
 Keelelist arengut toetavad FREPY mängud Reili Argus Luksemburgi keelepäev 2015 Taustaks Grammatika omandamisest On rikka ja vaese vormimoodustusega keeli. Mida rikkam vormimoodustus, seda varem hakkab
Keelelist arengut toetavad FREPY mängud Reili Argus Luksemburgi keelepäev 2015 Taustaks Grammatika omandamisest On rikka ja vaese vormimoodustusega keeli. Mida rikkam vormimoodustus, seda varem hakkab
MTAT Loeng 11 ( )
") Reageerimisaeg. Otsingud tekstis, andmebaasis ja multimeedias. Professionaalsed otsingu liidesed. Visualiseerimine (1/37) Reageerimisaeg (2/37) Reageerimisaeg ja selle mõjud Reageerimisaeg Sekundite arv,
Reageerimisaeg. Otsingud tekstis, andmebaasis ja multimeedias. Professionaalsed otsingu liidesed. Visualiseerimine (1/37) Reageerimisaeg (2/37) Reageerimisaeg ja selle mõjud Reageerimisaeg Sekundite arv,
Operatsioonisüsteemi ülesanded
 Praktikum 2 OPERATSIOONISÜSTEEMIDE MASSPAIGALDUS Operatsioonisüsteemide masspaigaldus Suure arvu arvutisüsteemide korral ei ole mõistlik operatsioonisüsteeme paigaldada manuaalselt. Operatsioonisüsteemide
Praktikum 2 OPERATSIOONISÜSTEEMIDE MASSPAIGALDUS Operatsioonisüsteemide masspaigaldus Suure arvu arvutisüsteemide korral ei ole mõistlik operatsioonisüsteeme paigaldada manuaalselt. Operatsioonisüsteemide
efo09v2pke.dvi
 Eesti koolinoorte 56. füüsikaolümpiaad 17. jaanuar 2009. a. Piirkondlik voor. Põhikooli ülesanded 1. (VÄRVITILGAD LAUAL) Ühtlaselt ja sirgjooneliselt liikuva horisontaalse laua kohal on kaks paigalseisvat
Eesti koolinoorte 56. füüsikaolümpiaad 17. jaanuar 2009. a. Piirkondlik voor. Põhikooli ülesanded 1. (VÄRVITILGAD LAUAL) Ühtlaselt ja sirgjooneliselt liikuva horisontaalse laua kohal on kaks paigalseisvat
Microsoft PowerPoint - EMCS13
 EMCS piloot-projekt Raigo Veisberg Maksu- ja Tolliameti kaudsete maksude ja aktsiiside talitus TEEMAD Mis on EMCS EMCS käivitumine EMCS kasutamine ja selle võimalused E-saateleht Info edastamine EMCS infosüsteemi
EMCS piloot-projekt Raigo Veisberg Maksu- ja Tolliameti kaudsete maksude ja aktsiiside talitus TEEMAD Mis on EMCS EMCS käivitumine EMCS kasutamine ja selle võimalused E-saateleht Info edastamine EMCS infosüsteemi
Praks 1
 Biomeetria praks 6 Illustreeritud (mittetäielik) tööjuhend Eeltöö 1. Avage MS Excel is oma kursuse ankeedivastuseid sisaldav andmestik, 2. lisage uus tööleht, nimetage see ümber leheküljeks Praks6 ja 3.
Biomeetria praks 6 Illustreeritud (mittetäielik) tööjuhend Eeltöö 1. Avage MS Excel is oma kursuse ankeedivastuseid sisaldav andmestik, 2. lisage uus tööleht, nimetage see ümber leheküljeks Praks6 ja 3.
