Sülearvuti toiteseade
|
|
|
- Mihkel Ernits
- 3 aastad tagasi
- Vaatused:
Väljavõte
1 INFOTEHNOLOOGIA TEADUSKOND Thomas Johann Seebecki elektroonikainstituut Aleksander Liin Sülearvuti toiteseade Bakalaureusetöö Juhendaja: Mihhail Pikkov Tallinn 2015
2 Autorideklaratsioon Olen koostanud antud töö iseseisvalt. Kõik töö koostamisel kasutatud teiste autorite tööd, olulised seisukohad, kirjandusallikatest ja mujalt pärinevad andmed on viidatud. Käesolevat tööd ei ole varem esitatud kaitsmisele kusagil mujal. Autor: Aleksander Liin Kuupäev: Allkiri: 2
3 Annotatsioon Bakalaureuse lõputööks on pinget tõstev muundur sülearvuti toiteks autonoomsest pliiakust või auto elektrisüsteemist. Töö sisaldab pinget tõstva muunduri tööpõhimõtte kirjeldust, elektriskeemi, arvutusi, skeemi simulatsiooni ja trükiplaadi disaini. Põhiliseks eesmärgiks oli pinget tõstva muunduri tööpõhimõtte uurimine, kasutades enamasti teoreetilist informatsiooni, arvutusi ja simulatsioone. Tehtud arvutuste põhjal töötati välja pidevas voolu juhtimise režiimis töötav ja integraallülitusel LM3478 baseeruv pinget tõstev muundur sülearvuti toiteks. Väljatöötatud skeemile teostati simulatsioonid ja disainiti trükkplaat prototüübi ehitamise tarbeks. Lõputöö on kirjutatud eesti keeles ning sisaldab teksti 53 leheküljel, 17 joonist ja 5 tabelit. 3
4 Abstract This bachelor s thesis is about designing an autonomous electrical power converter for powering a laptop from a conventional lead-acid battery or from a car s electrical system. The power supply is based on a continious conduction mode boost-converter which is controlled by a switching regulator controller LM3478 made by Texas Instruments. The thesis contains theoretical information about the operating principals of a continious conduction mode boost-converter, calculations and simulations. Based on the calculations, a continious conduction mode boost-converter was designed and simulated. A printed circuit board layout was designed for a calculated boost converter prototype. The thesis is in Estonian and contains 53 pages of text, 17 figures and 5 tables. 4
5 Sisukord Sissejuhatus Lühiülevaade sülearvuti toite probleemist Sarnaste seadmete ja lahenduste ülevaade Ülesandepüstitus ja tehnilise lahenduse valik Struktuurskeemi väljatöötamine Pinget tõstva muunduri tööpõhimõte Pooljuhtkomponentide valiku kriteeriumid Pulsilaiusmodulatsioon ja tagasiside Toiteseadme skeem ja skeemi komponentide valik Drosseli induktiivsuse määramine Väljundpinge silufiltri mahtuvuse ja -pulsatsiooni määramine Jõudioodi valik. Hajuvõimsuse määramine Jõutransistori tüübi valik. Parameetrite ja hajuvõimsuse määramine Väljundpinge, tagasiside ja sageduse määramine Sisendkondensaatorite valik ja akulaetavuse kontrollahel Toiteseadme kasuteguri hindamine Toiteseadme elektriskeemi simulatsioon Elektriskeemi simulatsioonide tulemused Trükkplaadi disain Jahutustingimuste kontroll Majanduslik kalkulatsioon...41 Kokkuvõte...42 Kirjandus
6 Sissejuhatus Teema valikul osutus määravaks autori huvi impulss-toiteseadmete vallas. Elektroonika seadme vältimatu osa on toiteplokk ja nõudmised üha väiksemate ja efektiivsemate toiteseadmete järele suurenevad üha kasvavas tempos. Arvutustehnika on saanud inimeste igapäevaseks tööriistaks ja tänu elektroonika kiirele arengule on pea igal tööealisel inimesel sülearvuti, mida on hõlbus endaga kaasas kanda, mis omakorda on loonud vajaduse ka paremate akude ja mobiilsemate laadijate järele. Välitöödel on tihti tarvis kasutada arvutit, kas ehitusega seotud projektide täpsustamiseks või mõnel muul otstarbel. Samas ei pruugi alati olla kohapeal elektrivarustust või on see liiga kaugel. Sülearvuti akud peavad uuena vastu mõned tunnid ja võivad töömaale jõudes olla tühjenenud. Seetõttu on tarvis projekteerida vooluvõrgust mittesõltuv sülearvuti laadija, mille abil on võimalik arvuti akut laadida, kas autonoomsest pliiakust või auto elektrisüsteemist. Projekteeritud laadija peab olema kõrge kasuteguriga ja väikeste mõõtmetega. Veendumaks, et väljatöötatud skeem on töövõimeline, tuleb skeemi simuleerida ning lõpuks välja töötada trükkplaat prototüübi tarbeks, mille abil laadija kokku panna ja väljatöötatud skeemi katsetada. Nende ülesannete lahendamiseks ongi käesolev töö pühendatud. Töö koosatmiseks on kasutatud Tallinna Tehnikaülikooli raamatukogust saadavat tehnilist kirjandust, erinevate elektroonika komponente tootvate firmade andme- ja rakenduslehti, internetis leitavaid tehnilisi- ja teaduslikke artikleid, millede loetelu on toodud kirjanduse loetelus. Lisaks on kasutatud ka autori enda poolt koostatud loengukonspekte, mida eraldi töös viidatud ei ole. 6
7 1.Lühiülevaade sülearvuti toite probleemist Sülearvuti energiatarve sõltub paljudest erinevatest teguritest nagu näiteks ekraani suurusest, protsessori töökoormusest ja taktsagedusest, kõvaketta tüübist ja kirjutamis/lugemisaktiivsusest, sisend-väljund seadmete kasutamisest (nt. CD-plaadilt helisalvestiste kuulamine), aku laetuse tasemest ja paljudest muudest teguritest. Oma rolli mängib ka operatsioonisüsteemi ja riistvara õige juhtprogrammi olemasolu, sest vastasel korral ei pruugi operatsioonisüsteem kõiki riistvara energia kokkuhoiu võimalusi ära kasutada. [1] Kaasaegsete sülearvutite energiatarve arvuti kasutamisel jääb vahemikku ca 20 kuni 70W [2], sõltuvalt arvuti tootjast ja töö koormusest, kusjuures toite pinge on tavaliselt vahemikkus 17 V kuni 20 V. Peamised nõuded sülearvuti toiteseadmele: 1) Väikesed mõõtmed ja kaal 2) Kõrge kasutegur 3) Elektromagneetiline ühilduvus Käesoleva bakalaureuse töö eesmärk on välja töötada sülearvuti laadija, mida on võimalik toita autonoomsest pliiakust või auto elektrisüsteemist. Laadija peab vastama ülal toodud nõuetele. 1.1 Sarnaste seadmete ja lahenduste ülevaade Peatükis käsitletakse lahendust sülearvuti toiteks autonoomsest pliiakust või auto elektrisüsteemist. Lisaks on kirjeldatud pinget tõstvat muundurit pliiaku laadija näitel. 7
8 1. Inverteriga lahendus Joonis 1.1 Inverteriga lahendus Kõige lihtsam lahendus sülearvuti laadimiseks autonoomsest pliiakust või auto elektrisüsteemist on toodud joonisel 1.1. Toiteallikaks võib olla nii pliiaku, kui ka auto elektrisüsteem. Toiteallika 12 V väljundpinge muundatakse inverteri abil 220 V vahelduvpingeks, millega toidetakse sülearvuti originaallaadijat. Invertereid on elektroonika poodides suur valik paljude tootjate poolt. Eelised: 1) Lihtne lahendus, kuna kasutatakse juba valmis tooteid. 2) Universaalne inverterit võib kasutada ka teiste seadmete toiteks. 3) Sülearvuti ja toiteallikas on galvaaniliselt eraldatud. Puudused: 1) Madal kasutegur, kuna pinget muundatakse vähemalt kaks korda. 2) Niisketes keskkondades ja välitingimustes vajab suuremat kaitse astet, et vähendada elektrilöögi ohtu. 3) Kõrge hind. 8
9 2.Pliiaku laadija Joonis 1.2 Pliiaku laadija Joonisel 1.2 on toodud pliiaku laadija toitepingel 5-16 V. Laadija kasutab flyback tüüpi skeemi. Skeemi põhikomponentideks on trafo T1, juhtahel IC1, voolu mõõtmise integraallülitus IC2 ja transistor Q1. Trafo T1 keerdude suhe on 1:1. Trafo peamine eesmärk on sisend lahti sidestada väljundist. IC2 mõõdab aku laadimisvoolu ja kui laadimisvool on langenud piisavalt madalale, lülitab IC1 väljundi LBO madalale nivoole ja transistori Q2 abil muudetakse tagasiside pingeväärtust IC1 jalal FB. Selle tulemusena väheneb väljundpinge. Eelised: 1) Toiteallikas ja aku on lahtisidestatud 2) Mitmeastmeline tagasisideahel Puudused: 1) Madal väljundvõimsus 2) Trafo kasutamine lisab seadmele hinda 9
10 1.2 Ülesandepüstitus ja tehnilise lahenduse valik Antud töö ülesanne on välja töötada pinget tõstev muundur (PTM), mis suudaks toita sülearvutit välise 12,6 V pingega aku toitel või auto elektrisüsteemist. PTM i lähteandmed on toodud tabelis 1.2. Parameeter Väärtus Selgitus Vin Min 11 V Minimaalne sisendpinge Vin 14 V nominaalne sisendpinge VOut 19V Väljundpinge Iout 4A Maksimaalne väljundvool POut 76 W Maksimaalne väljundvõimsus ηmin 95% Minimaalne seadme kasutegur Δvc max 200 mv Maksimaalne väljundpinge pulsatsioon Tabel 1.1 PTM lähteandmed Tabelis 1.2 toodud parameetrid sisestati Texas Instruments i veebirakendusse Webench ja programmi poolt välja pakutud lahenduste hulgast valiti välja ilma trafota pinget tõstva muunduri topoloogia. Valitud skeem kasutab energiasalvestina drosselit ja kondensaatorit. Tehnilise lahenduse valikul osutusid määravaks ka madal hind ning valmis seadme väikesed gabariitmõõtmed ja kaal. Kuna toiteallikana võib kasutada ka autonoomset pliiakut, siis lisati skeemile sisendpinge kontrollahel, mis annab seadme kasutajale valgusindikatsiooniga märku aku liigsest tühjenemisest. 10
11 2. Struktuurskeemi väljatöötamine Struktuurskeemi ülesanne on näidata, millistest osadest PTM koosneb ja kuidas osad omavahel seotud on. Struktuurskeem annab ülevaate PTM i põhiosadest jäädes samal ajal võimalikult lihtsaks. Seetõttu pole struktuurskeemis välja toodud kõiki lõplikus skeemis kasutatud elektroonikakomponente. Lisaks on struktuurskeemil näidatud toiteallikas ja koormus, mis lihtsustab skeemist arusaamist, kuid pole PTM i osa. PTM i struktuurskeem on toodud joonisel 2.1 Joonis 2.1 PTM struktuurskeem PTM i põhilisteks osadeks on drossel L, lüliti Qs, diood D, väljundpinge silufilter C, tagasiside- ja juhtahel ning sisendpinge kontrollahel. Kui lüliti Qs on sisse lülitatud, langeb drosselile L pinge, mis on peaaegu võrdne toiteallika pingega. Drosselit hakkab läbima vool, mille tulemusena salvestub drosselisse energia. Ajal mil drosselisse L laetakse energiat, on diood D suletud ja koormust toidetakse väljundpinge silufiltrisse C salvestunud energia arvelt. Väljundpinge silufilter C töötab nii energia salvestuselemendina kui ka väljundpinge silufiltrina. Kui drosselisse L on salvestatud piisav hulk energiat, suletakse lüliti Qs. Drossel üritab takistada teda läbiva voolu muutumist ja indutseerib oma klemmidele elektromotoorjõu, mille pinge on toiteallika suhtes vastupidine. Kui drosselile indutseeritud pinge ja toiteallika pinge summa on suurem kui pinge väljundpinge silufiltri C klemmidel, siis diood D avaneb ning koormust toidavad toiteallikas ja drossel L. Lisaks laetakse väljundpinge silufiltrisse C tagasi eelmise tsükli ajal tarbitud energia. Tagasiside- ja 11
12 juhtahel tüürib lülitit Qs ja seeläbi hoides väljundpinge väärtust konstantsena. Tagasiside- ja juhtahel mõõdab ka lülitit Qs ja drosselit L läbivat voolu ja ei lase voolul kasvada üle etteantud väärtuse. Sisendpinge kontrollahel mõõdab toiteallika pinget ja annab kasutajale märku, kui pinge on langenud väiksemaks kui 11 volti. 2.1 Pinget tõstva muunduri tööpõhimõte PTM on alalispingel töötav seade, mille väljundpinge on kõrgem kui sisendpinge. Sellised toiteseadmed leiavad rakendust olukordades, kus elektroonika seadet on vaja toita kas akupatareidest, päikesepaneelidest või mõnest muust madala pingelise väljundiga energia allikast. Joonis 2.2 PTM põhimõtteline skeem Joonisel 2.2 on toodud PTM põhimõtteline skeem [5]. Lülitus koosneb drosselist L, lülitustransistorist Qs, kiiretoimelisest Schottky dioodist Dfw, silukondensaatorist C, toiteallikast Vs ja koormusest Load. Sellistele muunduritele on omane, et kasutatakse ära mitmete energiat salvestavate komponentide (drossel ja kondensaator) omadusi. Drossel ja kondensaator peavad olema ühendatud selliselt, et moodustuks madalpääsfilter, mis aitab tagada madala väljundpinge pulsatsiooni [5]. PTM võib töötada nii pideva voolu-juhtimise režiimis (ing.keeles continious conduction mode) kui ka katkendliku voolu-juhtimise režiimis (ing.keeles discontinious conduction mode). Mõlema režiimi puhul ja konstantsel koormusel püsiva süsteemi korral peab drosselit läbiv vool saavutama peale lülitustsüklit sama väärtuse, mis lülitustsükli alguses. Vastasel korral toimuks voolu kuhjumine või sumbumine, mis viiks süsteemi tasakaalust välja [4]. Pideva voolu juhtimise režiimis läbib drosselit pidevalt vool. See tähendab, et 12
13 lülitustsükli lõpus langeb drosselit läbiv vool mingile kindlale tasemele ja tsükkel kordub. Katkendliku voolu juhtimise režiimis saavutab iga lülitustsükli lõpus drosselit läbiv vool väärtuse 0. Joonisel 2.3[5] on toodud pideva voolu juhtimise režiimis töötava PTM i lülitusdiagrammid, mis iseloomustavad skeemi komponente läbivate voolude ja pingete väärtuseid erinevatel ajahetkedel. Joonis 2.3 PTM i lülitusdiagrammid 13
14 Kus: Va on PTM i väljundpinge [V], VQS on lülitustransistori Qs kollektor-emitter pinge [V], Is on PTM i sisendvool [A], IL on drosselit L läbiv vool [A], Idfw on dioodi D läbiv vool [A], VC on väljundkondensaatori pinge [V], Ia on koormust läbiv vool [A], D on transistori Qs juhtsignaali täitetegur, T on transistori Qs juhtsignaali periood [s]. 1.Töö pideva voolu juhtimise reziimis. Ajahetkel t=0 s avaneb transistor Qs ja vool IL läbi drosseli L hakkab lineaarselt kasvama väärtuselt I1 väärtuseni I2, kusjuures drosselit L läbiva voolu keskväärtus on võrdne toiteallikast tarbitava voolu keskväärtusega. Diood D on vastupingestatud ja teda läbiv vool Idfw = 0 A. Koormust Load toidab väljundkondensaator C, mis peab olema valitud piisavalt suure mahtuvusega, et tagada väljundvool Ia ning samal ajal säilitama nõutud väljundpinge pulsatsiooni kriteeriumid. Väljunpinge pulsatsiooni saab leida valemiga 2.1[5]. I D (2.1) Δ V c= a f sc Kus: fs on lülitustsükli sagedus [Hz], C on väljundkondensaatori mahtuvus [F], D on täitetegur. Aja hetkel t = DT transistor Q s sulgub ja vool läbi drosseli L hakkab langema. Drossel indutseerib oma klemmidele elektromotoorjõu, mille polaarsus on vastupidine võrreldes toiteallika pingega. Toiteallika ja drosselil indutseeritud pinge summa on kõrgem kui väljundpinge Va, mille tulemusena on diood päripingestatud ja teda hakkab läbima vool Idfw. Koormust toidetakse läbi dioodi sisendpinge allikast Vs ja drosselisse salvestunud energia arvelt, samal ajal laetakse väljundkondensaatorisse tagasi energia, mis eelmise tsükli ajal ära tarbiti. Drosseli vool langeb kuni transistor Q s avaneb ja kogu tsükkel kordub uuesti. Täiteteguri D, mis iseloomustab, kui pikalt transistor Q s lülitustsükli perioodi T jooksul on avatud, saame leida valemi 2.2 abil. 14
15 D= t on T (2.2) Kus: ton on aeg mille jooksul transistor Qs on avatud [s], T on lülitustsükli periood [s]. Valem 2.3[5] iseloomustab väljundpinge Va sõltuvust sisendpingest Vs ja täitetegurist D. Vs (2.3) V a= (1 D) Väljundpinge Va on pöördvõrdelises sõltuvuses (1-D ) suhtes. Siit järeldub, et täitetegur D ei saa olla 1, sest sellisel juhul energia ülekannet sisendist väljundisse ei toimuks. Pidevas voolu-juhtimise režiimis töötava PTM i drosselit läbib kogu seadme töö vältel vool, mis sõltuvalt lüliti olekust Qs kasvab või kahaneb väärtuste I1 ja I2 vahel. Seega läbib drosselit pulseeriv vool mille saab leida valemi 2.4 [5] abil. V D Δ I= S (2.4) f sl Kus: ΔI on drosseli voolu pulsatsioon [A]. 2. Töö katkendlikus voolujuhtimise režiimis. Kui drosselit L läbiv vool langeb nullini enne, kui algab uus töötsükkel, siis töötab PTM katkendlikus voolujuhtimise režiimis. Sellisel juhul kasutab koormus ära kogu energia, mis lülitustsükli jooksul drosselisse L laeti. Drosselit L läbiv vool muutub perioodiliselt väärtuselt 0 väärtuseni IL. PTM töötab katkendlikus voolujuhtimise režiimis, kui on täidetud kriitilise induktiivsuse või kriitilise koormustakistuse nõue L<LC või R > RC. Kriitiline induktiivsus, mille korral PTM töötab katkendlikus voolujuhtimise režiimis, on leitav valemi 2.5 [5] abil. LC = RD(1 D)2 (2.5) 2f s Kus: LC on drosseli L induktiivsus, mile korral PTM töötab katkendlikus voolujuhtimise režiimis [H], R on koormus takistus [Ω]. 15
16 Kriitiline koormustakistus, mille korral PTM töötab katkendlikus voolujuhtimise režiimis on leitav valemiga 2.6 [5]. RC = 2 fsl D (1 D)2 (2.6) Kus: RC on kriitiline koormustakistus, mille korral PTM töötab katkendlikus vooljuhtimise režiimis [Ω]. Ülaltoodust järeldub, et üleminek pidevast režiimist katkendlikku režiimi sõltub koormustakistusest, sagedusest, drosseli L induktiivsusest ja täitetegurist D. Seega saab pidevas voolujuhtimise režiimis töötav PTM minna üle katkendliku voolu juhtimise režiimi, kui on täidetud nõue R > RC. 16
17 2.2 Pooljuhtkomponentide valiku kriteeriumid Pooljuhtseadmete kiire areng on loonud võimaluse välja töötada üha kõrgematel sagedustel töötavaid toiteseadmeid. Lülitustransistorid on muutumas üha väiksemaks gabariitidelt ja kaalult, samal ajal taludes üha suuremaid kollektor-emitter pingeid ja kollektori voolusid Samas on lülitustransistorid endiselt ühed õrnemad impulsstoiteploki komponendid. Hästi valitud transistor tagab toiteploki töökindluse ja kõrge kasuteguri. Impulss-toiteseadmetes leiavad enam kasutust MOSFET transistorid tänu oma kiiretoimelisusele ja madalamate kadudele tüürimisahelas. Ka jõudioodi valikul on määravaks kriteeriumiks madalad kaod ja kiiretoimelisus. 1.Lülitustransistori valiku kriteeriumid Nagu eelpool kirjeldatud, leiavad impulss-toiteseadmetes enam kasutamist MOSFET väljatransistorid. MOSFET väljatransistorid on pingega tüüritavad lülituselemendid, mis on bipolaarsetest transistoridest kümneid kordi kiiremad [3]. Transistoril hajub kuni pool PTM i kadudest, seega on oluline valida võimalikult väikeste kadudega transistor. MOSFET transistoril tekkivad kaod saab lihtsustatult jagada juhtivuskadudeks ja lülituskaduseks. Juhtivuskaod on otseselt sõltuvad staatilisest neelu-lätte takistusest Rds on ja neeluvoolust. Seetõttu on oluline valida väikese Rds on parameeteriga transistor. Lülituskaod sõltuvad transistori arhitektuurist ja töörežiimist tingitud parasiitsetest mahtuvustest ja tekivad momendil, mil transistor lülitub avatud olekust suletud olekusse ja vastupidi. Seega sõltuvad lülituskaod eelkõige transistori sulgemis- ja avanemisviivitusest ja lülitussagedusest. Kolmas kadu tekib paisu-lätte mahtuvusest, mille laengust sõltuvad kaod tüürahelas. Paisu-lätte mahtuvuse laadimise ja tühjaks laadimise kao suurus sõltub eelkõige paisu-lätte laengu hulgast, töösagedusest ja tüürimispingest. Kõik kolm kirjeldatud kadu on eelkõige seotud transistori arhitektuurist tulenevate iseärasustega. Mida väiksem on neelu-lätte staatiline takistus, seda suurem on transistori neelu ala ristlõige. Mida suurem on neelu ristlõige, seda suuremad on ka paisu elektroodi pindala ja sellest tingitult ka laeng mida paisuala mahutab. Seega tuleb lülitustransistori valikul leida kompromiss ja valida transistor, mille korral kõik kolm kadu oleksid võimalikult väikesed. 17
18 2.Jõudioodi valiku kriteeriumid Jõudioodil on oluline roll PTM is, sest läbi dioodi toimub drosselisse salvestunud energia ülekandmine koormusele. Jõudioodil võib hajuda rohkem kui pool PTM i kadudest. Jõudioodi valimisel tuleks lähtuda järgmistest parameetritest : 1. Päri-pingelang Vf - Pingelang, mis jääb dioodile, kui diood on päripingestatud ja teda läbib vool. Mida madalam on päripingelang, seda väiksemad on kaod dioodis. 2. Vastu-takistuse taastumiskestus Trr - Aeg, mis kulub dioodil väljalülitumiseks, kui ta pole enam päripingestatud. 4. Maksimaalne lubatud vastupinge V r - Vastupinge, mida diood suudab taluda ilma, et toimuks läbilöök. Dioodide võrdlemiseks on sobilik tabel 2.1 kus on võrreldud ülaltoodud parameetreid erineva tehnoloogiaga toodetud jõudioodide korral [3]. Parameeter Päripinge, Vf Schottky Ülikiiretoime- Kiiretoimelised Standard dioodid lised dioodid dioodid dioodid 0,5-0,6 V 0,9-1,0 V 1,2 1,4 1,2 1, ns V 150 ns V 1 μs V Taastumiskestus, Trr <10 ns Suurim lubatud V vastupinge, Vr Tabel 2.1 Erinevate tehnoloogiatega toodetud jõudioodide võrdlus. Tabelist 2.1 selgub, et Schottky dioodide kõrge kiiretoimelisus ja madal päri-pingelang teeb neist parima valiku madalapingelistes impulss-toiteplokkides. Kui aga dioodile rakenduva vastupinge väärtus läheb suuremaks kui 100 V, tuleb kasutada suurema päripingelanguga ja aeglasema taastumiskestusega dioode. Dioodi läbib vool, mille keskväärtus on võrdne koormusvoolu keskväärtusega, kusjuures dioodi läbiv voolutugevuse amplituud on leitav valemiga 2.7 [5]. I d ( peak )= I out Δ IL + (2.7) (1 D) 2 Dioodil hajuv võimsus on leitav valemiga 2.8 [5]. P D =V f I Dfw (2.8) 18

19 2.3 Pulsilaiusmodulatsioon ja tagasiside Impulss-toiteplokkide juhtimiseks kasutatakse enamikel juhtudel pulsilaius- modulaatorit, mis muudab transistori sisselülitamise kestust vastavalt väljundpinge muutustele. Pulsilaiusmodulatsiooni korral hoitakse pulsside sagedus konstantsena ja muudetakse pulsi kestust perioodi jooksul. Pulsilaiusmodulaator (PLM) juhib kogu PTM i tööd ja tagab soovitud väljundpinge ka koormuse või sisendpinge muutumise korral. Väljundpinge hoitakse soovitud piirides muutes täitetegurit D. Pulsilaiusmodulaatoriga määratakse ka PTM i töösagedus. Pulsilaiusmodulaatorid on tavaliselt ehitatud integraallülitusena. Tagasiside võib olla teostatud ühe- või mitmeastmeliselt. Üheastmelise tagasiside korral sõltub täitetegur D tavaliselt väljundpingest. Joonis 2.4 PLM lihtsustatud skeem. Joonisel 2.4 on toodud PLM i lihtsustatud skeem [12], mis koosneb komparaatorist Fm, saehambakujulise signaali generaatorist Vramp, veasignaali allikast Vc ja toiteseadmest Vcc. Veasignaali suurus iseloomustab, kui palju erineb reaalne väljundpinge soovitud väljundpingest. Lülitustsükli alguses lülitub PLM i väljund d kõrgele nivoole ja Vramp hakkab kasvama. Kui Vramp = Vc, siis lülitub komparaatori väljund madalale nivoole. Joonisel 2.4 toodud diagrammidelt on näha, et mida suurem on veasignaal Vc, seda pikem on pulsi kestus. Seega sõltub täitetegur D veasignaali Vc suurusest. 19
20 Joonisel 2.5 on toodud forward-tüüpi muunduri lihtsustatud skeem ja pingete diagrammid [12]. Skeemis on kasutatud PLM i, mis on haaratud kaheastmelise tagasisidega. Joonis 2.5 Forward-tüüpi muunduri lihtsustatud skeem ja pingete diagrammid Skeem koosneb veasignaali võimendist (Error amp), komparaatorist (PWM comp), clock-signaali generaatorist (Clock), RS-trigerist, transistorist, trafost, takistist Rsense, kahest dioodist, drosselist ja silukondensaatorist. Väljundpinget võrreldakse tugipingega ja tekitatakse veasignaalivõimendi abil veasignaal Ve. Clock signaal seab RS-trigeri väljundi kõrgele nivoole ja transistor avaneb. Trafo primaarmähist, transistori ja takistit Rsense hakkab läbima vool, mille tulemusena kasvab pinge Vs. Komparaator võrdleb veasignaali Ve ja pinget Vs. Kui Ve=Vs, lülitub komparaatori väljund kõrgele nivoole, mis seab RS-trigeri väljundi madalale nivoole ja transistor sulgub. Seega sõltub täitetegur D väljundpingest ja trafo primaarmähist läbivast voolust. Kaheastmelise tagasisidega haaratud muundur reageerib koormuse muutumisele kiiremini, sest väljundpinge muutumise korral piirab või kasvatab PLM trafo primaarmähist läbivat voolu juba järgmise lülitustsükli jooksul. 20
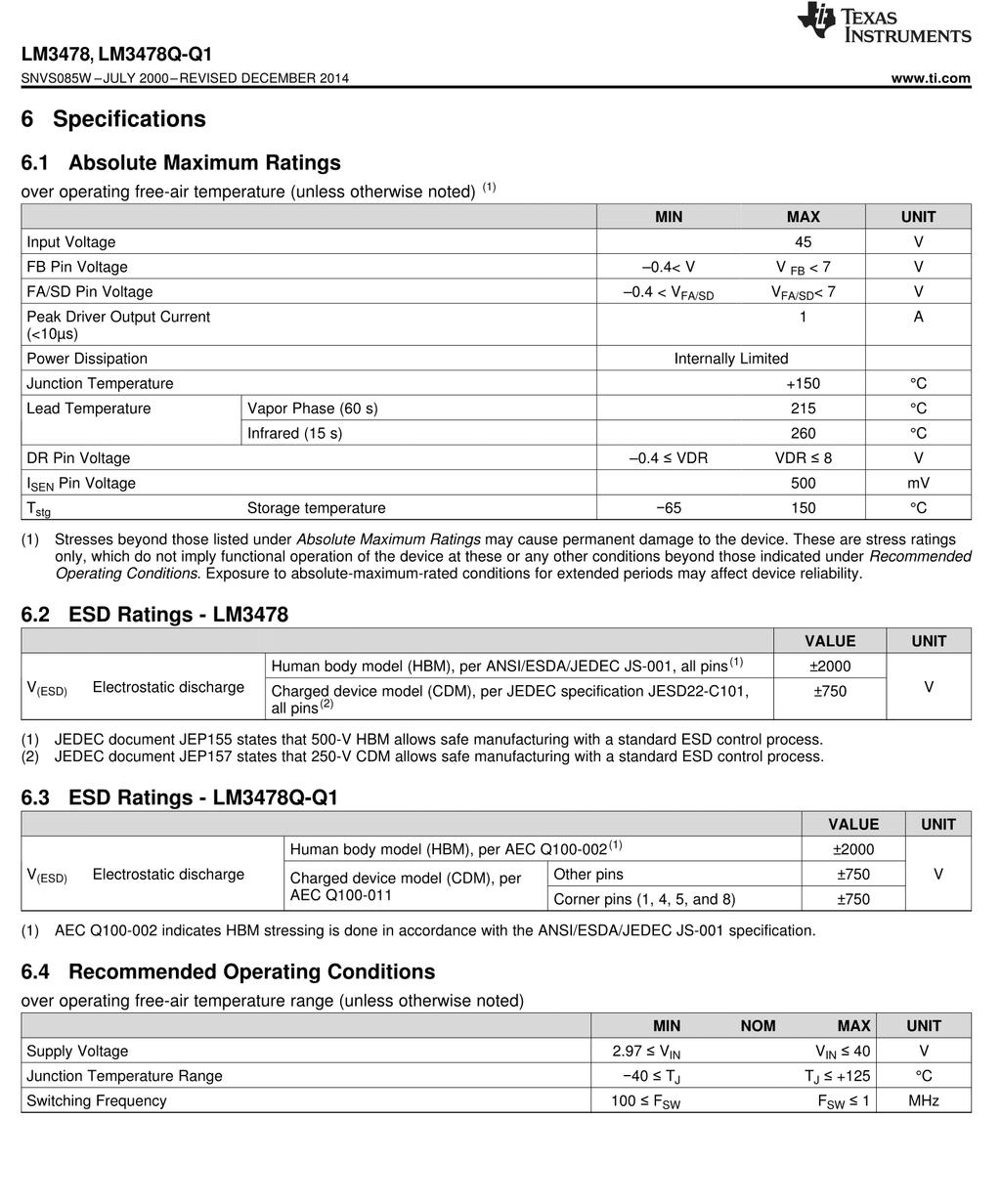
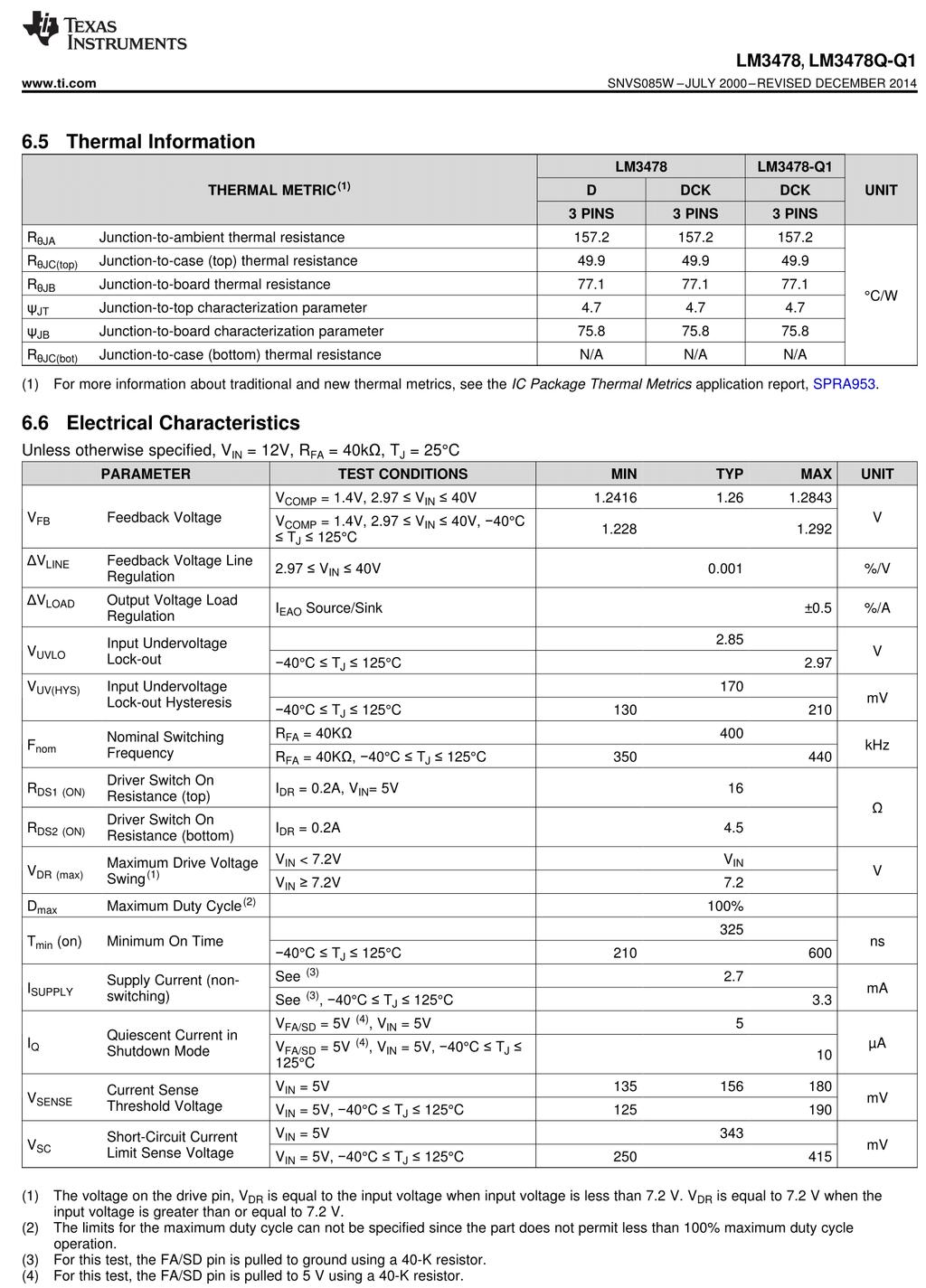