Microsoft PowerPoint - Ettekanne_3Dprojekt_ESTGIS.ppt [Compatibility Mode]
![Microsoft PowerPoint - Ettekanne_3Dprojekt_ESTGIS.ppt [Compatibility Mode]](/thumbs/99/141002672.jpg "Microsoft PowerPoint - Ettekanne_3Dprojekt_ESTGIS.ppt [Compatibility Mode]") Tallinna vanalinn - 3D Tallinna Linnaplaneerimise Amet Geoinformaatika osakond Ave Kargaja 21.10.2011 3D projekti eesmärgid Eesti, Tallinna, vanalinna teadvustus Detailsed 3D-andmed Tallinna Ruumiandmete
Tallinna vanalinn - 3D Tallinna Linnaplaneerimise Amet Geoinformaatika osakond Ave Kargaja 21.10.2011 3D projekti eesmärgid Eesti, Tallinna, vanalinna teadvustus Detailsed 3D-andmed Tallinna Ruumiandmete
GRUPI-SMS Veebirakenduse kasutamise juhend Rakendus Elisa grupi-smsi rakendus Väljaandja Elisa Eesti AS Juhendi koostamise kuupäev Versioon
 GRUPI-SMS Veebirakenduse kasutamise juhend Rakendus Elisa grupi-smsi rakendus Väljaandja Elisa Eesti AS Juhendi koostamise kuupäev 05.02.2018 Versiooni kuupäev 30.01.2018 1 SISUKORD 1. ÜLEVAADE... 3 1.1
GRUPI-SMS Veebirakenduse kasutamise juhend Rakendus Elisa grupi-smsi rakendus Väljaandja Elisa Eesti AS Juhendi koostamise kuupäev 05.02.2018 Versiooni kuupäev 30.01.2018 1 SISUKORD 1. ÜLEVAADE... 3 1.1
TARTU ÜLIKOOL LOODUS- JA TÄPPISTEADUSTE VALDKOND ARVUTITEADUSE INSTITUUT Lauri Kongas Turvaauk CVE Referaat aines Andmeturve MTAT Õpp
 TARTU ÜLIKOOL LOODUS- JA TÄPPISTEADUSTE VALDKOND ARVUTITEADUSE INSTITUUT Lauri Kongas Turvaauk CVE-2016-0778 Referaat aines Andmeturve MTAT.03.134 Õppejõud: Meelis Roos Tartu 2016 OpenSSH OpenSSH hõlmab
TARTU ÜLIKOOL LOODUS- JA TÄPPISTEADUSTE VALDKOND ARVUTITEADUSE INSTITUUT Lauri Kongas Turvaauk CVE-2016-0778 Referaat aines Andmeturve MTAT.03.134 Õppejõud: Meelis Roos Tartu 2016 OpenSSH OpenSSH hõlmab
Microsoft Word - HEOS 1 kasutusjuhend EST.docx
 HEOS 1 Seadistamise kiirjuhend http://www.denon.ee/?op=body&id=169 http://www.tophifi.ee/ https://www.facebook.com/tophifi.ee ENNE, KUI ALUSTATE Veenduge, et kõik alljärgnev on töökorras: 1. SAMM: LAHTIPAKKIMINE
HEOS 1 Seadistamise kiirjuhend http://www.denon.ee/?op=body&id=169 http://www.tophifi.ee/ https://www.facebook.com/tophifi.ee ENNE, KUI ALUSTATE Veenduge, et kõik alljärgnev on töökorras: 1. SAMM: LAHTIPAKKIMINE
Statistikatarkvara
 Sissejuhatus statistika erialasse, sissejuhatus matemaatika erialasse, 20. september 2018 Statistikatarkvara põgus ülevaade Krista Fischer Statistikatarkvara kategooriad Võib jagada mitut moodi: Tarkvara,
Sissejuhatus statistika erialasse, sissejuhatus matemaatika erialasse, 20. september 2018 Statistikatarkvara põgus ülevaade Krista Fischer Statistikatarkvara kategooriad Võib jagada mitut moodi: Tarkvara,
Microsoft Word - VOTA_dok_menetlemine_OIS_ doc
 Varasemate õpingute ja töökogemuse arvestamine (VÕTA ) dokumentide menetlemise protsess ÕISis Koostanud: Ele Hansen Ele Mägi Tartu 2012 1. Aine ülekandmine-õppekavajärgne aine Varasemalt sooritatud aine
Varasemate õpingute ja töökogemuse arvestamine (VÕTA ) dokumentide menetlemise protsess ÕISis Koostanud: Ele Hansen Ele Mägi Tartu 2012 1. Aine ülekandmine-õppekavajärgne aine Varasemalt sooritatud aine
SPORTident Air+
 Tarmo Klaar 2012-2013 Esimene koolitus Eestis 2012, Põlvas Ülevaade Uus riistvara Vana tarkvara Proovime kasutada, näited Põhineb hetkel teadaoleval funktsionaalsusel. Tootja ei ole veel lõplikku versiooni