21 3. Toiteseadme skeem ja skeemi komponentide valik Tabelis 1.1 toodud andmed sisestati Texas Instruments i veebilehe rakendusse Webench ( ja valiti veebirakenduse poolt pakutud skeemide hulgast Texas Instruments i integraallülitusel LM3478 baseeruv skeem. PTM i töö sageduseks määrati 250 khz. PTM i täielik elektriskeem on esitatud joonisel 3.1. Skeemile lisati sisendpinge kontrollahel, mis koosneb takistitest R7 ja R8, kahest stabilitronist VD2 ja VD3 ning valgusdioodist Led1. Kontrollahel on koostatud selliselt, et kui aku pinge langeb madalamale kui 11 volti, süttib valgusdiood LED1, mis annab kasutajale märku aku tühjenemisest. Veel lisati andmelehe [7] soovitusel LM3478 mikroskeemi toite ahelasse madalpääs-filter, mis koosneb kondensaatorist C4 ja takistist R 1. Joonis 3.1 PTM i täielik elektriskeem Lüliti Qs (joonis 2.1) eesmärki täidavad MOSFET transistor M1, takistid R 9, R6 ja kondensaator C5. Takistile R9 langeva pinge abil mõõdetakse transistori M1 läbivat voolu. 21
22 Ahel R6 ja C5 moodustavad madalpääsfiltri, mis summutab kõrgesageduslikud mürad LM3478 Isen sisendis. Drosseli L ja dioodi D ( joonis 2.1) rolli täidavad joonisel 3.1 toodud skeemis drossel L1 ja Schottky dioodi VD1. Kondensaatorid C6 ja C7 moodustavad väljundpinge silufiltri C (joonis 2.1), mis tagab madala väljundpinge pulsatsiooni ja väljundvoolu ajal, mil transistor M1 on suletud. Kondensaator C1 vähendab sisendpinge pulsatsiooni. PTM on haaratud tagasisidega nii väljundpinge kui ka drosselit L 1 läbiva voolu järgi. Takistid R3 ja R4 moodustavad pingejaguri, mille abil mikroskeem U1 võrdleb väljundpinget sisemise tugipinge allikaga. Mikroskeem U1 hoiab väljundpinget soovitud piirides muutes täitetegurit D ja seeläbi transistori M1 avatud oleku aega. Ahel C2, C3, R2 moodustab välise kompensatsiooniahela, mis lisab PTM ile püsivust ja suurendab stabiilsust koormuse kiire muutumise korral. Kompensatsiooniahela komponendid valiti integraallülituse LM3478 tootja Texas Instruments i veebirakenduse Webench abiga, mis arvutas ahela komponentide väärtused. Mikroskeemi LM3478 tähtsamad parameetrid on toodud lisas 1 ja plokkskeem on toodud lisas Drosseli induktiivsuse määramine Drossel peab olema valitud selliselt, et tagada PTM i töö pidavas voolujuhtimise režiimis. Esmalt arvutame drosseli voolu pulsatsiooni. Tavaliselt valitakse drosseli voolu pulsatsiooni väärtuseks % väljundvoolust [6]. Drosseli voolu pulsatsiooni saab arvutada valemiga 3.1[6]. Δ I L =0,3 I out V out 0,3 4A 19V = 2,1 A (3.1) V in. 11V Kus: ΔIL on drosseli voolu pulsatsioon [A], Iout on PTM i maksimaalne väljundvool [A], Vout on PTM i väljunpinge [V], Vin on PTM i minimaalne sisendpinge [V]. Vajalik drosseli induktiivsus L on leitav valemiga 3.2 [6]. L= V in.( V out V in.) 11V (19V 11V) = 8,8μ H (3.2) Δ I L f s V out 2,1 A 250kHz 19V Kus: fs on PTM i töösagedus [khz]. 22
23 Kontrollime, et PTM töötaks pidava voolujuhtimise režiimis. Selleks leiame esmalt valemi 3.3 [6] abil täiteteguri D ja võrratuse 3.4 [6] abil minimaalse drosseli induktiivsuse, mille juures PTM töötab pideva voolujuhtimise režiimis. D=1 L> V in. η 11V 0,95 = =0,45 (3.3) V out 19V D(1 D) V in. 0,45 (1 0,45) 11V = 1,4μ H (3.4) 2 I out f s 2 4A 250kHz Drosseli valikul on oluline, et drosseli maksimaalne lubatud vool ei oleks ületatud. Drosselit läbiva voolu amplituudväärtuse saab arvutada valemi 3.5 [6] abil. I Lmax =I s + ΔIL I ΔIL 4A 2,1 A = out + = + 8,32 A (3.5) 2 1 D 2 1 0,45 2 Kus: Ilmax on drosselit läbiva voolu amplituudväärtus [A], Is on PTM i sisendvool [A]. Tehtud arvutuste põhjal võime valida elektroonikakomponentide müügifirma Farnell veebikataloogi abil [9] firma Bourns drosseli PM K-RC, mille nominaal-induktiivsus on 10 μh ja lubatud maksimaalne voolutugevus on 11,7 A. Drosseli aktiivtakistus on 7 mω. 3.2 Väljundpinge silufiltri mahtuvuse ja -pulsatsiooni määramine Väljundkondensaatorid peavad olema valitud selliselt, et PTM i väljundpinge pulsatsioon ei ületaks tabelis 1.1 toodud maksimaalset väljundpinge pulsatsiooni s.o. Vp-p = 200 mv. Minimaalse vajaliku väljundpinge silufiltri mahtuvuse saab avaldada valemist 2.1. C outmin = Iout D 4A 0,45 = =36μ F (3.6) f s Δ v c 250kHz 200 mv 23
24 Kõigil elektrolüütkondensaatoritel on ekvivalentne järjestiktakistus(esr), mis on tingitud kondensaatori ehitusest ja kerkib kõrgetel sagedustel esile. See tõttu on vaja valida võimalikult väikese ESR väärtusega elektrolüütkondensaatorid. Kuna tegemist on järjestiktakistusega, siis on lihtne viis summaarset ESR väärtust vähendada lisades ühe kondensaatori asemel 2 identset kondensaatorit. Ohmi seadusest tulenevalt väheneb ESR sellist abinõud rakendades 2 korda. Kahe väljundkondensaatori korral jaguneb ka kondensaatoreid läbiv pulseeriv voolutugevus kondensaatorite vahel, mille tulemusena võib valida väiksema pulsatsiooni-voolutugevusega kondensaatorid. Valime väljundkondensaatoriteks kaks Panasaonic 35SVPf120M elektrolüütkondensaatorit, mille nimimahtuvus C = 120μF, ESR=18mΩ,V dc=35 V ja Irms =4,4 A [9]. Arvutame valemi 2.1 abil väljundpinge pulsatsiooni kahe kondensaatori summaarse mahtuvuse korral. Δ vc= I out D 4A 0,45 = =30 mv (3.7) f s C out 250kHz 2 120μ F Järgnevalt kontrollime, kui palju pulsatsiooni ESR lisab. Lisapulsatsioon on leitav valemiga 3.8 [6]. Δ v c ( ESR)= ESR( Iout Δ I L 4A 2,1 A + )=9m Ω ( + ) 75 mv (3.8) 1 D 2 (1 0,45) 2 Väljundpinge pulsatsioon on leitav: Vp-p = Δvc + Δvc(ESR) = 30mV + 75mV =105 mv. Väljundpinge pulsatsioonist moodustab pea kaks kolmandikku ESR ist tingitud pulsatsioon. Seetõttu on väga oluline kasutada meetmeid vähendamaks summaarset ESR i väärtust. 3.3 Jõudioodi valik. Hajuvõimsuse määramine Tabelist 2.1 järeldub, et sobivaim jõudiood, täitmaks VD 1 ülesandeid, on kõrge kiiretoimelisusega Schottky diood. Valemi 3.9 [6] abil saame arvutada Schottky dioodi läbiva voolutugevuse amplituudi. I d ( peak )= I out Δ IL 4 2,1 + = + =8,32 A (3.9) (1 D) 2 (1 0,45) 2 Valitud diood peab olema võimeline taluma kuni 10 A pärivoolu. Valime elektroonikakomponentide müügifirma Farnell veebikataloogi abil [9], STMicroElectronics i poolt 24
25 toodetud STPS20M100SG-TR D2PAK korpuses Schottky dioodi. Dioodi andmeleht on toodud lisas 2. Suurim lubatud dioodi läbiva voolu keskväärtus on 20 A täiteteguri D=0,5 korral ja päripingelang Vf =0,455 V. Dioodil hajuv võimsus on leitav valemi 2.7 abil järgmiselt: P d VD1=V f I out =0,455 4=1,82 W (3.10) Valitud Schottky diood talub vastupingelangu kuni 100 V, mis antud skeemis on rohkem kui piisav. 3.4 Jõutransistori tüübi valik. Parameetrite ja hajuvõimsuse määramine Jõutransistori valikul on oluline jälgida, et transistori tootja poolt lubatud parameetreid ei oleks ületatud. Joonisel 3.1 toodud skeemi on valitud firma Fairchild Nkanaliga kiiretoimeline MOSFET transistor FDD8647L. Transistori andmeleht on toodud lisas 4. Transistori ja dioodi läbiva voolu amplituudväärtus on sama (joonis 2.3). Seega läbib valitud transistori neelu voolutugevus kuni 8,32 A (valem 3.9). Tabelis 3.1 on toodud mõningad transistori FDD8647L olulisemad parameetrid. Tähis Parameeter Väärtus Ühik ID Suurim pidevalt lubatud neeluvool 14 A VDS Suurim lubatud neelu-lätte pingelang 40 V Vgs Suurim lubatud paisu-lätte pingelang 20 V Rds on Neelu-lätte staatiline takistus 9 mω Tabel 3.1 Transistori FDD8647L parameetrid. Transistoril hajuv võimsus sõltub neelu-lätte staatilisest takistusest, paisu-neelu mahtuvusest, transistori lülituskiirusest, -sagedustest ja paljudest teistest parameetritest. Hajuva võimsuse saab teatud lähendustel arvutada valemi 3.11 [6] abil. I out 2 I out 2 1 P D (Q )=( ) RDS on D+ V out ( ) (t r+t f ) f s+q gate V GS f s (3.11) 1 D 2 1 D 25
26 P D (Q )=( 4A 2 1 4A 2 ) 9m Ω 0,45+ 19V ( ) (2+3)ns 250kHz + 1 0, ,45 (3.11) +3,8 nc 7,2 V 250kHz=0,849 W Kus: tr on aeg, mis kulub transistoril sisse lülitumiseks, tr = 2 ns (lisa 4), tf on aeg, mis kulub transistoril välja lülitumiseks, tf = 3 ns (lisa 4), Qgate on paisu-lätte laeng, Qgate = 3,8 nc (lisa 4), VGS on transistori paisu-lätte pingelang, VGS = 7,2 V [7]. 3.5 Väljundpinge, tagasiside ja sageduse määramine Väljundpinge määratakse integraallülitusel LM3478 kahest takistist koosneva pingejaguri R3 ja R4 abil (joonis 3.1). LM3478 andmeleht [7] soovitab valida takisti R3=1 kω. Pingejaguri teise takisti väärtus on leitav valemiga 3.12 [7]. R (V 1,26 V ) 1k Ω (19V 1,26 V ) R4 = 3 out = 14 k Ω (3.12) 1,26V 1,26 V Voolu tagasisidetakisti väärtuse leidmiseks on vaja esmalt leida vool, mille juures peaks juhtahel lülitama transistori välja. Selle voolu leiame valemiga 3.13 [7]. I swlimit = I out D V in. 4A 0,45 11V + = + 8,26 A (3.13) 1 D 2 f s L 1 0, kHz 10μ H Selleks, et juhtahel ei piiraks liiga varakult drosselit läbivat voolu, soovitatakse andmelehes [7] suurendada Iswlimit voolu 120 protsenti, et vältida valerakendumist. Arvutame R9 väärtuse I d max =2,2 I sw limit =2,2 8,26 A 18,1 A korral valemiga 3.14[7]. R 9= V sense ( D V sense V sl ratio ) 0,156V 0,45 0,156V 0,49 = A 8 mω (3.14) I d max 18,1 Kus: Vsense on PWM komapraatori lävepinge, Vsense = 0,156 V (lisa 1) Vsl ratio on sisemise kompensatsiooniahela lävepinge ja PWM komparaatori lävepinge suhe, Vsl ratio = 0,49 (lisa 1). R9 takistil soojuseks hajuva võimsuse saame leida valemiga 3.15 [7]. P d R9=( I out 2 4A 2 ) R9 =( ) 8mΩ 0,423 W (3.15) 1 D 1 0,45 Seega tuleb R9 valida hajuvõimsusele kuni 1 W. 26
27 Ahel R6 ja C5 moodustab madalpääsfiltri, mis tagab kõrgsageduslike mürade summutamise integraallülituse LM3478 Isen sisendis [7]. PTM i töösagedus on määratav takistiga R5. Töösageduseks on valitud 250 khz. Leiame vajaliku takistuse valemiga 3.16 [7]. R FADJ =4, f 1,26 =4, kHz 1,26 71,1 k Ω (3.16). s Valime R5 = 71,5 kω. 3.6 Sisendkondensaatorite valik ja akulaetavuse kontrollahel Sisendahel koosneb kondensaatoritest C1,C4 ja takistist R1. Kondensaatori C1 ülesanne on vähendada sisendpinge pulsatsiooni ja andmeleht [7] soovitab valida kondensaatori nimimahtuvuseks mitte vähem kui 20 μf, kusjuures kondensaatori nominaalpinge peab olema vähemalt 25 % kõrgem kui nominaalne sisendpinge Vin. Joonisel 3.1 toodud skeemis on sisendkondensaatoriks valitud firma Panasonic elektrolüütkondensaator nimimahtuvusega 120 μf ja nominaalpingega 25 V [9]. Kondensaator C4 on ettenähtud kõrgema sageduslike mürade summutamiseks PWM modulaatori sisendis. C4 on keeramiline kondensaator nimimahtuvusega 100 nf ja nimipingega 25 V. Kondensaator C4 ja takisti R1 moodustavad madalpääsfiltri, mille ülesanne on tekitada kerge viide mikroskeemi LM3478 sisendis, et vältida skeemi rakendumist enne, kui väline toiteahel on saavutanud oma nominaalpinge. Vastavalt andmelehe [7] soovitustele valiti takistuse väärtuseks 22 Ω. Sisendahelasse on lisatud sisendpinge kontrollahel, mis annab kasutajale infot aku liigsest tühjenemisest või PTM i töötamisest liiga madalal sisendpingel. Sisendpinge kontrollahel koosneb stabilitronidest VD2 ja VD3, takistitest R7 ja R8 ning valgusdioodist LED1. Valgusdiood süttib, kui on täidetud võrratuse V in.<v vd2+v vd3 V f led1 tingimus, kus: Vin on sisendpinge, mille korral valgusdiood süttima peab [V], VVD2 on stabilitroni VD2 stabiliseerimispinge [V], VVD3 on stabilitroni VD3 stabiliseerimispinge [V], Vf led1 on valgusdioodi LED1 päripingelang [V]. 27
28 Valime valgusdioodiks L-7104LSRD [9] punase valgusvärvusega dioodi, mille päripingelang Vf led = 1,6 V [10], mille juures dioodi läbib vool Iled = 2 ma. Ülesande püstituses on toodud minimaalne sisendpinge Vin min=11 V, seega peab diood süttima enne, kui sisendpinge langeb alla 11 V. Valime stabilitroni VD 2 stabiliseerimispingega 5,1 V ja stabilitroni VD3 stabiliseerimispingega 7,5 V. Kontrollime eelpool toodud võrratust: V in.<5,1 V +7,5V 1,6 V V in.<11v Valgusdiood süttib, kui sisendpinge langeb alla 11 voldi, sellega on tagatud sisendpinge kontroll. Valime stabilitronideks VD2 ja VD3 firma Fairchild Semiconductors stabiltronid BZX84C5V1 ja BZX84C7V5 [9]. Valitud stabilitronide nimistabiliseerimisvool on IZ1 = IZ2 = 5 ma Järgnevalt arvutame takistite R7 ja R8 takistused tuginedes Ohmi seadusele valemite 3.17 ja 3.18 abil. V in. V D2 11V 5,1 V = 843 Ω (3.17) I led +I Z1 2mA+5mA V V D2 11V 7,5 V R8= in. = =500 Ω (3.18) I led +I Z2 5mA+2mA R 7= Valime R7 nominaalväärtusega 820 Ω ja R8 nominaalväärtusega 510 Ω. 28
29 3.7 Toiteseadme kasuteguri hindamine Põhilised energia kaod joonisel 3.1 toodud skeemis tekivad transistoril M 1, Schottky dioodil VD1 ja takistil R9 soojuseks hajuva võimsuse tõttu. Esmalt arvutame eelpool nimetatud komponentidel hajuva võimsuste summa. P d =P d (Q )+P d VD1+P d R9=0,849 W +1,82 W +0,432 3,1W (3.21) Kus: Pd(Q) on transistori M1 hajuvõimsus, Pd(Q) = 0,849 W (3.11), PdVD1 on dioodi VD1 hajuvõimsus, PdVD1 = 1,82 W (3.10), Pd R9 on takisti R9 hajuvõimsus, Pd R9 = 0,432 W (3.15). Kasutegur näitab mitu protsenti sisendisse antud võimsusest suudab PTM koormusele anda. PTM i kasutegurit maksimaalse väljundvõimsuse ja sisendpinge Vin=11 V korral on võimalik hinnata järgmiselt: ηptm = P out 100 %= P d + P out % 95,8 % (3.22) 76+3,3 Kus: ηptm on pinget tõstva muunduri kasutegur [%], Pd on PTM is soojuseks hajuv võimsus [W], Pout on PTM i maksimaalne väljundvõimsus. Kasuteguri arvutamisel on arvestatud ainult lülitustransistoril M 1, Schotkky dioodil VD1 ja takistil R9 tekkivate kadudega. Reaalselt hajub igal skeemi komponendil soojus, mis tõttu on PTM i tegelik kasutegur sisendpingel 11 V ja maksimaalsel väljundkoormusel mõnevõrra väiksem. Reaalne kasutegur tuleb mõõta peale PTM i koostamist elektroonikalaboris. 29
30 4.Toiteseadme elektriskeemi simulatsioon Selleks, et veenduda skeemi töövõimelisuses simuleeriti skeemi veebikeskonnas Webench [11]. Joonisel 4.1 on toodud simuleerimise skeem. Joonis 4.1 PTM i simuleerimise skeem 4.1 Elektriskeemi simulatsioonide tulemused Simulatsioonide põhieesmärk on kontrollida, kas PTM vastab ülesandepüstituses toodud parameetritele ja analüüsida toiteseadme tööd. Simuleerimine teostati sisendpinge Vin=12,6 V ja väljundvool Iout= 4 A korral. Skeemile teostati järgnevad simulatsioonid: Väljundpinge pulsatsioon ja drosselit L1 läbiv vool Drosseli L1 voolutugevus ja väljundkondensaatorite voolutugevus Väljundpinge ja lülitustransistori läbiv vool Väljundpinge ja Schottky dioodi läbiv vool Koormuse hüppekaja Sisenpinge hüppekaja Amplituud- ja faasisageduskarakteristik Sooritades ülaltoodud simulatsioonid saame anda hinnangu skeemi töövõimelisusele ja hinnata skeemi püsivust. Saame veenduda komponentide valikul tehtud arvutuste paikapidavuses. 30

31 1. Väljundpinge ja drosselit läbiv vool. Joonis 4.2 Väljundpinge pulsatsioon ja drosselit läbiva voolu kuju Joonisel 4.2 on toodud PTM i väljundpinge ja drosselit läbiva voolu kuju.väljundpinge on 100 mv väiksem, kui ülesande püstituses soovitud ja väljundpinge pulsatsioon on vähem kui 100 mv. Väiksem väljundpinge on tingitud tagasiside takisti R 4 valikust, mille käigus valiti standardreast kõige lähem väärtus. Väljundpingepulsatsioon on lubatud piirides, seega on väljundkondensaatorid valitud sobiva mahtuvusega. Drosselit L1 läbiv maksimaalne voolutugevus ulatub peaaegu 7,2 amprini, mis on umbes 1,1 amprit väiksem, kui valemis 3.4 arvutatud drosseli voolu amplituudväärtus IL max, mis on seletatav sellega et IL max arvutamisel võeti sisendpinge väärtuseks Vin=11 V. Drosseli voolu pulsatsioon on umbes 1,6 A ja drosselit läbiva voolu kujust on näha, et PTM töötab pidevas voolujuhtimise režiimis. 31

32 2. Drosselit L1 ja väljundkondensaatoreid läbiv vool. Joonis 4.3 Drosselit L1 ja väljundkondensaatoreid läbiv vool Jooniselt 4.3 on näha, et ajal kui toimub drosselisse energia salvestamine, toidavad koormust väljundkondensaatorid ja neid läbib koormusvooluga võrdne vool. Kui drossel on laetud, siis toidavad koormust nii drossel kui ka väljundkondensaatorid. Väljundkondensaatoreid läbiva voolu amplituud ulatub kuni 4 amprini. Kuna väljundit toidab kaks ühesugust kondensaatorit, siis jaguneb nende vahel väljundvool võrdselt. Valitud kondensaatorid taluvad voolu kuni 4,4 A. Seega töötavad kondensaatorid tootja poolt lubatud piirides. 32

33 3. Väljundpinge ja transistori M1 neelu vool. Joonis 4. 4 Väljundpinge ja transistori M1 neelu vool Joonisel 4.4 on toodud transistori M1 neelu läbiva voolu kuju. Hetkel, mil transistor lülitub sisse, toimub drosseli laadimine 5,6 amprist kuni 7,2 amprini, misjärel transistor lülitub välja. Transistori läbiva voolu amplituudväärtus on sama, mis drosselit läbival voolul. Valitud transistor kannatab neelu voolutugevust kuni 14 amprit. Seega töötab valitud transistor tootja poolt lubatud piirides. 33
34 4. Väljundpinge ja Schottky dioodi VD1 läbiv vool. Joonis 4.5 Väljundpinge ja Schottky dioodi VD1 läbiv vool Joonisel 4.5 on toodud väljundpinge ja dioodi VD1 läbiva voolu kuju. Schottky diood VD1 juhib voolu ajahetkel, kui transistor on sulgunud. Sel momendil toidetakse koormust induktiivsusse salvestunud energia arvelt läbi Schottky dioodi. Vool läbi dioodi kasvab hüppeliselt natuke üle seitsme ampri ja hakkab lineaarselt vähenema kuni jõuab umbes 5,4 amprini. Seejärel transistor avaneb taas ja vool läbi dioodi lõppeb. 34
35 5.Koormuse hüppekaja Joonis 4.6 Koormuse hüppekaja Joonisel 4.6 on toodud väljundpinge muutus järsul koormusvoolu vähenemisel. Hekel, kui koormusvool muutub hüppeliselt väiksemaks kui pool amprit, hakkab väljundpinge kasvama, kuna induktiivsusesse salvestunud energiat ei kasuta koormus ära. Väljundpinge taastumiseks kulub umbes 1,5 millisekundit. Kui koormusvool tõuseb järsult 3 amprini siis kukub väljundpinge järsult, sest induktiivsuses ja väljundkondensaatorites pole piisavalt energiat, et koormust toita. Väljundpinge taastumiseks kulub umbes 1 millisekund. Väljundpinge langeb järsult koormusvoolu kasvamisel umbes 16,6 voldini, sest koormus tarbib ära osa väljundkondensaatoritesse laetud energiast, mille tagasi laadimiseks kulub mitu lülitustsüklit. 35
36 6.Sisendpinge hüppekaja Joonis 4.7. Sisendpinge hüppekaja Joonisel 4.7 on toodud PTM i reaktsioon sisendpinge hüppele. Sisendpinge hüppekaja näitab väljundpinge muutust järsu sisendpinge muutumise korral. Sisendpinge järsul tõstmisel 11 voldist 14 voldini toimub väljundpinge hüpe umbes 200 mv ulatuses. Skeem suudab taastuda sisendpinge muutuste korral üpris kiiresti ja väljundpinge muutused on oluliselt väiksemad kui koormuse hüppekaja korral. 36
37 7.Amplituud- ja faasisageduskarakteristik Joonis 4.8 Amplituud- faasisageduskarakteristik. Amplituud- faasisageduskarakteristiku abil (joonis 4.8) on võimalik hinnata PTM i püsivust. Tähtsaimad punktid on lõikesagedus, faas lõikesagedusel, pingevõimendus faasinihkel 180 kraadi. Lõikesagedusest sõltub, kui kiiresti suudab skeem taastuda koormuse muutustel. Soovituslik lõikesagedus on vahemikus 1 1 fs< fx< fs, kus fx on lõikesagedus ja fs on skeemi töösagedus [3]. Joonisel toodud karakteristikus on lõikesagedus 5,9 khz, mis ei ole soovituslikes piirides, sellest ka skeemi aeglane taastumisaeg koormuse hüppekaja korral (joonis 4.6). Faas lõikesagedusel peab olema vähemalt 45 kraadi suurem kui -180 kraadi [3], faas lõikesagedusel on -139 kraadi, mis teeb faasiülejäägiks 49 kraadi. Pingevõimendus faasinihkel -180 kraadi peab vastama võrratusel G-180 < -10 db [3]. Joonisel 4.8 toodud karakteristikus on G ,5 db, mis mahub napilt lubatud piiridesse. Kokkuvõttes võib öelda, et skeem on püsiv. 37

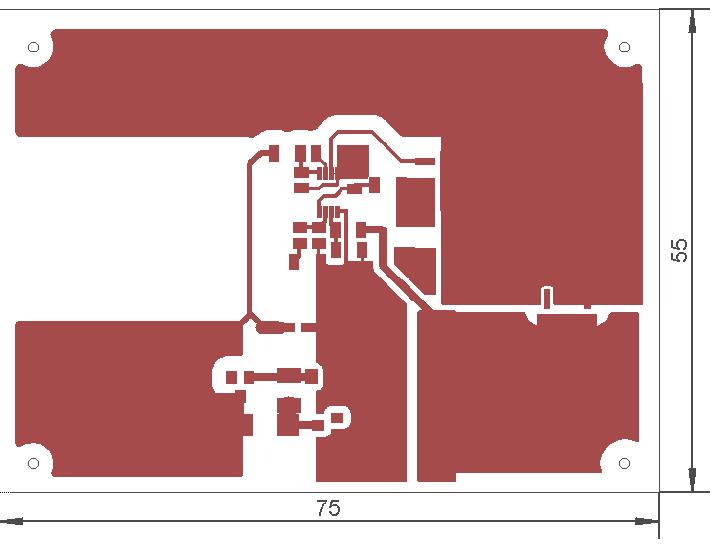
38 5.Trükkplaadi disain Trükkplaat on pea iga elektroonikaseadme lahutamatu osa. Lisaks mehhaanilise tugevuse suurendamisele täidab trükkplaat tihtilugu ka paratamatult tekkiva lisasoojuse ümbritsevasse keskonda juhtimise rolli. Hästi disainitud trükkplaat tagab elektroonikaseadme häireteta töö ja vähendab ümbritsevasse keskonda kiirguvaid elektromagnetilisi häireid. Samal ajal, kehvasti disainitud trükkplaadi korral ei pruugi seade mitte kunagi korralikult tööle hakata. Kõrge töösagedusega toiteseadmete põhilised müraprobleemid saavad alguse lülituselementide väga kiiretest lülitusaegadest. Joonisel 5.1 on toodud üks võimalikest trükkplaadi disainidest. Joonis 5.1 PTM i trükkplaadi vasest rajad ja komponentide paigutus Tükkplaadi mõõdud ja materjali parameetrid on toodud tabelis 5.1. Lisas 5 on toodud trükkplaadi ülemise vasekihi joonis. 38
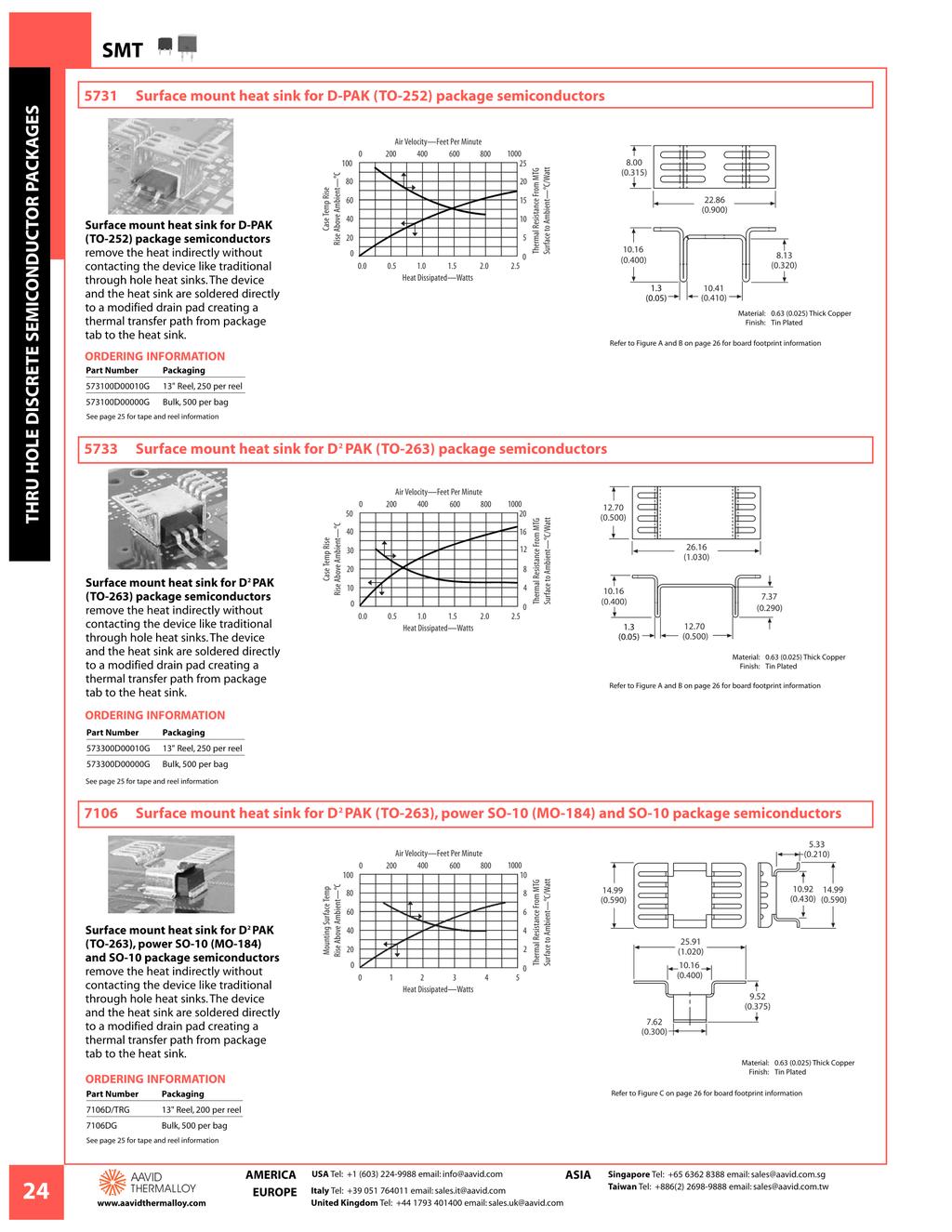
39 Parameeter Väärtus Materjal RF4 Mõõdud 75 x 55 mm Vasega kaetud kihte 2 Vasekihi paksus 70 μm Kihtide vaheliste läbiviikude arv Tabel 5.1 Trükkplaadi parameetrid. 4 Trükkplaadi disainimisel otsustati valida kõik elektroonikakomponendid pindmontaaži korpustes. Enamus takistid ja kondensaatorid on 0805 mõõtu korpustes. Pindmontaaži komponentide läbiviikudel on väiksem induktiivsus, mis vähendab elektromagnetilist kiirgust ja kõrgest sagedusest tingitud mürade tekkimist. Lisaks on pindmontaaži korral kogu seadme mõõdud väiksemad ja ka komponente ühendavad vasest rajad lühemad, mis vähendab radade induktiivsust. Kondensaatorid C5 ja C4 on paigutatud võimalikult pulsilaiusmodulaatori LM3478 lähedusse, et summutada kõrgsageduslikud mürad PLM i sisendis ja voolutagasiside jalal I sen. Plaadil on kokku neli läbiviiku alumisse kihti, mis on täies ulatuses ühendatud maapotentsiaaliga. Alumine maapotentsiaali väli aitab vähendada tekkivaid mürasid, kuna mööda alumist kihti tagasi kulgeva vooluga kaasnev magnetväli on teise suunaga ja kaks vastassuunalist magnetvälja tühistavad teineteist. Lisaks aitab maapotentsiaali väli juhtida transistoril ja Schottky dioodil hajuvat soojust ümbritsevasse keskkonda. Väljundkondensaatorite juurde on paigutatud 2 läbiviiku maakihti, et tagada võimalikult võrdne teekond mõlemat kondensaatorit läbivale voolule. Ühendusjuhtmed joodetakse otse plaadile. 5.1 Jahutustingimuste kontroll Transistoril M1 ja Schottky dioodil VD1 hajub neis tekkivate kadude tõttu soojus. Seega tuleb kontrollida M1 ja VD1 jahutustingimusi. Transistori ja dioodi siirete temperatuur ei tohi tõusta üle tootja poolt sätestatud maksimaalse temperatuuri. Siirde temperatuuri saab leida järgmiselt [13]: T j =T A+P d Rth ( j a) (5.1) Kus: Tj on pooljuhtsiirde temperatuur [⁰C], TA on keskonna temperatuur [⁰C], Pd on pooljuhtkomponendil hajuv võimsus [W], Rth (J-A) on termiline takistus pooljuhtsiirdest ümbritsevasse keskonda [⁰C/W] 39
40 1.Transistori M1 jahutustingimuste kontroll Lisas 4 on toodud transistori M 1 andmeleht. Andmelehel on Rth (J-A)=40 ⁰C/W, kui transistori korpus on joodetud trükiplaadi 1 ruut-tollisele ja 70 μm paksusele vasest alale. Trükiplaadi joonisel 5.1 on see tingimus täidetud. Arvutame transistori M 1 pooljuhtsiirete temperatuuri, kusjuures ümbritseva keskonna temperatuuriks võtame TA=50 ⁰C T j M1=T A+P d (q) Rth (J A )=50 C+0,849 W 40 C /W 84 C (5.2) Kus: Tj M1 on transistori M1 pooljuht siirde temperatuur [ C], Pd(Q) on transistori M1 hajuvõimsus, Pd(Q) = 0,849 W (3.10). Lisas 4 toodud andmelehel on transistori suurim lubatud siirde temperatuur Tj = 150 C. Seega on transistori M1 jahutustingimused head. 2.Schottky dioodi VD1 jahutustingimuste kontroll Schottky dioodi andmelehel ei ole eraldi välja toodud termilist takistust pooljuhtsiirdest ümbritsevasse keskkonda. Diood VD1 on sama tüüpi korpuses, milles transistor M1 seega võib eeldada, et dioodi temiline takistus pooljuhtsiirdest ümbritsevasse keskkonda on suurtes piirides sama, mis transistoril M1. Arvutame dioodi pooljuhtsiirde temperatuuri kasutades valemit 5.1. T j VD1=T A+ P d (VD1) Rth( J A)=50 C +1,82W 40 C /W 123 C (5.3) Kus: TjVD1 on dioodi VD1 pooljuhtsiirde temperatuur [ C], Pd(VD1) on dioodi VD1 hajuvõimsus, Pd(VD1) = 1,82 W (3.19). Dioodil VD1 maksimaalne lubatud pooljuhtsiirde temperatuur on 150 C [15]. Arvutatud siirdetemperatuur on üpris lähedal maksimaalsele lubatud temperatuurile, mis tõttu oleks PTM i töökindluse huvides mõistlik lisada dioodile VD 1 jahutusradiaator. Jahutusradiaatori üks võimalikest lahendustest on toodud lisas 6. 40