Tarmo Klaar 2012-2013 Esimene koolitus Eestis 2012, Põlvas Ülevaade Uus riistvara Vana tarkvara Proovime kasutada, näited Põhineb hetkel teadaoleval funktsionaalsusel. Tootja ei ole veel lõplikku versiooni
KOTKAS AVE kasutajakeskne juhend Loomise Muutmise kuupäev: kuupäev: Versioon: 2.0 Klient: Keskkonnaministeeriumi Infotehno
 Loomise 22.09.2015 Muutmise 10.10.2018 kuupäev: kuupäev: Versioon: 2.0 Klient: Keskkonnaministeeriumi Infotehnoloogiakeskus Projekt: Keskkonnaotsuste terviklik autonoomne süsteem (KOTKAS) Dokument: AVE
Loomise 22.09.2015 Muutmise 10.10.2018 kuupäev: kuupäev: Versioon: 2.0 Klient: Keskkonnaministeeriumi Infotehnoloogiakeskus Projekt: Keskkonnaotsuste terviklik autonoomne süsteem (KOTKAS) Dokument: AVE
01_loomade tundmaõppimine
 Tunnikava vorm Õppeaine ja -valdkond: Mina ja keskkond Klass, vanuse- või haridusaste: alusharidus Tunni kestvus: 30+15minutit Tunni teema (sh alateemad): Loomade tundmaõppimine, maal elavad loomad Tase:
Tunnikava vorm Õppeaine ja -valdkond: Mina ja keskkond Klass, vanuse- või haridusaste: alusharidus Tunni kestvus: 30+15minutit Tunni teema (sh alateemad): Loomade tundmaõppimine, maal elavad loomad Tase:
Tootmise digitaliseerimine
 Pildi autor: Meelis Lokk Tootmise digitaliseerimise toetus Raimond Tamm, Tartu abilinnapea 20.03.2019 Tootmise digitaliseerimise toetus Eesti on avalike teenuste digitaliseerimise osas Euroopa liider Töötlevas
Pildi autor: Meelis Lokk Tootmise digitaliseerimise toetus Raimond Tamm, Tartu abilinnapea 20.03.2019 Tootmise digitaliseerimise toetus Eesti on avalike teenuste digitaliseerimise osas Euroopa liider Töötlevas
RVT_ DC-Arctic, 1, en_GB
 Kasutusjuhend RVT 64 DC, RVT 354 DC, RVT 54 DC, RVT 684 DC Kasutusjuhend Üldteave Siseseadet saab hõlpsalt kasutada infrapunakaugjuhtimispuldiga. Siseseade annab õigest andmeedastusest teada helisignaaliga.
Kasutusjuhend RVT 64 DC, RVT 354 DC, RVT 54 DC, RVT 684 DC Kasutusjuhend Üldteave Siseseadet saab hõlpsalt kasutada infrapunakaugjuhtimispuldiga. Siseseade annab õigest andmeedastusest teada helisignaaliga.
Kaupmehed ja ehitusmeistrid Selle laiendusega mängimiseks on vajalik Carcassonne põhimäng. Laiendit võib mängus kasutada täielikult või osaliselt ning
 Kaupmehed ja ehitusmeistrid Selle laiendusega mängimiseks on vajalik Carcassonne põhimäng. Laiendit võib mängus kasutada täielikult või osaliselt ning seda saab kombineerida teiste Carcassonne laiendustega.
Kaupmehed ja ehitusmeistrid Selle laiendusega mängimiseks on vajalik Carcassonne põhimäng. Laiendit võib mängus kasutada täielikult või osaliselt ning seda saab kombineerida teiste Carcassonne laiendustega.
E-arvete juhend
 E- arvete seadistamine ja saatmine Omniva kaudu Standard Books 7.2 põhjal Mai 2015 Sisukord Sissejuhatus... 3 Seadistamine... 3 Registreerimine... 4 E- arve konto... 5 Vastuvõtu eelistus... 5 Valik E-
E- arvete seadistamine ja saatmine Omniva kaudu Standard Books 7.2 põhjal Mai 2015 Sisukord Sissejuhatus... 3 Seadistamine... 3 Registreerimine... 4 E- arve konto... 5 Vastuvõtu eelistus... 5 Valik E-
sotsiaalne_tarkvara
 Sotsiaalne tarkvara ja avatud sisu e-kursusel Hans Põldoja Tallinna Lilleküla Gümnaasium / UIAH Media Lab Millest juttu tuleb? Mis on sotsiaalne tarkvara? Jalutuskäik erinevates sotsiaalse tarkvara keskkondades
Sotsiaalne tarkvara ja avatud sisu e-kursusel Hans Põldoja Tallinna Lilleküla Gümnaasium / UIAH Media Lab Millest juttu tuleb? Mis on sotsiaalne tarkvara? Jalutuskäik erinevates sotsiaalse tarkvara keskkondades