41 6.Majanduslik kalkulatsioon Antud töös väljatöötatud sülearvuti laadija ei ole ettenähtud seeriatootmiseks vaid prototüübiks, mida on vaja katsetada. Seetõttu on toodud ainult komponentide hinnad ja trükkplaadi tootmise hinda pole arvestatud. Komponentide hinnad on võetud veebilehelt kuupäeva seisuga. Tabelis 5 on toodud trükiplaadil asetsevate komponentide hinnad. Tähis skeemil Tüüp Täiendav info Kogus Hind EUR,tk U1 Mikroskeem LM3478MM 1 2,67 M1 Mosfet trans. FDD8647L 1 1,69 D1 Schottky diood STPS20M100S 1 1,2 L1 Drossel 10 μh 1 2,76 C7 ja C8 El. kondensaator 120 μf 2 2,28 C1 El. kondensaator 120 μf 1 0,61 C3 Kondensaator 47 nf 1 0,01 C2 Kondensaator 2,7 nf 1 0,01 C4 Kondensaator 100 nf 1 0,01 C5 Kondensaator 10 nf 1 0,01 R3 Takisti 1kΩ 1 0,03 R4 Takisti 14kΩ 1 0,03 R9 Takisti 8 mω 1 0,15 R6 Takisti 100 Ω 1 0,03 R5 Takisti 71,5 kω 1 0,03 R2 Takisti 2,49 kω 1 0,03 R1 Takisti 22 Ω 1 0,03 R7 Takisti 820 Ω 1 0,03 R8 Takisti 500 Ω 1 0,03 VD2 Stabilitron BZX84C5V1 1 0,04 VD3 Stabilitron BZX84C7V5 1 0,04 Kokku Tabel 5. Sülearvuti laadija elektroonikakomponentide hinnad 41 14,02 EUR
42 Kokkuvõte Antud bakalaureuse töö eesmärk oli välja töötada pinget tõstev muundur sülearvuti toiteks kas autonoomsest akust või auto elektrisüsteemist. Põhilised kriteeriumid toiteseadmele olid kõrge kasutegur, väiksed mõõtmed ja kaal ning madal hind. Tehniliseks lahenduseks valiti transformaatorita pinget tõstva muunduri topoloogia, mille tööpõhimõtet ka töös uuriti. Seejärel töötati välja seadme skeem ja teostati skeemikomponentide valik. Veendumaks skeemi töövõimelisuses ja kinnistamaks uuritud teooriat teostati skeemile mitmed simulatsioonid. Peale simulatsioonide tulemuste analüüsi veenduti skeemi töövõimelisuses ja projekteeriti skeemile trükkplaat. Järgmine samm on koostada projekteeritud toiteseadmele prototüüp. Valmis prototüübi abil saab testida kuidas väljatöötatud skeem püstitatud ülesannet täidab. Kui skeem töötab ülesande püstituses toodud kriteeriumitele vastavalt, siis võib projekteerida korpuse, mis kaitseb seadet mehhaaniliste vigastuste eest ja aitab juhtida kadudena hajuvat soojust ümbritsevasse keskonda. 42
43 Kirjandus 1. Aqeel Mahesri,Vibhore Vardhan - Power Consumption Breakdown on a Modern Laptop,( ) er-power-usage ( ) 3. Marty Brown Practical Switcing power supply design (1990) 4. ( ) 5. Alejandro Olivia, Simon Ang Power-Switching Converters, Third Edition.(2011) Sanjaya Maniktala Swiching Power Supplies A-Z.(2012)
44 Lisa 1 44
45 45
46 46
47 47
48 Lisa 2 48
49 Lisa 3 49
50 Lisa 4 50
51 51
52 Lisa 5 52
53 Lisa 6 53
DE_loeng5
 Digitaalelektroonika V loeng loogikalülitused KMOP transistoridega meeldetuletus loogikalülitused TTL baasil baaslülitus inverteri tunnusjooned ja hilistumine LS lülitus kolme olekuga TTL ja avatud kollektoriga
Digitaalelektroonika V loeng loogikalülitused KMOP transistoridega meeldetuletus loogikalülitused TTL baasil baaslülitus inverteri tunnusjooned ja hilistumine LS lülitus kolme olekuga TTL ja avatud kollektoriga
Slide 1
 ERAÜ XVII TALVEPÄEV 2015 Uue põlvkonna LDMOS transistorvõimendid 14.veebruar 2015 Mart Tagasaar, ES2NJ Sissejuhatus Alates 2010.aastast on turule ilmunud uue põlvkonna LDMOS transistorid võimsusega 600-1400W,
ERAÜ XVII TALVEPÄEV 2015 Uue põlvkonna LDMOS transistorvõimendid 14.veebruar 2015 Mart Tagasaar, ES2NJ Sissejuhatus Alates 2010.aastast on turule ilmunud uue põlvkonna LDMOS transistorid võimsusega 600-1400W,
TTÜ Robotiklubi
 Robot Igaühele Robootika ja elektroonika põhitõed Programmeerimine, Arduino Roboti disain ja ehituse algus Roboti ehitus ja jootmine Robotite programmeerimine Ülesande lahendamine Lõppvõistlus Sissejuhatus
Robot Igaühele Robootika ja elektroonika põhitõed Programmeerimine, Arduino Roboti disain ja ehituse algus Roboti ehitus ja jootmine Robotite programmeerimine Ülesande lahendamine Lõppvõistlus Sissejuhatus
ISS0050 Mõõtmine
 ISC0100 KÜBERELEKTROONIKA Kevad 2018 Viies loeng Martin Jaanus U02-308 (hetkel veel) martin.jaanus@ttu.ee 620 2110, 56 91 31 93 Õppetöö : http://isc.ttu.ee Õppematerjalid : http://isc.ttu.ee/martin Teemad
ISC0100 KÜBERELEKTROONIKA Kevad 2018 Viies loeng Martin Jaanus U02-308 (hetkel veel) martin.jaanus@ttu.ee 620 2110, 56 91 31 93 Õppetöö : http://isc.ttu.ee Õppematerjalid : http://isc.ttu.ee/martin Teemad
Antennide vastastikune takistus
 Antennide vastastikune takistus Eelmises peatükis leidsime antenni kiirgustakistuse arvestamata antenni lähedal teisi objekte. Teised objektid, näiteks teised antennielemendid, võivad aga mõjutada antenni
Antennide vastastikune takistus Eelmises peatükis leidsime antenni kiirgustakistuse arvestamata antenni lähedal teisi objekte. Teised objektid, näiteks teised antennielemendid, võivad aga mõjutada antenni
P9_10 estonian.cdr
 Registreerige oma toode ja saage abi kodulehelt www.philips.com/welcome P9/10 Eestikeelne kasutusjuhend 2 Ühendage P9 kõlar Bluetooth ühenduse kaudu oma Bluetooth seadmega, nagu näiteks ipadiga, iphone'iga,
Registreerige oma toode ja saage abi kodulehelt www.philips.com/welcome P9/10 Eestikeelne kasutusjuhend 2 Ühendage P9 kõlar Bluetooth ühenduse kaudu oma Bluetooth seadmega, nagu näiteks ipadiga, iphone'iga,
raamat5_2013.pdf
 Peatükk 5 Prognoosiintervall ja Usaldusintervall 5.1 Prognoosiintervall Unustame hetkeks populatsiooni parameetrite hindamise ja pöördume tagasi üksikvaatluste juurde. On raske ennustada, milline on huvipakkuva
Peatükk 5 Prognoosiintervall ja Usaldusintervall 5.1 Prognoosiintervall Unustame hetkeks populatsiooni parameetrite hindamise ja pöördume tagasi üksikvaatluste juurde. On raske ennustada, milline on huvipakkuva
Võrguinverterite valik ja kasutusala päikeseelektrijaamades Robert Mägi insener
 Võrguinverterite valik ja kasutusala päikeseelektrijaamades Robert Mägi insener Robert Mägi o Õpingud: Riga Technical University o Haridus: MSc (Electrical Engineering) MSc (Automatic Telecommunications)
Võrguinverterite valik ja kasutusala päikeseelektrijaamades Robert Mägi insener Robert Mägi o Õpingud: Riga Technical University o Haridus: MSc (Electrical Engineering) MSc (Automatic Telecommunications)
DJI GOGGLES Kiirjuhend V1.0
 DJI GOGGLES Kiirjuhend V1.0 DJI Goggles DJI Goggles on mugavad prillid, mis on disainitud mugavaks FPV lendamiseks DJI toodetega. Nad loovad ultra-kõrge kvaliteediga pildi, minimaalse viivitusega pikamaa
DJI GOGGLES Kiirjuhend V1.0 DJI Goggles DJI Goggles on mugavad prillid, mis on disainitud mugavaks FPV lendamiseks DJI toodetega. Nad loovad ultra-kõrge kvaliteediga pildi, minimaalse viivitusega pikamaa
Taskuprinter KASUTUSJUHEND
 Taskuprinter KASUTUSJUHEND Täname, et ostsite taskuprinteri Polaroid Mint. Käesoleva kasutusjuhendi eesmärk on anda teile juhiseid toote ohutuks kasutamiseks ja et see ei kujutaks endast kasutajale mingit
Taskuprinter KASUTUSJUHEND Täname, et ostsite taskuprinteri Polaroid Mint. Käesoleva kasutusjuhendi eesmärk on anda teile juhiseid toote ohutuks kasutamiseks ja et see ei kujutaks endast kasutajale mingit
B120_10 estonian.cdr
 Alati seal, et teid aidata Registreerige oma toode ja otsige abi koduleheküljelt www.philips.com/welcome B120 Beebimonitor Küsimus? Kontakteeruge Philipsiga Eestikeelne kasutusjuhend 2 Valgussensor USB
Alati seal, et teid aidata Registreerige oma toode ja otsige abi koduleheküljelt www.philips.com/welcome B120 Beebimonitor Küsimus? Kontakteeruge Philipsiga Eestikeelne kasutusjuhend 2 Valgussensor USB
Tarvikud _ Puhurid ja vaakumpumbad INW külgkanaliga Air and Vacuum Components in-eco.co.ee
 Tarvikud _ Puhurid ja vaakumpumbad INW külgkanaliga Air and Vacuum Components in-eco.co.ee IN-ECO, spol. s r.o. Radlinského 13 T +421 44 4304662 F +421 44 4304663 E info@in-eco.sk Õhufiltrid integreeritud
Tarvikud _ Puhurid ja vaakumpumbad INW külgkanaliga Air and Vacuum Components in-eco.co.ee IN-ECO, spol. s r.o. Radlinského 13 T +421 44 4304662 F +421 44 4304663 E info@in-eco.sk Õhufiltrid integreeritud
Tarkvaraline raadio Software defined radio (SDR) Jaanus Kalde 2017
 Jaanus Kalde 2017") Tarkvaraline raadio Software defined radio (SDR) Jaanus Kalde 2017 Sissejuhatus Raadiosidest üldiselt Tarkvaraline raadio Kuidas alustada 2 Raadioside Palju siinussignaale õhus Info edastamiseks moduleerid
Tarkvaraline raadio Software defined radio (SDR) Jaanus Kalde 2017 Sissejuhatus Raadiosidest üldiselt Tarkvaraline raadio Kuidas alustada 2 Raadioside Palju siinussignaale õhus Info edastamiseks moduleerid
Tala dimensioonimine vildakpaindel
 Tala dimensioonimine vildakpaindel Ülesanne Joonisel 9 kujutatud okaspuidust konsool on koormatud vertikaaltasandis ühtlase lauskoormusega p ning varda teljega risti mõjuva kaldjõuga (-jõududega) F =pl.
Tala dimensioonimine vildakpaindel Ülesanne Joonisel 9 kujutatud okaspuidust konsool on koormatud vertikaaltasandis ühtlase lauskoormusega p ning varda teljega risti mõjuva kaldjõuga (-jõududega) F =pl.
VRB 2, VRB 3
 Tehniline andmeleht Sadulventiilid (PN 6) VR - tee ventiil, sise- ja väliskeere 3-tee ventiil, sise- ja väliskeere Kirjeldus Omadused Mullikindel konstruktsioon Mehaaniline snepperühendus täiturmootoriga
Tehniline andmeleht Sadulventiilid (PN 6) VR - tee ventiil, sise- ja väliskeere 3-tee ventiil, sise- ja väliskeere Kirjeldus Omadused Mullikindel konstruktsioon Mehaaniline snepperühendus täiturmootoriga
KIIRJUHEND Lugege kiirjuhend enne seadme kasutamist hoolikalt läbi. Kõik tärniga (*) märgitud juhised kehtivad WLAN + 3G mudelitele (Lenovo B6000-H(V)
 märgitud juhised kehtivad WLAN + 3G mudelitele (Lenovo B6000-H(V)") KIIRJUHEND Lugege kiirjuhend enne seadme kasutamist hoolikalt läbi. Kõik tärniga (*) märgitud juhised kehtivad WLAN + 3G mudelitele (Lenovo B6000-H(V) / Lenovo B8000-H). Tehnilised andmed Mudeli nimetus
KIIRJUHEND Lugege kiirjuhend enne seadme kasutamist hoolikalt läbi. Kõik tärniga (*) märgitud juhised kehtivad WLAN + 3G mudelitele (Lenovo B6000-H(V) / Lenovo B8000-H). Tehnilised andmed Mudeli nimetus
Microsoft Word - Sobitusahelate_projekteerimine.doc
 Sobitusahelate projekteerimine Vaatleme 3 erinevat meetodit: koondparameetitega elementidel sobitamine häälestusribaga sobitamine veerandlainelõiguga sobitamine Sobitust võib vaadelda koormustakistuse
Sobitusahelate projekteerimine Vaatleme 3 erinevat meetodit: koondparameetitega elementidel sobitamine häälestusribaga sobitamine veerandlainelõiguga sobitamine Sobitust võib vaadelda koormustakistuse
VRG 2, VRG 3
 Tehniline andmeleht Sadulventiilid (PN 16) 2-tee ventiil, väliskeermega 3-tee ventiil, väliskeermega Kirjeldus Omadused Mullikindel konstruktsioon Mehhaaniline snepperühendus täiturmootoriga MV(E) 335,
Tehniline andmeleht Sadulventiilid (PN 16) 2-tee ventiil, väliskeermega 3-tee ventiil, väliskeermega Kirjeldus Omadused Mullikindel konstruktsioon Mehhaaniline snepperühendus täiturmootoriga MV(E) 335,
Microsoft Word - DB2_TECEfloor Raumthermostat Analog_EN_est
 1 TECEfloori toatermostaat Analog (RT-A ja RT-A HK) TECEfloori toatermostaat Analog on kvaliteetne toatermostaat ruumi temperatuuri registreerimiseks ja muuutmiseks ning pakub maksimaalset kasutusmugavust.
1 TECEfloori toatermostaat Analog (RT-A ja RT-A HK) TECEfloori toatermostaat Analog on kvaliteetne toatermostaat ruumi temperatuuri registreerimiseks ja muuutmiseks ning pakub maksimaalset kasutusmugavust.
Tootmine_ja_tootlikkus
 TOOTMINE JA TOOTLIKKUS Juhan Lehepuu Leiame vastused küsimustele: Mis on sisemajanduse koguprodukt ja kuidas seda mõõdetakse? Kuidas mõjutavad sisemajanduse koguprodukti muutused elatustaset? Miks sõltub
TOOTMINE JA TOOTLIKKUS Juhan Lehepuu Leiame vastused küsimustele: Mis on sisemajanduse koguprodukt ja kuidas seda mõõdetakse? Kuidas mõjutavad sisemajanduse koguprodukti muutused elatustaset? Miks sõltub
6 tsooniga keskus WFHC MASTER RF 868MHz & 4 või 6 tsooniga alaseade SLAVE RF KASUTUSJUHEND 6 tsooniga WFHC RF keskus & 4 või 6 tsooniga alaseade SLAVE
 6 tsooniga keskus WFHC MASTER RF 868MHz & 4 või 6 tsooniga alaseade SLAVE RF KASUTUSJUHEND 6 tsooniga WFHC RF keskus & 4 või 6 tsooniga alaseade SLAVE RF 868MHz 3-6 EE 1. KASUTUSJUHEND 6 tsooniga WFHC
6 tsooniga keskus WFHC MASTER RF 868MHz & 4 või 6 tsooniga alaseade SLAVE RF KASUTUSJUHEND 6 tsooniga WFHC RF keskus & 4 või 6 tsooniga alaseade SLAVE RF 868MHz 3-6 EE 1. KASUTUSJUHEND 6 tsooniga WFHC
CPA4164 USB 2.0 kõrgekvaliteediline videoadapter KASUTUSJUHEND 1. PEATÜKK - Ülevaade 1.1 Tutvustus CPA4164 USB 2.0 videoadapter võimaldab teil arvutis
 CPA4164 USB 2.0 kõrgekvaliteediline videoadapter KASUTUSJUHEND 1. PEATÜKK - Ülevaade 1.1 Tutvustus CPA4164 USB 2.0 videoadapter võimaldab teil arvutisse laadida ja redigeerida erinevatest analoogvideo
CPA4164 USB 2.0 kõrgekvaliteediline videoadapter KASUTUSJUHEND 1. PEATÜKK - Ülevaade 1.1 Tutvustus CPA4164 USB 2.0 videoadapter võimaldab teil arvutisse laadida ja redigeerida erinevatest analoogvideo
Tehniline andmeleht Sadulventiilid (PN 16) VRG 2 2-tee ventiil, väliskeermega VRG 3 3-tee ventiil, väliskeermega Kirjeldus Ventiilid on kasutatavad ko
 VRG 2 2-tee ventiil, väliskeermega VRG 3 3-tee ventiil, väliskeermega Kirjeldus Ventiilid on kasutatavad ko") Tehniline andmeleht Sadulventiilid (PN 16) VRG 2 2-tee ventiil, väliskeermega VRG 3 3-tee ventiil, väliskeermega Kirjeldus Ventiilid on kasutatavad koos AMV(E) 335, AMV(E) 435 ja AMV(E) 438 SU täiturmootoritega.
Tehniline andmeleht Sadulventiilid (PN 16) VRG 2 2-tee ventiil, väliskeermega VRG 3 3-tee ventiil, väliskeermega Kirjeldus Ventiilid on kasutatavad koos AMV(E) 335, AMV(E) 435 ja AMV(E) 438 SU täiturmootoritega.
Microsoft PowerPoint - Kaasaegne elektriajam
 Ajamitele esitatavad nõuded Kaasaegne elektriajam Sissejuhatus sagedusjuhtimisse Kiiruse reguleerimine vastavalt protsessi omapäradele. Ajalooliselt: astmeline reguleerimine käigukasti ehk muudetava mehaanilise
Ajamitele esitatavad nõuded Kaasaegne elektriajam Sissejuhatus sagedusjuhtimisse Kiiruse reguleerimine vastavalt protsessi omapäradele. Ajalooliselt: astmeline reguleerimine käigukasti ehk muudetava mehaanilise
ISS0050 Mõõtmine
 MHK0120 SISSEJUHATUS MEHHATROONIKASSE Sügis 2018 Tagasiside Martin Jaanus U02-308 (hetkel veel) martin.jaanus@ttu.ee 620 2110, 56 91 31 93 Õppetöö : http://isc.ttu.ee Õppematerjalid : http://isc.ttu.ee/martin
MHK0120 SISSEJUHATUS MEHHATROONIKASSE Sügis 2018 Tagasiside Martin Jaanus U02-308 (hetkel veel) martin.jaanus@ttu.ee 620 2110, 56 91 31 93 Õppetöö : http://isc.ttu.ee Õppematerjalid : http://isc.ttu.ee/martin
STECA PÄIKESEPANEELIDE KONTROLLERID Steca Tarom MPPT 6000, 6000-M Steca Tarom MPPT laadimiskontroller on seade, mis loob uusi kasutusstandardeid. Kont
 STECA PÄIKESEPANEELIDE KONTROLLERID Steca Tarom MPPT 6000, 6000-M Steca Tarom MPPT laadimiskontroller on seade, mis loob uusi kasutusstandardeid. Kontrolleri laialdased kasutusvõimalused on tagatud tänu
STECA PÄIKESEPANEELIDE KONTROLLERID Steca Tarom MPPT 6000, 6000-M Steca Tarom MPPT laadimiskontroller on seade, mis loob uusi kasutusstandardeid. Kontrolleri laialdased kasutusvõimalused on tagatud tänu
29 th International Physics Olympiad Reykjavik, Iceland Eksperimentaalne võistlus Esmaspäev, 6. juuli 1998 Kasutada olev aeg: 5 tundi Loe esmalt seda:
 9 th International Physics Olympiad Reykjavik, Iceland Eksperimentaalne võistlus Esmaspäev, 6. juuli 1998 Kasutada olev aeg: 5 tundi Loe esmalt seda: 1. Kasuta ainult korraldajate antud sulepead.. Kasuta
9 th International Physics Olympiad Reykjavik, Iceland Eksperimentaalne võistlus Esmaspäev, 6. juuli 1998 Kasutada olev aeg: 5 tundi Loe esmalt seda: 1. Kasuta ainult korraldajate antud sulepead.. Kasuta
Kasutusjuhend Dragon Winch vintsile DWM, DWH, DWT seeria Sisukord Üldised ohutusnõuded... 3 Vintsimise ohutusnõuded... 3 Kasulik teada... 4 Vintsimise
 Kasutusjuhend Dragon Winch vintsile DWM, DWH, DWT seeria Sisukord Üldised ohutusnõuded... 3 Vintsimise ohutusnõuded... 3 Kasulik teada... 4 Vintsimisel on hea teada... 5 Vintsi hooldus... 6 Garantii...
Kasutusjuhend Dragon Winch vintsile DWM, DWH, DWT seeria Sisukord Üldised ohutusnõuded... 3 Vintsimise ohutusnõuded... 3 Kasulik teada... 4 Vintsimisel on hea teada... 5 Vintsi hooldus... 6 Garantii...
Praks 1
 Biomeetria praks 3 Illustreeritud (mittetäielik) tööjuhend Eeltöö 1. Avage MS Excel is oma kursuse ankeedivastuseid sisaldav andmestik, 2. lisage uus tööleht, 3. nimetage see ümber leheküljeks Praks3 ja
Biomeetria praks 3 Illustreeritud (mittetäielik) tööjuhend Eeltöö 1. Avage MS Excel is oma kursuse ankeedivastuseid sisaldav andmestik, 2. lisage uus tööleht, 3. nimetage see ümber leheküljeks Praks3 ja
Microsoft PowerPoint - Niitmise_tuv_optiline_ja_radar.pptx
 Ettekanne ESTGIS aastakonverentsil 30.11.2012 Niidetud alade tuvastamine multispektraalsete ja radarsatelliidipiltide põhjal Kaupo Voormansik Sisukord 1. Eksperiment 2012 suvel multispektraalsete mõõtmiste
Ettekanne ESTGIS aastakonverentsil 30.11.2012 Niidetud alade tuvastamine multispektraalsete ja radarsatelliidipiltide põhjal Kaupo Voormansik Sisukord 1. Eksperiment 2012 suvel multispektraalsete mõõtmiste
G TECTA 4G mitme gaasi detektor EE Lühijuhend
 G TECTA 4G mitme gaasi detektor Lühijuhend 2 Sisukord Ohutus- ning ettevaatusabinõud 2 Karbi sisu 3 Toote ülevaade 3 Toote omadused 3 Akude kontrollimine 4 Sisselülitamine 4 G-TECTA 4G käivitusprotsess
G TECTA 4G mitme gaasi detektor Lühijuhend 2 Sisukord Ohutus- ning ettevaatusabinõud 2 Karbi sisu 3 Toote ülevaade 3 Toote omadused 3 Akude kontrollimine 4 Sisselülitamine 4 G-TECTA 4G käivitusprotsess
Relatsiooniline andmebaaside teooria II. 6. Loeng
 Relatsiooniline andmebaaside teooria II. 5. Loeng Anne Villems ATI Loengu plaan Sõltuvuste pere Relatsiooni dekompositsioon Kadudeta ühendi omadus Sõltuvuste pere säilitamine Kui jõuame, siis ka normaalkujud
Relatsiooniline andmebaaside teooria II. 5. Loeng Anne Villems ATI Loengu plaan Sõltuvuste pere Relatsiooni dekompositsioon Kadudeta ühendi omadus Sõltuvuste pere säilitamine Kui jõuame, siis ka normaalkujud
efo09v2pke.dvi
 Eesti koolinoorte 56. füüsikaolümpiaad 17. jaanuar 2009. a. Piirkondlik voor. Põhikooli ülesanded 1. (VÄRVITILGAD LAUAL) Ühtlaselt ja sirgjooneliselt liikuva horisontaalse laua kohal on kaks paigalseisvat
Eesti koolinoorte 56. füüsikaolümpiaad 17. jaanuar 2009. a. Piirkondlik voor. Põhikooli ülesanded 1. (VÄRVITILGAD LAUAL) Ühtlaselt ja sirgjooneliselt liikuva horisontaalse laua kohal on kaks paigalseisvat
Microsoft Word - Toetuste veebikaardi juhend
 Toetuste veebikaardi juhend Toetuste veebikaardi ülesehitus Joonis 1 Toetuste veebikaardi vaade Toetuste veebikaardi vaade jaguneb tinglikult kaheks: 1) Statistika valikute osa 2) Kaardiaken Statistika
Toetuste veebikaardi juhend Toetuste veebikaardi ülesehitus Joonis 1 Toetuste veebikaardi vaade Toetuste veebikaardi vaade jaguneb tinglikult kaheks: 1) Statistika valikute osa 2) Kaardiaken Statistika
E-õppe ajalugu
 Koolituskeskkonnad MTAT.03.142 avaloeng Anne Villems September 2014.a. Põhiterminid Koolituskeskkonnad (Learning environments) IKT hariduses (ICT in education) E-õpe (e-learning) Kaugõpe (distance learning)
Koolituskeskkonnad MTAT.03.142 avaloeng Anne Villems September 2014.a. Põhiterminid Koolituskeskkonnad (Learning environments) IKT hariduses (ICT in education) E-õpe (e-learning) Kaugõpe (distance learning)
MOVIMOT® MM..D
 Ajamitehnika \ Ajami automatiseerimine \ Süsteemi integreerimine \ Teenused *23583509_0817* Korrektuur Detsentraalsed ajamisüsteemid MOVIMOT MM..D Väljund 08/2017 23583509/ET SEW-EURODRIVE Driving the
Ajamitehnika \ Ajami automatiseerimine \ Süsteemi integreerimine \ Teenused *23583509_0817* Korrektuur Detsentraalsed ajamisüsteemid MOVIMOT MM..D Väljund 08/2017 23583509/ET SEW-EURODRIVE Driving the
vv05lah.dvi
 IMO 05 Eesti võistkonna valikvõistlus 3. 4. aprill 005 Lahendused ja vastused Esimene päev 1. Vastus: π. Vaatleme esiteks juhtu, kus ringjooned c 1 ja c asuvad sirgest l samal pool (joonis 1). Olgu O 1
IMO 05 Eesti võistkonna valikvõistlus 3. 4. aprill 005 Lahendused ja vastused Esimene päev 1. Vastus: π. Vaatleme esiteks juhtu, kus ringjooned c 1 ja c asuvad sirgest l samal pool (joonis 1). Olgu O 1
Võistlusülesanne Vastutuulelaev Finaal
 Võistlusülesanne Vastutuulelaev Finaal CADrina 2016 võistlusülesannete näol on tegemist tekst-pilt ülesannetega, milliste lahendamiseks ei piisa ainult jooniste ülevaatamisest, vaid lisaks piltidele tuleb
Võistlusülesanne Vastutuulelaev Finaal CADrina 2016 võistlusülesannete näol on tegemist tekst-pilt ülesannetega, milliste lahendamiseks ei piisa ainult jooniste ülevaatamisest, vaid lisaks piltidele tuleb
Sissejuhatus mehhatroonikasse MHK0120
 Sissejuhatus mehhatroonikasse MHK0120 5. nädala loeng Raavo Josepson raavo.josepson@ttu.ee Pöördliikumine Kulgliikumine Kohavektor Ԧr Kiirus Ԧv = d Ԧr dt Kiirendus Ԧa = dv dt Pöördliikumine Pöördenurk
Sissejuhatus mehhatroonikasse MHK0120 5. nädala loeng Raavo Josepson raavo.josepson@ttu.ee Pöördliikumine Kulgliikumine Kohavektor Ԧr Kiirus Ԧv = d Ԧr dt Kiirendus Ԧa = dv dt Pöördliikumine Pöördenurk
TELLIJAD Riigikantselei Eesti Arengufond Majandus- ja Kommunikatsiooniministeerium KOOSTAJAD Olavi Grünvald / Finantsakadeemia OÜ Aivo Lokk / Väärtusi
 TELLIJAD Riigikantselei Eesti Arengufond Majandus- ja Kommunikatsiooniministeerium KOOSTAJAD Olavi Grünvald / Finantsakadeemia OÜ Aivo Lokk / Väärtusinsener OÜ Tallinnas 14.04.2014 Uuring Energiamajanduse
TELLIJAD Riigikantselei Eesti Arengufond Majandus- ja Kommunikatsiooniministeerium KOOSTAJAD Olavi Grünvald / Finantsakadeemia OÜ Aivo Lokk / Väärtusinsener OÜ Tallinnas 14.04.2014 Uuring Energiamajanduse
Ülesanne #5: Käik objektile Kooli ümberkujundamist vajava koha analüüs. Ülesanne #5 juhatab sisse teise poole ülesandeid, mille käigus loovad õpilased
 Ülesanne #5: Käik objektile Kooli ümberkujundamist vajava koha analüüs. Ülesanne #5 juhatab sisse teise poole ülesandeid, mille käigus loovad õpilased oma kujunduse ühele kohale koolis. 5.1 Kohavalik Tiimi
Ülesanne #5: Käik objektile Kooli ümberkujundamist vajava koha analüüs. Ülesanne #5 juhatab sisse teise poole ülesandeid, mille käigus loovad õpilased oma kujunduse ühele kohale koolis. 5.1 Kohavalik Tiimi
Praks 1
 Biomeetria praks 6 Illustreeritud (mittetäielik) tööjuhend Eeltöö 1. Avage MS Excel is oma kursuse ankeedivastuseid sisaldav andmestik, 2. lisage uus tööleht, nimetage see ümber leheküljeks Praks6 ja 3.
Biomeetria praks 6 Illustreeritud (mittetäielik) tööjuhend Eeltöö 1. Avage MS Excel is oma kursuse ankeedivastuseid sisaldav andmestik, 2. lisage uus tööleht, nimetage see ümber leheküljeks Praks6 ja 3.
Lisa I_Müra modelleerimine
 LISA I MÜRA MODELLEERIMINE Lähteandmed ja metoodika Lähteandmetena kasutatakse AS K-Projekt poolt koostatud võimalikke eskiislahendusi (trassivariandid A ja B) ning liiklusprognoosi aastaks 2025. Kuna
LISA I MÜRA MODELLEERIMINE Lähteandmed ja metoodika Lähteandmetena kasutatakse AS K-Projekt poolt koostatud võimalikke eskiislahendusi (trassivariandid A ja B) ning liiklusprognoosi aastaks 2025. Kuna
Microsoft Word - Järvamaa_KOVid_rahvastiku analüüs.doc
 Töömaterjal. Rivo Noorkõiv. Käesolev töö on koostatud Siseministeeriumi poolt osutatava kohalikeomavalitsuste ühinemist toetava konsultatsioonitöö raames. Järvamaa omavalitsuste rahvastiku arengu üldtrendid
Töömaterjal. Rivo Noorkõiv. Käesolev töö on koostatud Siseministeeriumi poolt osutatava kohalikeomavalitsuste ühinemist toetava konsultatsioonitöö raames. Järvamaa omavalitsuste rahvastiku arengu üldtrendid
Monitooring
 IT infrastruktuuri teenused Monitooring Margus Ernits margus.ernits@itcollege.ee 1 Miks? Arvutisüsteemid töötavad tõrgetega Pole olemas 100% veakindlaid ja keerulisi arvutisüsteeme Tõrgetest võib teada
IT infrastruktuuri teenused Monitooring Margus Ernits margus.ernits@itcollege.ee 1 Miks? Arvutisüsteemid töötavad tõrgetega Pole olemas 100% veakindlaid ja keerulisi arvutisüsteeme Tõrgetest võib teada
Väljaandja: Vabariigi Valitsus Akti liik: määrus Teksti liik: terviktekst Redaktsiooni jõustumise kp: Redaktsiooni kehtivuse lõpp:
 Väljaandja: Vabariigi Valitsus Akti liik: määrus Teksti liik: terviktekst Redaktsiooni jõustumise kp: 05.12.2004 Redaktsiooni kehtivuse lõpp: 29.04.2007 Avaldamismärge: Töökeskkonna füüsikaliste ohutegurite
Väljaandja: Vabariigi Valitsus Akti liik: määrus Teksti liik: terviktekst Redaktsiooni jõustumise kp: 05.12.2004 Redaktsiooni kehtivuse lõpp: 29.04.2007 Avaldamismärge: Töökeskkonna füüsikaliste ohutegurite
Microsoft Word - QOS_2008_Tallinn_OK.doc
 GSM mobiiltelefoniteenuse kvaliteet Tallinnas, juuni 2008 Sideteenuste osakond 2008 Kvaliteedist üldiselt GSM mobiiltelefonivõrgus saab mõõta kümneid erinevaid tehnilisi parameetreid ja nende kaudu võrku
GSM mobiiltelefoniteenuse kvaliteet Tallinnas, juuni 2008 Sideteenuste osakond 2008 Kvaliteedist üldiselt GSM mobiiltelefonivõrgus saab mõõta kümneid erinevaid tehnilisi parameetreid ja nende kaudu võrku
JABRA STYLE Kasutusjuhend jabra.com/style
 Kasutusjuhend jabra.com/style SISUKORD 1. TERE TULEMAST... 3 2. PEAKOMPLEKT... 4 3. KANDMINE... 5 3.1 KUULARIKATETE VAHETAMINE 4. AKU LAADIMINE... 6 5. ÜHENDAMINE... 7 5.1 BLUETOOTH SEADMEGA ÜHENDAMINE
Kasutusjuhend jabra.com/style SISUKORD 1. TERE TULEMAST... 3 2. PEAKOMPLEKT... 4 3. KANDMINE... 5 3.1 KUULARIKATETE VAHETAMINE 4. AKU LAADIMINE... 6 5. ÜHENDAMINE... 7 5.1 BLUETOOTH SEADMEGA ÜHENDAMINE
Automaatjuhtimise alused Automaatjuhtimissüsteemi kirjeldamine Loeng 2
 Automaatjuhtimise alused Automaatjuhtimissüsteemi kirjeldamine Loeng 2 Laplace'i teisendus Diferentsiaalvõrrandite lahendamine ilma tarkvara toeta on keeruline Üheks lahendamisvõtteks on Laplace'i teisendus
Automaatjuhtimise alused Automaatjuhtimissüsteemi kirjeldamine Loeng 2 Laplace'i teisendus Diferentsiaalvõrrandite lahendamine ilma tarkvara toeta on keeruline Üheks lahendamisvõtteks on Laplace'i teisendus
Lisa 2 Maanteeameti peadirektori käskkirjale nr 0250 Kattega riigimaanteede taastusremondi objektide valikumetoodika Maanteeamet Tallinn 20
 Lisa 2 Maanteeameti peadirektori 02.07.2013 käskkirjale nr 0250 Kattega riigimaanteede taastusremondi objektide valikumetoodika Maanteeamet Tallinn 2013 0 Sisukord Sisukord... 1 Sissejuhatus... 2 Metoodika
Lisa 2 Maanteeameti peadirektori 02.07.2013 käskkirjale nr 0250 Kattega riigimaanteede taastusremondi objektide valikumetoodika Maanteeamet Tallinn 2013 0 Sisukord Sisukord... 1 Sissejuhatus... 2 Metoodika
ArcGIS Online Konto loomine Veebikaardi loomine Rakenduste tegemine - esitlus
 PILVI TAUER Tallinna Tehnikagümnaasium ArcGIS Online 1.Konto loomine 2.Veebikaardi loomine 3.Rakenduste tegemine - esitlus Avaliku konto loomine Ava ArcGIS Online keskkond http://www.arcgis.com/ ning logi
PILVI TAUER Tallinna Tehnikagümnaasium ArcGIS Online 1.Konto loomine 2.Veebikaardi loomine 3.Rakenduste tegemine - esitlus Avaliku konto loomine Ava ArcGIS Online keskkond http://www.arcgis.com/ ning logi
Eesti koolinoorte 66. füüsikaolümpiaad 06. aprill a. Vabariiklik voor. Gümnaasiumi ülesannete lahendused 1. (AUTOD) (6 p.) Kuna autod jäävad sei
 (6 p.) Kuna autod jäävad sei") Eesti koolinoorte 66. füüsikaolümpiaad 06. aprill 2019. a. Vabariiklik voor. Gümnaasiumi ülesannete lahendused 1. (AUTOD) (6 p.) Kuna autod jäävad seisma samaaegselt, siis läheme ühe ühe autoga seotud
Eesti koolinoorte 66. füüsikaolümpiaad 06. aprill 2019. a. Vabariiklik voor. Gümnaasiumi ülesannete lahendused 1. (AUTOD) (6 p.) Kuna autod jäävad seisma samaaegselt, siis läheme ühe ühe autoga seotud
Polünoomi juured Juure definitsioon ja Bézout teoreem Vaadelgem polünoomi kus K on mingi korpus. f = a 0 x n + a 1 x n a n 1 x
 1 5.5. Polünoomi juured 5.5.1. Juure definitsioon ja Bézout teoreem Vaadelgem polünoomi kus K on mingi korpus. f = a 0 x n + a 1 x n 1 +... + a n 1 x + a n K[x], (1) Definitsioon 1. Olgu c K. Polünoomi
1 5.5. Polünoomi juured 5.5.1. Juure definitsioon ja Bézout teoreem Vaadelgem polünoomi kus K on mingi korpus. f = a 0 x n + a 1 x n 1 +... + a n 1 x + a n K[x], (1) Definitsioon 1. Olgu c K. Polünoomi
Microsoft Word - EVS_ISO_IEC_27001;2014_et_esilehed.doc
 EESTI STANDARD EVS-ISO/IEC 27001:2014 INFOTEHNOLOOGIA Turbemeetodid Infoturbe halduse süsteemid Nõuded Information technology Security techniques Information security management systems Requirements (ISO/IEC
EESTI STANDARD EVS-ISO/IEC 27001:2014 INFOTEHNOLOOGIA Turbemeetodid Infoturbe halduse süsteemid Nõuded Information technology Security techniques Information security management systems Requirements (ISO/IEC
(Microsoft Word - ÜP küsimustiku kokkuvõte kevad 2019)
") Ümbrikupalkade küsimustiku kokkuvõte Ülevaade on koostatud alates 2017. aasta kevadest korraldatud küsitluste põhjal, võimalusel on võrdlusesse lisatud ka 2016. aasta küsitluse tulemused, kui vastava aasta
Ümbrikupalkade küsimustiku kokkuvõte Ülevaade on koostatud alates 2017. aasta kevadest korraldatud küsitluste põhjal, võimalusel on võrdlusesse lisatud ka 2016. aasta küsitluse tulemused, kui vastava aasta
lvk04lah.dvi
 Lahtine matemaatikaülesannete lahendamise võistlus. veebruaril 004. a. Lahendused ja vastused Noorem rühm 1. Vastus: a) jah; b) ei. Lahendus 1. a) Kuna (3m+k) 3 7m 3 +7m k+9mk +k 3 3M +k 3 ning 0 3 0,
Lahtine matemaatikaülesannete lahendamise võistlus. veebruaril 004. a. Lahendused ja vastused Noorem rühm 1. Vastus: a) jah; b) ei. Lahendus 1. a) Kuna (3m+k) 3 7m 3 +7m k+9mk +k 3 3M +k 3 ning 0 3 0,
(Microsoft Word - Matsalu Veev\344rk AS aktsion\344ride leping \(Lisa D\) Valemid )
 Valemid )") 1(6) 1. Vee- ja kanalisatsiooniteenuse hinna kujundamise põhimõtted Aktsiaselts tegevuskulude arvestuse aluseks on auditeeritud ja kinnitatud aastaaruanne. Hinnakujunduse analüüsis kasutatakse Aktsiaseltsi
1(6) 1. Vee- ja kanalisatsiooniteenuse hinna kujundamise põhimõtted Aktsiaselts tegevuskulude arvestuse aluseks on auditeeritud ja kinnitatud aastaaruanne. Hinnakujunduse analüüsis kasutatakse Aktsiaseltsi
Müük (Microsoft Dynamics AX (Axapta) tarkvara) Paigaldusjuhend bifree.ee qlik.com
 tarkvara) Paigaldusjuhend bifree.ee qlik.com") Müük (Microsoft Dynamics AX (Axapta) tarkvara) Paigaldusjuhend bifree.ee qlik.com Microsoft Dynamics AX (Axapta) tarkvara 2 Seadistamise etapid 1. Laadige alla ja installeerige Qlik Sense Desktop. 2. Laadige
Müük (Microsoft Dynamics AX (Axapta) tarkvara) Paigaldusjuhend bifree.ee qlik.com Microsoft Dynamics AX (Axapta) tarkvara 2 Seadistamise etapid 1. Laadige alla ja installeerige Qlik Sense Desktop. 2. Laadige
FRESENIUS ÕPPEKESKUS KIIRJUHEND
 FRESENIUS ÕPPEKESKUS KIIRJUHEND SISUKORD 1. Kuidas saan Freseniuse õppekeskuksesse? 03 2. Kuidas sisse logida? 04 3. Mida teha, kui ma ei mäleta oma parooli? 05 4. Mida leian kodulehelt pärast sisselogimist?
FRESENIUS ÕPPEKESKUS KIIRJUHEND SISUKORD 1. Kuidas saan Freseniuse õppekeskuksesse? 03 2. Kuidas sisse logida? 04 3. Mida teha, kui ma ei mäleta oma parooli? 05 4. Mida leian kodulehelt pärast sisselogimist?
Microsoft Word - ref - Romet Piho - Tutorial D.doc
 Tartu Ülikool Andmetöötluskeel "Tutorial D" realisatsiooni "Rel" põhjal Referaat aines Tarkvaratehnika Romet Piho Informaatika 2 Juhendaja Indrek Sander Tartu 2005 Sissejuhatus Tänapäeval on niinimetatud
Tartu Ülikool Andmetöötluskeel "Tutorial D" realisatsiooni "Rel" põhjal Referaat aines Tarkvaratehnika Romet Piho Informaatika 2 Juhendaja Indrek Sander Tartu 2005 Sissejuhatus Tänapäeval on niinimetatud
A9RE06B.tmp
 Head Quarter accelerate the future Õlivabad kolbkompressorid Nüüd ka 100%-se koormatavusega www.gentilincompressors.com Professionaalsed õlivabad kompressorid RUUMI KOKKUHOID Algselt väljavenitatud vertikaalne
Head Quarter accelerate the future Õlivabad kolbkompressorid Nüüd ka 100%-se koormatavusega www.gentilincompressors.com Professionaalsed õlivabad kompressorid RUUMI KOKKUHOID Algselt väljavenitatud vertikaalne
Mehhatroonikainstituut Mehhatroonikasüsteemide õppetool MHK40LT Lauri Leemet ANDMEHÕIVESÜSTEEM PURJELAUALE Bakalaureusetöö Autor taotleb tehnikateadus
 Mehhatroonikainstituut Mehhatroonikasüsteemide õppetool MHK40LT Lauri Leemet ANDMEHÕIVESÜSTEEM PURJELAUALE Bakalaureusetöö Autor taotleb tehnikateaduste bakalaureuse akadeemilist kraadi Tallinn 2014 AUTORIDEKLARATSIOON
Mehhatroonikainstituut Mehhatroonikasüsteemide õppetool MHK40LT Lauri Leemet ANDMEHÕIVESÜSTEEM PURJELAUALE Bakalaureusetöö Autor taotleb tehnikateaduste bakalaureuse akadeemilist kraadi Tallinn 2014 AUTORIDEKLARATSIOON
PowerPoint Presentation
 Eesti pensionisüsteem võrdluses teiste Euroopa riikidega: olukord, väljakutsed ja kesksed valikud Lauri Leppik 7.06.2019 Pension kui vanadusea sissetulek Pension on ühiskondliku tööjaotuse kaasanne tekkis
Eesti pensionisüsteem võrdluses teiste Euroopa riikidega: olukord, väljakutsed ja kesksed valikud Lauri Leppik 7.06.2019 Pension kui vanadusea sissetulek Pension on ühiskondliku tööjaotuse kaasanne tekkis
Microsoft Word - Pt4.doc
 4 OSTSILLOGRAAF 4.1 STRUKTUUR Ossillograaf seade elekrivõnkumise (pinge) ajalise kuju jälgimiseks ja mõõmiseks. Liigius: analoogossillograafid ja digiaalossillograafid. a) Analoogossillograaf S CRT S&K
4 OSTSILLOGRAAF 4.1 STRUKTUUR Ossillograaf seade elekrivõnkumise (pinge) ajalise kuju jälgimiseks ja mõõmiseks. Liigius: analoogossillograafid ja digiaalossillograafid. a) Analoogossillograaf S CRT S&K
I klassi õlipüüdur kasutusjuhend
 I-KLASSI ÕLIPÜÜDURITE PAIGALDUS- JA HOOLDUSJUHEND PÜÜDURI DEFINITSIOON JPR -i õlipüüdurite ülesandeks on sadevee või tööstusliku heitvee puhastamine heljumist ja õlijääkproduktidest. Püüduri ülesehitus
I-KLASSI ÕLIPÜÜDURITE PAIGALDUS- JA HOOLDUSJUHEND PÜÜDURI DEFINITSIOON JPR -i õlipüüdurite ülesandeks on sadevee või tööstusliku heitvee puhastamine heljumist ja õlijääkproduktidest. Püüduri ülesehitus
遥控器使用说明书(ROHS) ALPA-CS349-R09D(E)-0301(内容)
 ALPA-CS349-R09D(E)-0301(内容)") KASUTUSJUHEND SIIRDATAV KDITSIEER KAUGJUHTIMISPULDI KASUTUSJUHEND AM-5PR(N) Täname teid, et olete soetanud endale meie õhukonditsioneeri Palun lugege hoolikalt käesolevat kasutusjuhendit enne seadme kasutamist
KASUTUSJUHEND SIIRDATAV KDITSIEER KAUGJUHTIMISPULDI KASUTUSJUHEND AM-5PR(N) Täname teid, et olete soetanud endale meie õhukonditsioneeri Palun lugege hoolikalt käesolevat kasutusjuhendit enne seadme kasutamist
Microsoft PowerPoint - IRZ0050_13L.pptx
 15. Hüdroakustilised d infohankesüsteemid id Kirjandus: Arro I. Sonartehnika, Tln., TTÜ kirjastus, 1998 Otsingu sõna: Sonar + signal processing, echo sounding, underwater acoustics, hydroacoustics, active
15. Hüdroakustilised d infohankesüsteemid id Kirjandus: Arro I. Sonartehnika, Tln., TTÜ kirjastus, 1998 Otsingu sõna: Sonar + signal processing, echo sounding, underwater acoustics, hydroacoustics, active
VL1_praks6_2010k
 Biomeetria praks 6 Illustreeritud (mittetäielik) tööjuhend Eeltöö 1. Avage MS Excel is oma kursuse ankeedivastuseid sisaldav andmestik, 2. lisage uus tööleht (Insert / Lisa -> Worksheet / Tööleht), nimetage
Biomeetria praks 6 Illustreeritud (mittetäielik) tööjuhend Eeltöö 1. Avage MS Excel is oma kursuse ankeedivastuseid sisaldav andmestik, 2. lisage uus tööleht (Insert / Lisa -> Worksheet / Tööleht), nimetage
PowerPoint Presentation
 Strateegilise koostöö projekti eelarve Katriin Ranniku 17.02.2016 Millest tuleb juttu? Mis reguleerib Erasmus+ programmist rahastatavaid projekte? Millised on Erasmus+ strateegilise koostöö projekti eelarveread?
Strateegilise koostöö projekti eelarve Katriin Ranniku 17.02.2016 Millest tuleb juttu? Mis reguleerib Erasmus+ programmist rahastatavaid projekte? Millised on Erasmus+ strateegilise koostöö projekti eelarveread?
Caterpillar Inc. 100 NE Adams Street, Peoria, IL USA Meedianumber U9NE8460 Tegevusdokument Lisateave GRADE süsteemi komponentide nõuetele vastav
 Tegevusdokument Lisateave GRADE süsteemi komponentide nõuetele vastavuse teave 1 Sisukord lk Ohutusmärgid ja -sildid... 3 Ohutusteated... 4 Muud sildid... 5 Üldine ohuteave... 6 Edastamine... 6 Sissejuhatus...
Tegevusdokument Lisateave GRADE süsteemi komponentide nõuetele vastavuse teave 1 Sisukord lk Ohutusmärgid ja -sildid... 3 Ohutusteated... 4 Muud sildid... 5 Üldine ohuteave... 6 Edastamine... 6 Sissejuhatus...
Estonian_TBW-106UB(V1).cdr
.cdr") Lühike paigaldusjuhend TBW-106UB H/W: V1 Sisukord... 1 1. Enne alustamist... 1 2. Kuidas paigaldada... 3. Bluetooth adapteriseadistamine... 2 5 Tõrkeotsing... 7 Version 02.17.2009 1. Enne alustamist Pakendi
Lühike paigaldusjuhend TBW-106UB H/W: V1 Sisukord... 1 1. Enne alustamist... 1 2. Kuidas paigaldada... 3. Bluetooth adapteriseadistamine... 2 5 Tõrkeotsing... 7 Version 02.17.2009 1. Enne alustamist Pakendi
(Tõrked ja töökindlus \(2\))
)") Elektriseadmete tõrked ja töökindlus Click to edit Master title style 2016 sügis 2 Prof. Tõnu Lehtla VII-403, tel.6203 700 http://www.ttu.ee/energeetikateaduskond/elektrotehnika-instituut/ Kursuse sisu
Elektriseadmete tõrked ja töökindlus Click to edit Master title style 2016 sügis 2 Prof. Tõnu Lehtla VII-403, tel.6203 700 http://www.ttu.ee/energeetikateaduskond/elektrotehnika-instituut/ Kursuse sisu
Tartu Ülikool
 Tartu Ülikool Code coverage Referaat Koostaja: Rando Mihkelsaar Tartu 2005 Sissejuhatus Inglise keelne väljend Code coverage tähendab eesti keeles otse tõlgituna koodi kaetust. Lahti seletatuna näitab
Tartu Ülikool Code coverage Referaat Koostaja: Rando Mihkelsaar Tartu 2005 Sissejuhatus Inglise keelne väljend Code coverage tähendab eesti keeles otse tõlgituna koodi kaetust. Lahti seletatuna näitab
Word Pro - digiTUNDkaug.lwp
 / näide: \ neeldumisseadusest x w x y = x tuleneb, et neeldumine toimub ka näiteks avaldises x 2 w x 2 x 5 : x 2 w x 2 x 5 = ( x 2 ) w ( x 2 ) [ x 5 ] = x 2 Digitaalskeemide optimeerimine (lihtsustamine)
/ näide: \ neeldumisseadusest x w x y = x tuleneb, et neeldumine toimub ka näiteks avaldises x 2 w x 2 x 5 : x 2 w x 2 x 5 = ( x 2 ) w ( x 2 ) [ x 5 ] = x 2 Digitaalskeemide optimeerimine (lihtsustamine)
Microsoft Word - polkaudio 2010 hinnakiri
 polkaudio 2010 hinnakiri HINNAKIRI 2010 Kirjeldus Viimistlus Hinna Hind EEK Hind ühik 20%km 20%km naturaalne LSi SEEERIA spoon LSi 15 Põrandakõlar või kirss tk. 11344 725 LSi 9 Riiulikõlar või kirss paar
polkaudio 2010 hinnakiri HINNAKIRI 2010 Kirjeldus Viimistlus Hinna Hind EEK Hind ühik 20%km 20%km naturaalne LSi SEEERIA spoon LSi 15 Põrandakõlar või kirss tk. 11344 725 LSi 9 Riiulikõlar või kirss paar
Majandus- ja kommunikatsiooniministri 10. aprill a määrus nr 26 Avaliku konkursi läbiviimise kord, nõuded ja tingimused sageduslubade andmiseks
 Majandus- ja kommunikatsiooniministri 10. aprill 2013. a määrus nr 26 Avaliku konkursi läbiviimise kord, nõuded ja tingimused sageduslubade andmiseks maapealsetes süsteemides üldkasutatava elektroonilise
Majandus- ja kommunikatsiooniministri 10. aprill 2013. a määrus nr 26 Avaliku konkursi läbiviimise kord, nõuded ja tingimused sageduslubade andmiseks maapealsetes süsteemides üldkasutatava elektroonilise
Uudiseid k-meride abil bakterite leidmisest [Compatibility Mode]
![Uudiseid k-meride abil bakterite leidmisest [Compatibility Mode]](/thumbs/88/116394963.jpg "Uudiseid k-meride abil bakterite leidmisest [Compatibility Mode]") Uudiseid k-meride abil bakterite leidmisest CLARK: fast and accurate classification of metagenomic and genomic sequences using discriminative k-mers(2015) Rachid Ounit, Steve Wanamaker, Timothy J. Close
Uudiseid k-meride abil bakterite leidmisest CLARK: fast and accurate classification of metagenomic and genomic sequences using discriminative k-mers(2015) Rachid Ounit, Steve Wanamaker, Timothy J. Close
Mida räägivad logid programmeerimisülesande lahendamise kohta? Heidi Meier
 Mida räägivad logid programmeerimisülesande lahendamise kohta? Heidi Meier 09.02.2019 Miks on ülesannete lahendamise käigu kohta info kogumine oluline? Üha rohkem erinevas eas inimesi õpib programmeerimist.
Mida räägivad logid programmeerimisülesande lahendamise kohta? Heidi Meier 09.02.2019 Miks on ülesannete lahendamise käigu kohta info kogumine oluline? Üha rohkem erinevas eas inimesi õpib programmeerimist.
Technology Esimene PowerSense tehnoloogiaga elektromehaaniline tööriist
 www.klauke.com Technology Esimene PowerSense tehnoloogiaga elektromehaaniline tööriist Ajad muutuvad. Kompaktne ja maksimaalselt tõhus Kõikjal kus vaja kiiret, kergekaalulist ja effektiivset tööriista
www.klauke.com Technology Esimene PowerSense tehnoloogiaga elektromehaaniline tööriist Ajad muutuvad. Kompaktne ja maksimaalselt tõhus Kõikjal kus vaja kiiret, kergekaalulist ja effektiivset tööriista
C-SEERIA JA VJATKA-SEERIA LÄBIVOOLUKUIVATID
 C-SEERIA JA VJATKA-SEERIA LÄBIVOOLUKUIVATID C-SEERIA LÄBIVOOLUKUIVATID TÕHUSAKS JA ÜHTLASEKS VILJA KUIVATAMISEKS Mepu kõrgtehnoloogilised, pideva vooluga, sooja õhuga kuivatid kuivatavad vilja õrnalt,
C-SEERIA JA VJATKA-SEERIA LÄBIVOOLUKUIVATID C-SEERIA LÄBIVOOLUKUIVATID TÕHUSAKS JA ÜHTLASEKS VILJA KUIVATAMISEKS Mepu kõrgtehnoloogilised, pideva vooluga, sooja õhuga kuivatid kuivatavad vilja õrnalt,
Microsoft Word - requirements.doc
 Dokumendi ajalugu: Versioon Kuupäev Tegevus Autor 1.0 04.03.2008 Dokumendi loomine Madis Abel 1.1 09.03.2008 Kasutuslugude loomine Madis Abel 1.2 12.03.2008 Kasutuslugude täiendused Andres Kalle 1.3 13.03.2008
Dokumendi ajalugu: Versioon Kuupäev Tegevus Autor 1.0 04.03.2008 Dokumendi loomine Madis Abel 1.1 09.03.2008 Kasutuslugude loomine Madis Abel 1.2 12.03.2008 Kasutuslugude täiendused Andres Kalle 1.3 13.03.2008
AJ3123_12 estonian.cdr
 Registreerige oma toode ja saage tuge www.philips.com/welcome AJ3123 Külastage Philipsit internetis: http://www.philips.com Eestikeelne kasutusjuhend 8. ed Kõik muudatused ja modifikatsioonid, mis pole
Registreerige oma toode ja saage tuge www.philips.com/welcome AJ3123 Külastage Philipsit internetis: http://www.philips.com Eestikeelne kasutusjuhend 8. ed Kõik muudatused ja modifikatsioonid, mis pole
SAF 7 demo paigaldus. 1.Eeldused SAF 7 demo vajab 32- või 64-bitist Windows 7, Window 8, Windows 10, Windows Server 2008 R2, Windows Server 2012, Wind
 SAF 7 demo paigaldus. 1.Eeldused SAF 7 demo vajab 32- või 64-bitist Windows 7, Window 8, Windows 10, Windows Server 2008 R2, Windows Server 2012, Windows Server 2012 R2, Windows Server 2016 või Windows
SAF 7 demo paigaldus. 1.Eeldused SAF 7 demo vajab 32- või 64-bitist Windows 7, Window 8, Windows 10, Windows Server 2008 R2, Windows Server 2012, Windows Server 2012 R2, Windows Server 2016 või Windows
Microsoft Word _08_D7_RU_ET--1530_kujundatud.doc
 KASUTUSJUHEND TAIMERIGA JUHTSEADE JA ELEKTROONILISED SIDEMOODULID EST KIRJELDUS Termostaadid ja juhtseade on juhtmeta ühenduses, kasutades aktiivantenni. Tegevusraadius kinnises ruumis on umbes 50 m. Nädalaprogramm.
KASUTUSJUHEND TAIMERIGA JUHTSEADE JA ELEKTROONILISED SIDEMOODULID EST KIRJELDUS Termostaadid ja juhtseade on juhtmeta ühenduses, kasutades aktiivantenni. Tegevusraadius kinnises ruumis on umbes 50 m. Nädalaprogramm.
Elisa Ring Elisa Ringi mobiilirakendus Versioon
 Elisa Ring Elisa Ringi mobiilirakendus Versioon 1.0.85 15.01.2019 1 Elisa Ring... 1 1. Ülevaade... 3 1.1. Kirjeldus... 3 1.2. Tehnilised tingimused... 3 1.3. Kasutuselevõtt ja sisselogimine... 3 2. Rakenduse
Elisa Ring Elisa Ringi mobiilirakendus Versioon 1.0.85 15.01.2019 1 Elisa Ring... 1 1. Ülevaade... 3 1.1. Kirjeldus... 3 1.2. Tehnilised tingimused... 3 1.3. Kasutuselevõtt ja sisselogimine... 3 2. Rakenduse
Slide 1
 Elektrituru avanemine 2013 Priit Värk Koduomanike Liit Ajalugu Euroopa Liidu elektriturg avanes täielikult 2007 juuli Ühtse siseturu põhimõte kaupade vaba liikumine; Turu avanemine tuleneb liitumislepingust
Elektrituru avanemine 2013 Priit Värk Koduomanike Liit Ajalugu Euroopa Liidu elektriturg avanes täielikult 2007 juuli Ühtse siseturu põhimõte kaupade vaba liikumine; Turu avanemine tuleneb liitumislepingust
Microsoft Word - SCD38USB
 SCD-38 USB KAASASKANTAV RAADIO/CD/MP3- MÄNGIJA USB-GA Kasutusjuhend Lenco soovitab lugeda juhendit hoolikalt enne seadme kasutamist. Rohkem informatsiooni www.lenco.eu Hea klient, Täname Teid,e t olete
SCD-38 USB KAASASKANTAV RAADIO/CD/MP3- MÄNGIJA USB-GA Kasutusjuhend Lenco soovitab lugeda juhendit hoolikalt enne seadme kasutamist. Rohkem informatsiooni www.lenco.eu Hea klient, Täname Teid,e t olete
Microsoft Word - Suure thermori pass2.doc
 PAIGALDAMINE KASUTAMINE HOOLDUS SUUREMAHULISED 500-3000 L VEEBOILERID Need on sukel-ja keraamilise küttekehaga elektrilised veesoojendid. Võimalikud on variandid kus täiendavalt küttekehale on ka kesküttesüsteemiga
PAIGALDAMINE KASUTAMINE HOOLDUS SUUREMAHULISED 500-3000 L VEEBOILERID Need on sukel-ja keraamilise küttekehaga elektrilised veesoojendid. Võimalikud on variandid kus täiendavalt küttekehale on ka kesküttesüsteemiga
Renovation of Historic Wooden Apartment Buildings
 Hoonete õhuleke ja selle mõõtmine Click to edit Master title style Endrik Arumägi Targo Kalamees Teadmistepõhine ehitus 26.04.2018 Piirdetarindite õhulekked Iseloomustavad suurused õhuvahetuvuskordsus
Hoonete õhuleke ja selle mõõtmine Click to edit Master title style Endrik Arumägi Targo Kalamees Teadmistepõhine ehitus 26.04.2018 Piirdetarindite õhulekked Iseloomustavad suurused õhuvahetuvuskordsus
Microsoft Word - Mesi, kestvuskatsed, doc
 MEEPROOVIDE KESTVUSKATSED Tallinn 2017 Töö nimetus: Meeproovide kestvuskatsed. Töö autorid: Anna Aunap Töö tellija: Eesti Mesinike Liit Töö teostaja: Marja 4D Tallinn, 10617 Tel. 6112 900 Fax. 6112 901
MEEPROOVIDE KESTVUSKATSED Tallinn 2017 Töö nimetus: Meeproovide kestvuskatsed. Töö autorid: Anna Aunap Töö tellija: Eesti Mesinike Liit Töö teostaja: Marja 4D Tallinn, 10617 Tel. 6112 900 Fax. 6112 901
Andmed arvuti mälus Bitid ja baidid
 Andmed arvuti mälus Bitid ja baidid A bit about bit Bitt, (ingl k bit) on info mõõtmise ühik, tuleb mõistest binary digit nö kahendarv kahe võimaliku väärtusega 0 ja 1. Saab näidata kahte võimalikku olekut
Andmed arvuti mälus Bitid ja baidid A bit about bit Bitt, (ingl k bit) on info mõõtmise ühik, tuleb mõistest binary digit nö kahendarv kahe võimaliku väärtusega 0 ja 1. Saab näidata kahte võimalikku olekut
SPORTident Air+
 Tarmo Klaar 2012-2013 Esimene koolitus Eestis 2012, Põlvas Ülevaade Uus riistvara Vana tarkvara Proovime kasutada, näited Põhineb hetkel teadaoleval funktsionaalsusel. Tootja ei ole veel lõplikku versiooni
Tarmo Klaar 2012-2013 Esimene koolitus Eestis 2012, Põlvas Ülevaade Uus riistvara Vana tarkvara Proovime kasutada, näited Põhineb hetkel teadaoleval funktsionaalsusel. Tootja ei ole veel lõplikku versiooni
BIOMEHHAANILINE TAUST- PÕHIPRINTSIIBID
 BIOMEHHAANILINE TAUST - PÕHIPRINTSIIBID HOIA LIIGESED NEUTRAALSES ASENDIS Siis on lihased lõdvestunud ja saavad paremini töötada Lihaste, liigeste ja kõõluste stressi põhjustavad: kokkupigistatud käed
BIOMEHHAANILINE TAUST - PÕHIPRINTSIIBID HOIA LIIGESED NEUTRAALSES ASENDIS Siis on lihased lõdvestunud ja saavad paremini töötada Lihaste, liigeste ja kõõluste stressi põhjustavad: kokkupigistatud käed
IMO 2000 Eesti võistkonna valikvõistlus Tartus, aprillil a. Ülesannete lahendused Esimene päev 1. Olgu vaadeldavad arvud a 1, a 2, a 3,
 IMO 000 Eesti võistkonna valikvõistlus Tartus, 19. 0. aprillil 000. a. Ülesannete lahendused Esimene päev 1. Olgu vaadeldavad arvud a 1, a, a 3, a 4, a 5. Paneme tähele, et (a 1 + a + a 3 a 4 a 5 ) (a
IMO 000 Eesti võistkonna valikvõistlus Tartus, 19. 0. aprillil 000. a. Ülesannete lahendused Esimene päev 1. Olgu vaadeldavad arvud a 1, a, a 3, a 4, a 5. Paneme tähele, et (a 1 + a + a 3 a 4 a 5 ) (a
Side
 SIDE (IRT 90) Loeng Signaalid sidekanalis Teema - signaalid Signaaliülekanne üüsilises kanalies Põhiriba signaal ja selle esius Kisaribalised ja laiaribalised signaalid vs kanalid Häirekindluse agamine
SIDE (IRT 90) Loeng Signaalid sidekanalis Teema - signaalid Signaaliülekanne üüsilises kanalies Põhiriba signaal ja selle esius Kisaribalised ja laiaribalised signaalid vs kanalid Häirekindluse agamine
KOTKAS AVE kasutajakeskne juhend Loomise Muutmise kuupäev: kuupäev: Versioon: 2.0 Klient: Keskkonnaministeeriumi Infotehno
 Loomise 22.09.2015 Muutmise 10.10.2018 kuupäev: kuupäev: Versioon: 2.0 Klient: Keskkonnaministeeriumi Infotehnoloogiakeskus Projekt: Keskkonnaotsuste terviklik autonoomne süsteem (KOTKAS) Dokument: AVE
Loomise 22.09.2015 Muutmise 10.10.2018 kuupäev: kuupäev: Versioon: 2.0 Klient: Keskkonnaministeeriumi Infotehnoloogiakeskus Projekt: Keskkonnaotsuste terviklik autonoomne süsteem (KOTKAS) Dokument: AVE
efo03v2kkl.dvi
 Eesti koolinoorte 50. füüsikaolümpiaad 1. veebruar 2003. a. Piirkondlik voor Gümnaasiumi ülesannete lahendused NB! Käesoleval lahendustelehel on toodud iga ülesande üks õige lahenduskäik. Kõik alternatiivsed
Eesti koolinoorte 50. füüsikaolümpiaad 1. veebruar 2003. a. Piirkondlik voor Gümnaasiumi ülesannete lahendused NB! Käesoleval lahendustelehel on toodud iga ülesande üks õige lahenduskäik. Kõik alternatiivsed
Microsoft PowerPoint - EMCS13
 EMCS piloot-projekt Raigo Veisberg Maksu- ja Tolliameti kaudsete maksude ja aktsiiside talitus TEEMAD Mis on EMCS EMCS käivitumine EMCS kasutamine ja selle võimalused E-saateleht Info edastamine EMCS infosüsteemi
EMCS piloot-projekt Raigo Veisberg Maksu- ja Tolliameti kaudsete maksude ja aktsiiside talitus TEEMAD Mis on EMCS EMCS käivitumine EMCS kasutamine ja selle võimalused E-saateleht Info edastamine EMCS infosüsteemi